CVAT工具的详细使用教程(视频标注)
CVAT工具的使用教程—视频标注
- 一、项目(Project)创建与设置
- 二、任务(Task)创建与配置
- 三、视频标注详解(基础)
- 1. 进入标注界面
- 2. 选择标注模式和形状
- 3. 开始标注(创建轨道与关键帧)
- 4. 利用插值节省工作量
- 5. 处理物体消失与出现
- 6. 保存与导出
- 四、视频标注详解:使用多边形进行精细跟踪
- 1. 前提准备
- 2. 选择模式和工具
- 3. 绘制初始多边形(关键帧)
- 4. 设置起点和方向(关键!)
- 5. 利用插值并创建后续关键帧
- 6. 处理物体消失与出现
- 7.保存与导出
- 五、快捷键汇总
一、项目(Project)创建与设置
项目(Project) 主要用于管理多个共享同一套标签体系的任务(Tasks),这在管理大型数据集时非常有用。
-
登录CVAT
在浏览器中访问CVAT(通常是http://服务器IP:8080),使用你的账号登录。 -
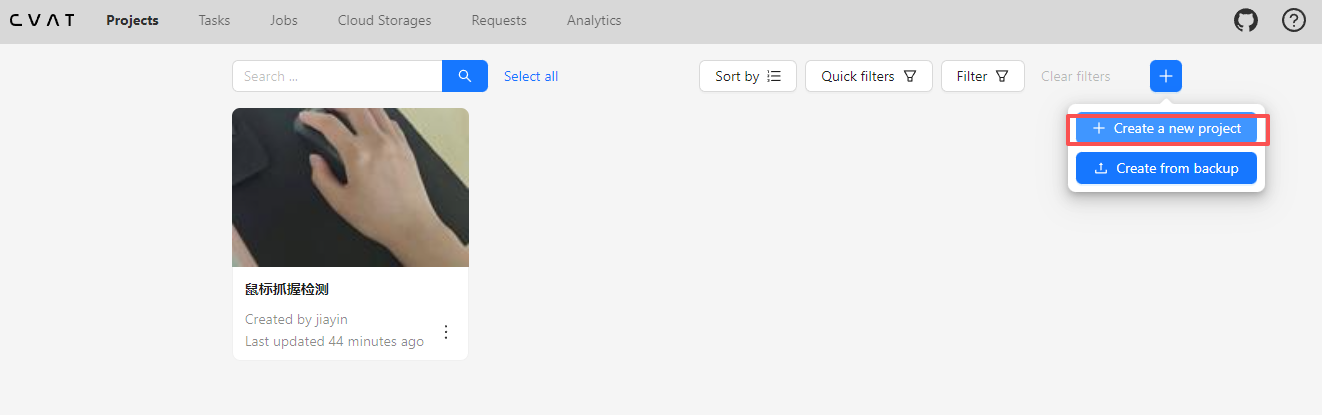
创建新项目
在顶部导航栏点击 “Projects”,点击页面上的 “+” 按钮,创建新项目
-
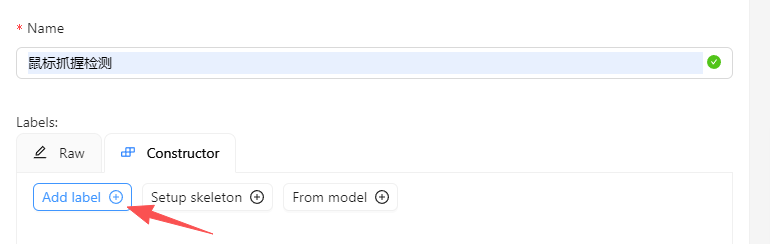
填写项目信息
- Name: 为你的项目起一个易于识别的名称。
- Labels (标签): 这是项目的核心设置,定义了一套统一的标签列表,该项目下的所有任务都会继承这些标签。
– 点击 “Add label” 添加一个标签。
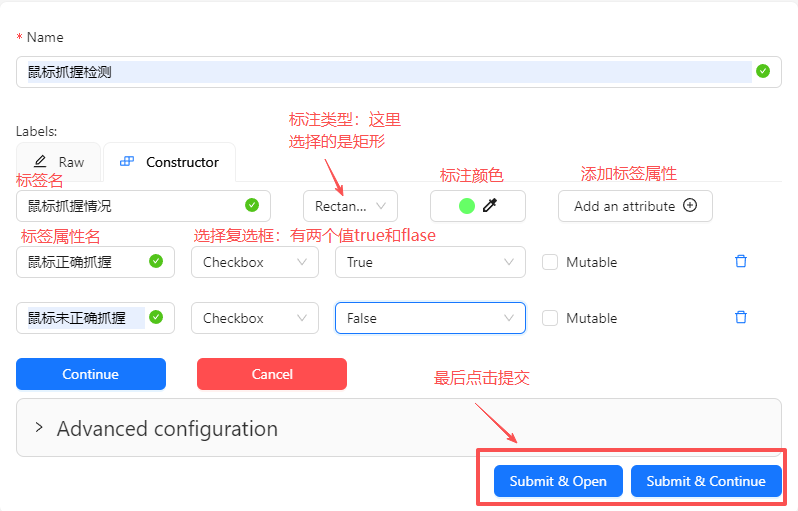
– 在 Label name 字段输入标签名称(如 “person”, “car”, “bicycle”)。
– (可选)选择标签的颜色。
– (可选)点击 Add an attribute 为标签添加属性(例如为 “person” 添加 “pose” 属性,值可以是 “standing”, “sitting”, “running”)。这可以丰富标注信息。
- 你可以添加多个标签。对于视频目标跟踪任务,通常只需定义一个标签(单类别多目标跟踪)。
二、任务(Task)创建与配置
任务(Task) 是你实际进行标注工作的单元,它包含了你要标注的具体数据(图片或视频)以及最终的标注结果。
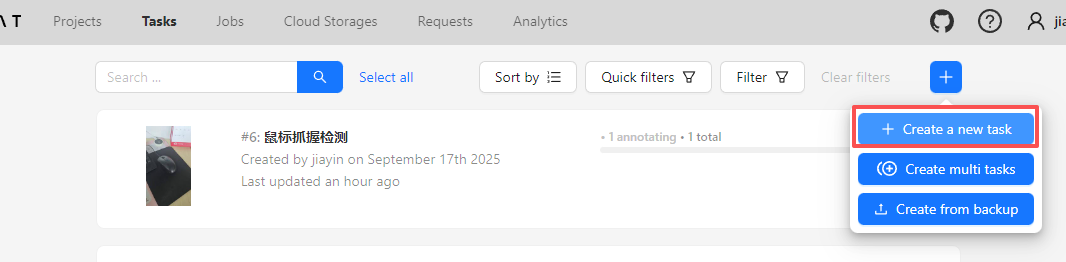
- 在Tasks页面创建任务
在顶部导航栏点击 “Tasks”,然后点击 “+” 按钮并选择 “Create new task”。
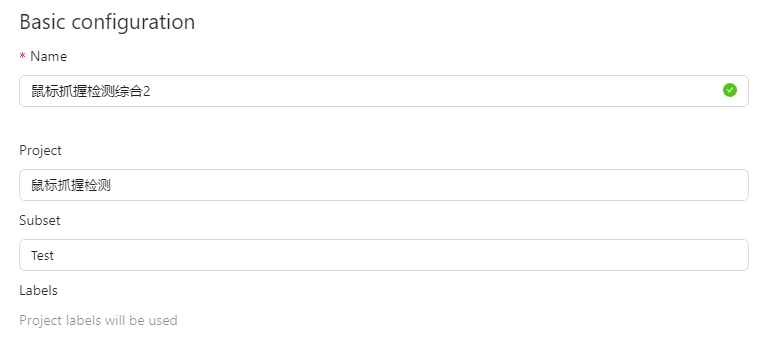
- 填写任务基本信息
- Name: 为任务命名(如 “street_scene_video_annotation”)。
- Project: (可选但推荐) 从下拉菜单中选择上一步创建的项目。选择后,该任务将自动继承项目中定义的所有标签。
- Labels: (如果未关联项目,则必须填写) 如果任务不归属于任何项目,则需要在此处手动添加标签,方式同项目中的标签设置。
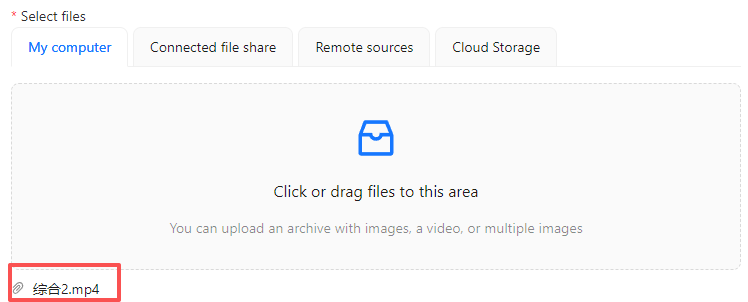
- 上传数据
点击 “Select files” 或直接将视频文件(如MP4文件)拖拽到上传区域。如果文件上传错了,重新上传即可,会覆盖当前文件。
- 高级配置(Advanced configuration)
点击 “Advanced configuration” 可以展开高级设置,对于视频标注,以下几个参数较为重要:
- Image Quality: 设置上传图像的质量,不影响原始数据,适当降低可加快上传速度。
- Overlap Size: 如果把任务分成多个作业(Job)由多人标注,此参数设置作业之间重复的帧数,便于衔接。
- Segment Size: 指定每个作业(Job)包含的帧数,用于将大数据集分割成多个小部分进行分配。
- Start Frame, Stop Frame: 设置视频标注的起始帧和结束帧,用于只标注视频的一部分。
- Frame Step: 设置抽帧频率(例如设置为2,则每隔2帧标注1帧),可用于快速预览或减少标注工作量。
这里只做介绍,不做处理,上传完视频点击submit提交即可。
三、视频标注详解(基础)
视频标注的核心是追踪模式(Track Mode),它通过关键帧和插值功能,能极大地提高标注效率。
1. 进入标注界面
1)在 “Tasks” 页面找到刚创建的任务,点击 “Open”。
2)在任务详情页,点击左下角的 Job #编号 进入标注界面。
3)或者直接在导航栏点击Jobs,找到视频点击进入标注界面
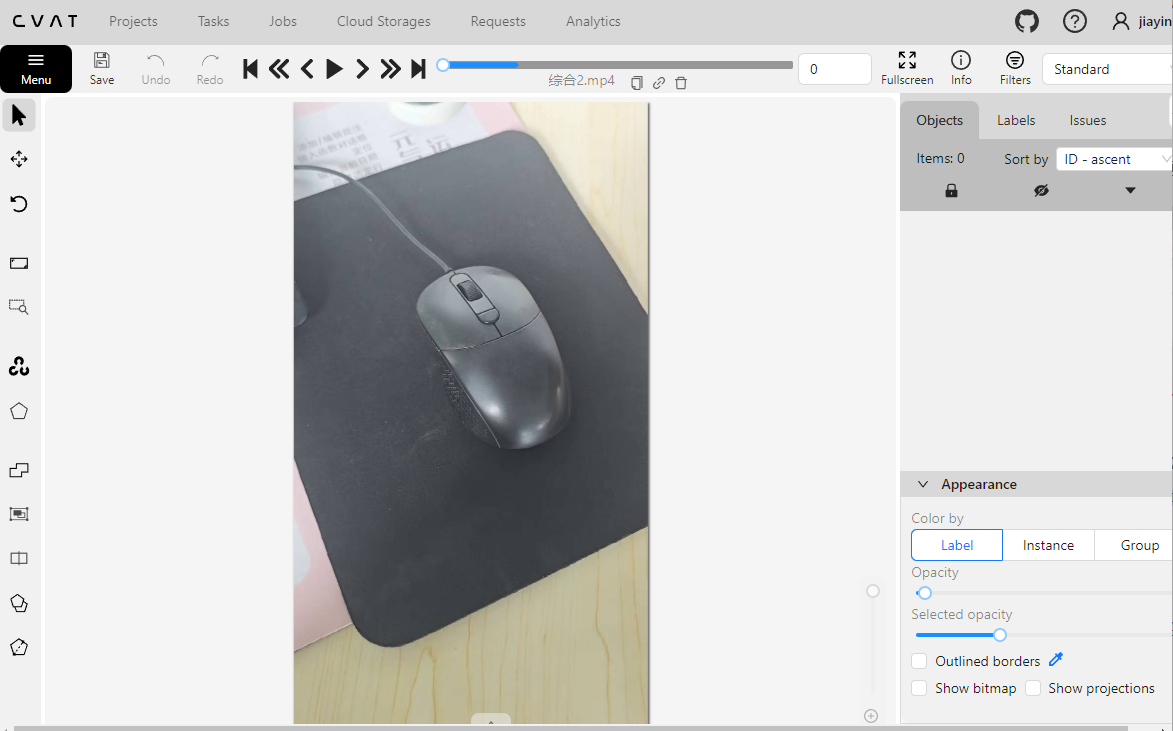
2. 选择标注模式和形状
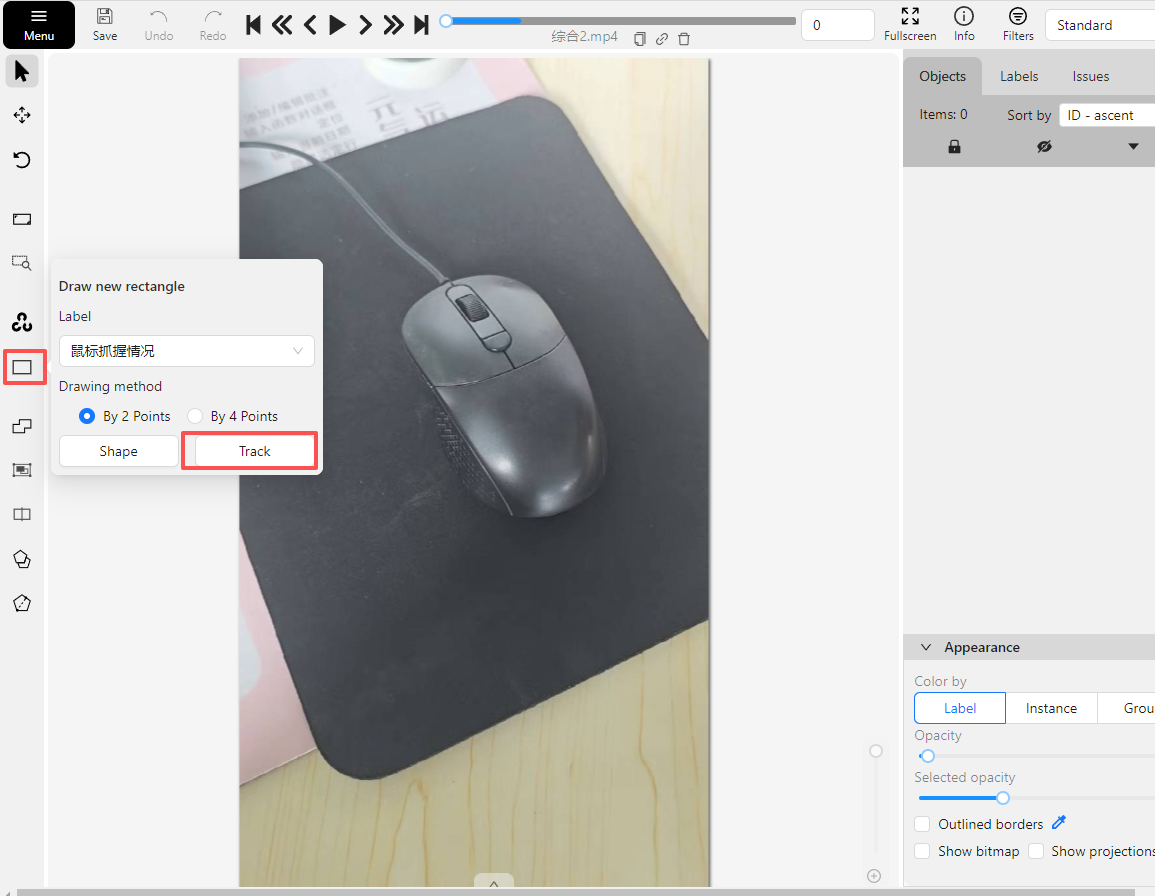
1)在左侧工具栏选择需要的形状(如矩形Rectangle)。
2)关键步骤:将上方的标注模式从 “Shape” 切换为 “Track”。这是为视频中的对象创建轨道(唯一ID)并启用自动插值的关键。
3. 开始标注(创建轨道与关键帧)
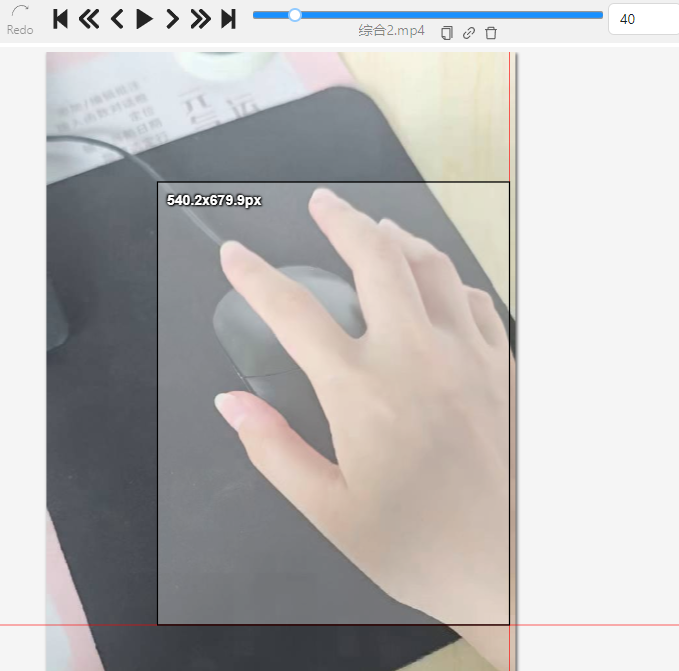
1)在物体首次出现的帧上,绘制边界框(或其他形状)。系统会自动为该物体创建一条轨道(Track) 并分配唯一ID。
选中区域后双击左键,即可标注区域
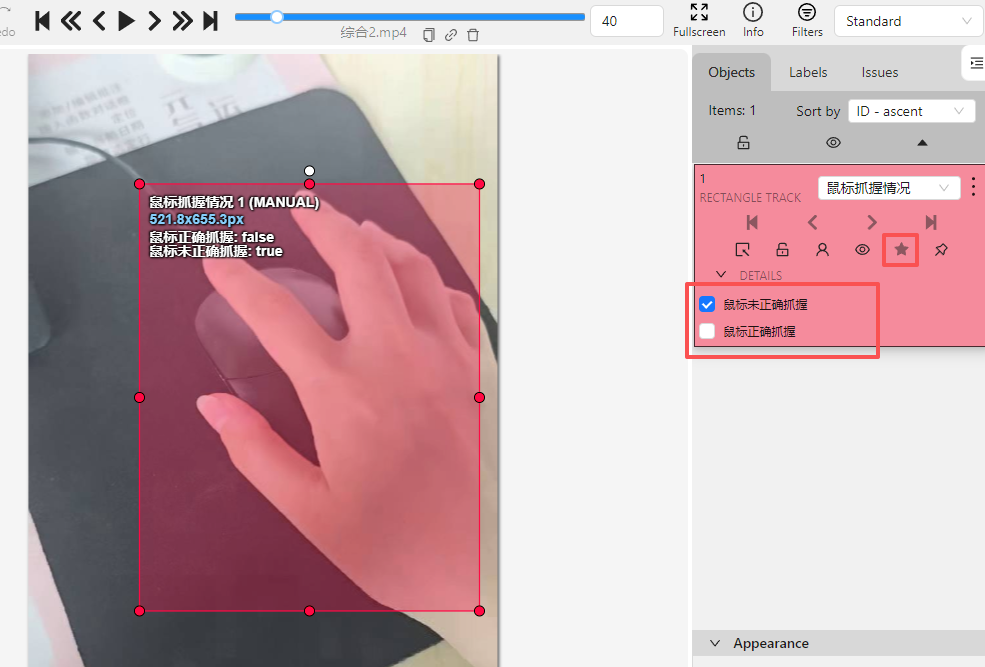
2)点击星标(★)按钮,将当前帧标记为关键帧(Keyframe)。这表明物体在此帧的状态是确定的。快捷键:K
可以修改当前关键帧的details(可以看出这里就是创建project时配置的属性)
3)通过点击下图可以调节视频帧的位置。
或使用快捷键操作:
帧数前进:F或者V
帧数后退:D或者C

4. 利用插值节省工作量
1)跳转到物体姿态或位置发生显著变化的后续帧(例如,按 F 下一帧,D 上一帧)。
2)调整物体的边界框以匹配新位置,并再次按 K 键将其设为目标帧。
3)CVAT会自动计算并生成两个关键帧之间所有中间帧的标注,无需你逐帧手动调整。
5. 处理物体消失与出现
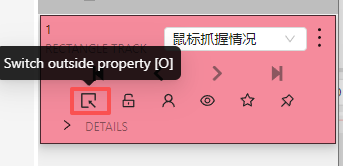
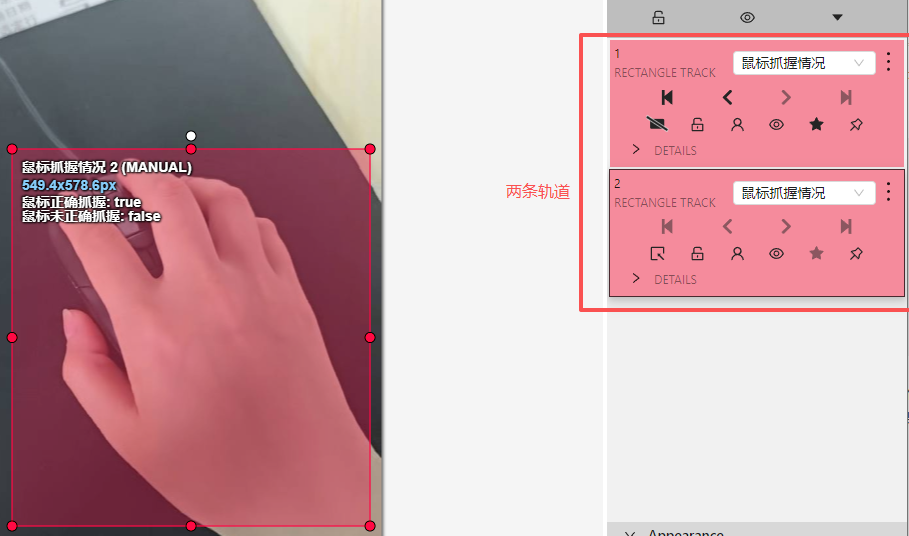
1)当物体消失或离开画面时,选中该物体的轨道,点击 Outside 属性按钮(或按快捷键 O)。这会告诉系统物体在此帧之后不可见,停止自动插值。
2)如果同一个物体在消失几帧后重新出现,系统可能会将其误判为新物体并分配新ID。你可以使用 Merge 功能(按 M 键)手动合并两条轨道,以保持ID一致性。
6. 保存与导出
- 定期保存
标注过程中,记得随时点击页面上方的 Save (或 Save Work) 按钮,或使用快捷键 Ctrl+S 保存工作进度,防止意外丢失。 - 导出标注结果
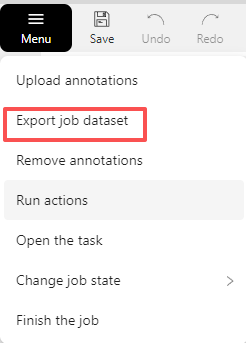
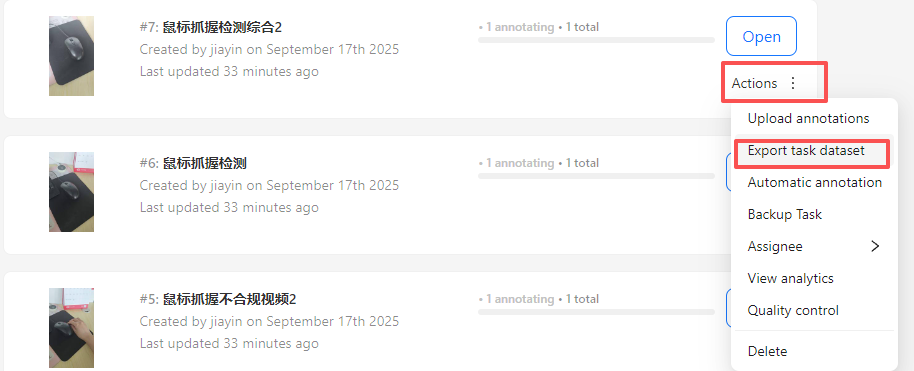
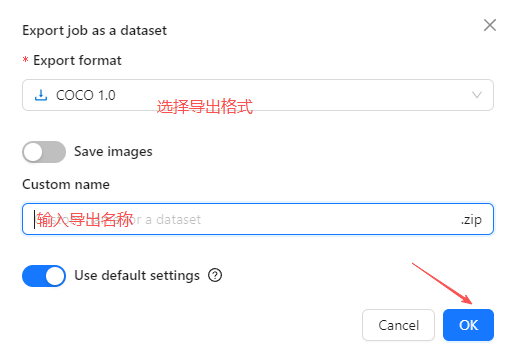
1)完成标注后,在标注界面点击 Menu,或在任务列表页面点击任务右侧的 …,选择 Export task dataset。
或者
根据你的下游任务需求选择合适的格式。例如:
视频目标跟踪:常用 MOT 1.1 格式。
目标检测:常用 COCO 1.0, Pascal VOC 1.1, YOLO 1.1。
分割任务:Segmentation mask。
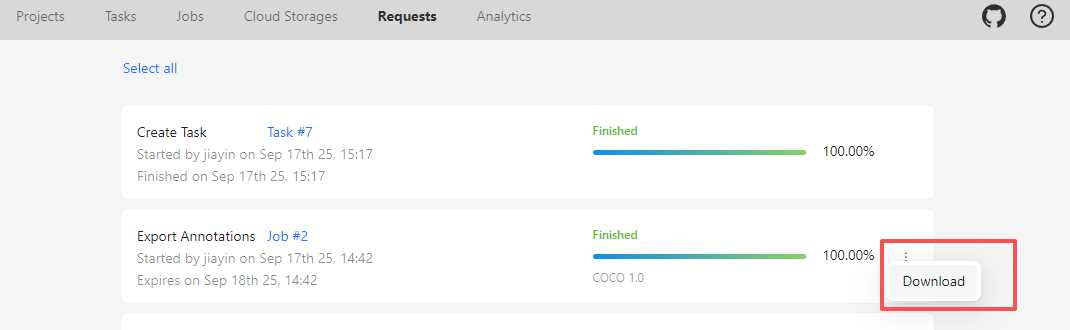
在Requests页面可以看到导出进度,选择download下载
四、视频标注详解:使用多边形进行精细跟踪
1. 前提准备
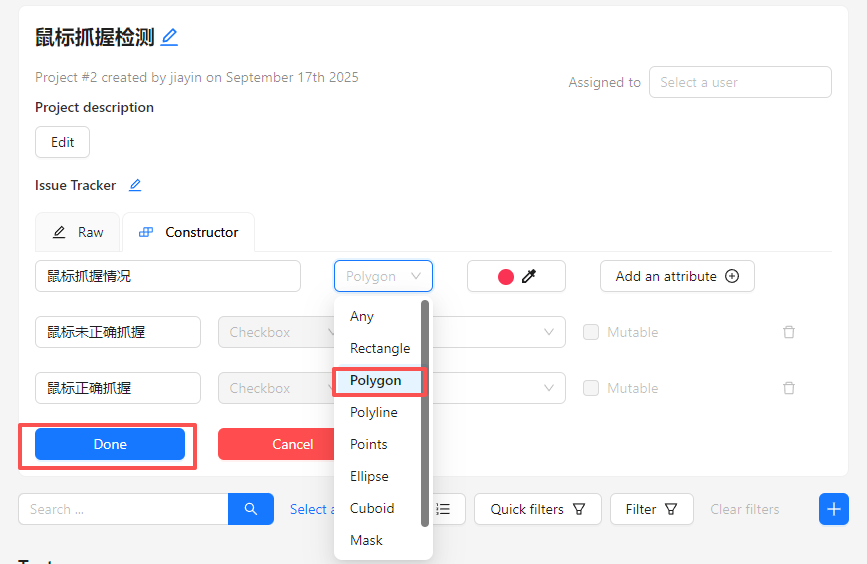
我们修改之前创建的project的标注类型为多边形(Polygon),可进行精细跟踪
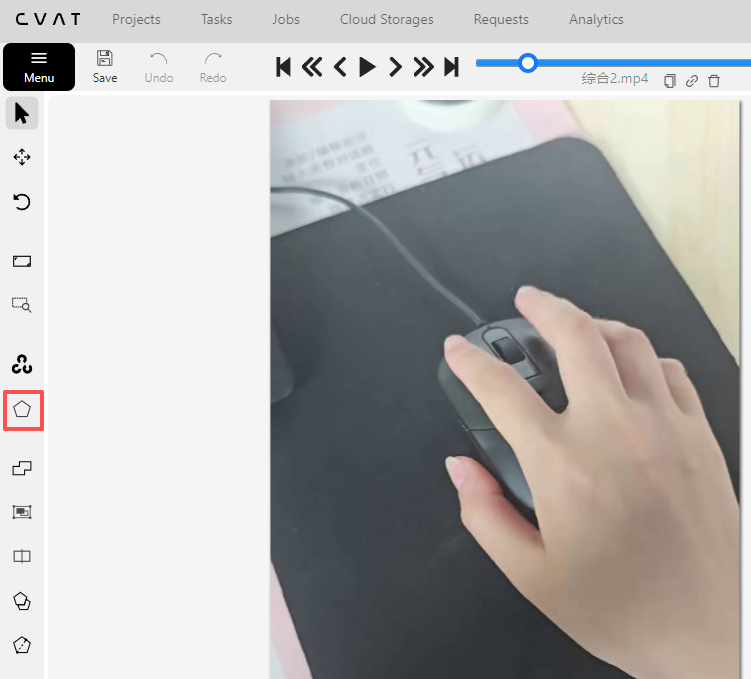
打开你的视频标注任务,点击Job编号进入标注界面。这里还是操作同一个视频。可以看到之前的矩形变成了多边形
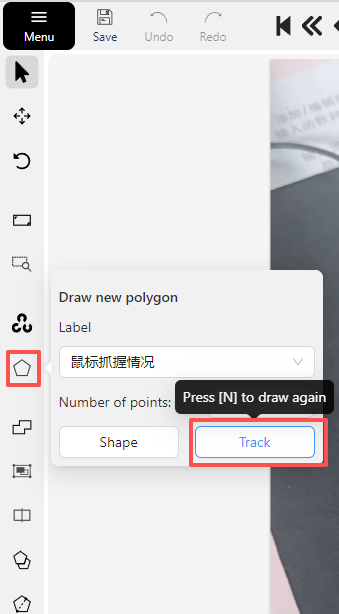
2. 选择模式和工具
1)在左侧工具栏中,选择 Polygon(多边形)作为标注形状。在上方标注模式切换中,选择 “Track”(追踪)模式,而不是"Shape"模式。这是为视频中的对象创建轨道(唯一ID)并启用自动插值的关键。
3. 绘制初始多边形(关键帧)
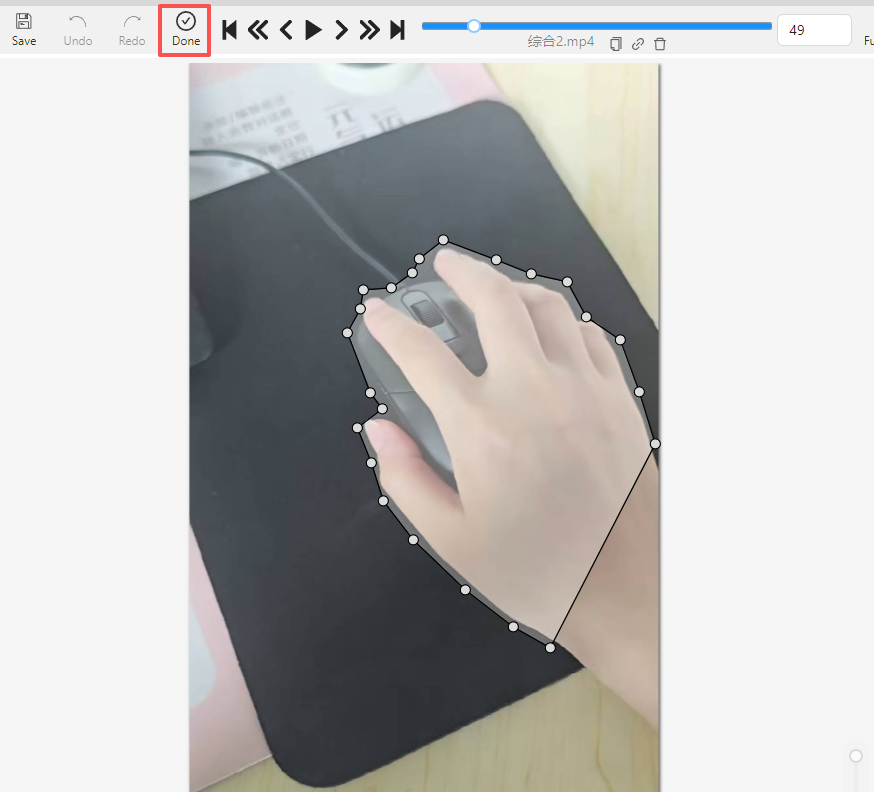
1)在物体首次出现或形状发生显著变化的帧上,仔细绘制多边形的轮廓。
2)绘制方法:可以通过单击添加点,或按住Shift键拖动鼠标进行更精细的绘制。
3)完成绘制后,按 N 键或点击顶部面板的 Done按钮确认形状。
4)取消绘制:可以点击顶部面板的Undo按钮,或者右击鼠标取消点
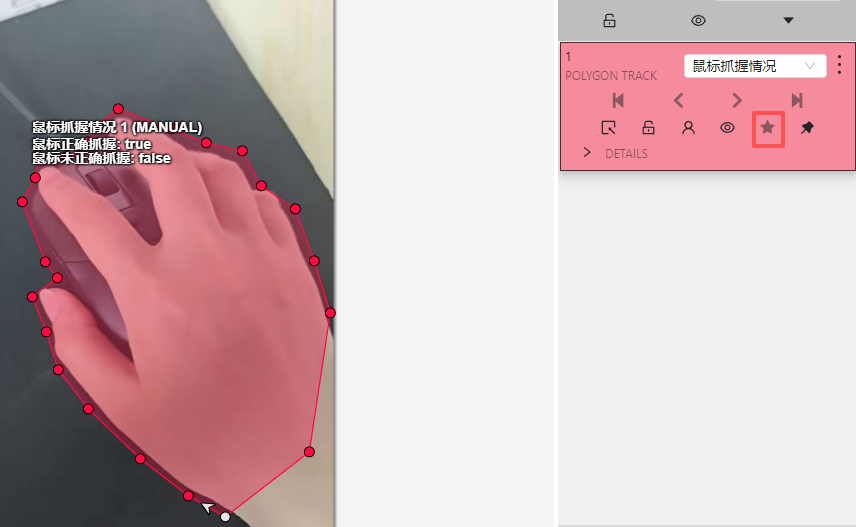
5)重要:按 K 键或点击星标(★)按钮,将当前帧标记为关键帧(Keyframe)。这表明物体在此帧的形状是确定的。
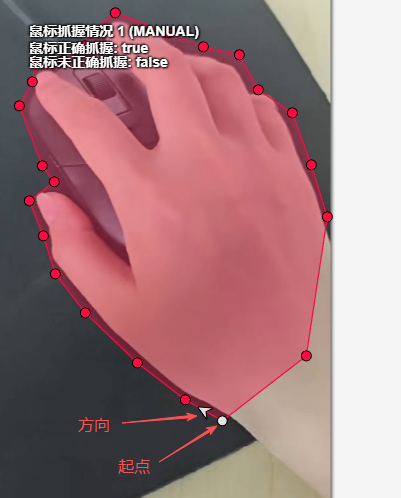
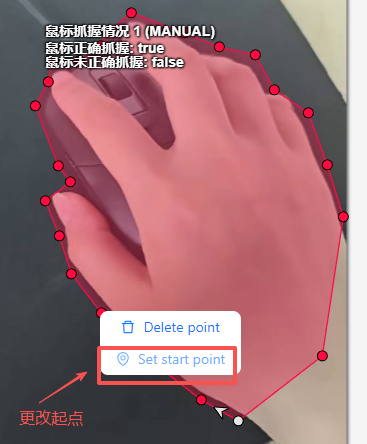
4. 设置起点和方向(关键!)
系统依赖多边形的起点(第一个点)和方向(顺时针或逆时针)进行插值计算。
1)查看起点:起点通常以一个不同颜色或稍大的点显示。
2)更改起点:右键点击你希望设置为新起点的顶点,选择 “Set starting point”。
3)更改方向:点击方向箭头,即可切换方向。
5. 利用插值并创建后续关键帧
1)跳转到物体形状或位置发生显著变化的后续帧(例如,按 F 下一帧,D 上一帧)。
2)方法一(微调):如果形状变化不大,可以直接移动现有的点进行编辑。
3)方法二(重绘):如果形状变化很大或跳过了较多帧,按 Shift + N 组合键。这会清除当前帧的多边形,允许你重新绘制一个新的多边形。
4)确保一致性:新多边形的起点和方向必须与初始关键帧保持一致,否则自动插值会出现扭曲。
5)绘制完成后再次按 K 键将其设为目标帧。CVAT会自动计算并生成两个关键帧之间所有中间帧的多边形标注,无需你逐帧手动调整。
6. 处理物体消失与出现
参考上文:处理物体小时与出现
7.保存与导出
参考上文:保存与导出
五、快捷键汇总
快捷键:熟练使用快捷键能极大提升效率。
- N: 绘制形状后接受并创建(如绘制矩形后按N完成)。
- F或V: 下一帧。
- D或C: 上一帧。
- K: 标记/取消标记关键帧。
- O: 为选中的轨道标记 Outside 属性(物体消失)。
- M: 合并选中的轨道。