计算机视觉 - 对比学习(下)不用负样本 BYOL + SimSiam 融合Transformer MoCo-v3 + DINO
对比学习论文综述【论文精读】
对比学习论文综述【论文精读】笔记
自监督学习,特别是对比学习,如何在不使用负样本的情况下避免模型坍塌(Collapse)?本文深入精读BYOL、SimSiam、MoCo-v3及DINO等里程碑式论文,剖析了“停止梯度”(Stop-Gradient)、自蒸馏(Self-Distillation)等核心机制的工作原理。我们将探讨Batch Normalization是否扮演了“隐式负样本”的角色,并揭示ViT架构下自监督训练的不稳定性问题及其解决方案。最后,通过对不同模型在分类与下游任务上的性能对比,为您提供一幅通往更智能、更简洁表征学习之路的清晰路线图。
目录
第三阶段:不用负样本
3.1 BYOL 在线网络和目标网络
3.2 SimSiam 简化的 总结性的工作
第四阶段:融合Transformer (ViT出来之后)
4.1 MoCo-v3
4.2 DINO 自蒸馏 Self-distillation with no labels
第三阶段:不用负样本
3.1 BYOL 在线网络和目标网络
Bootstrap Your Own Latent A New Approach to Self-Supervised Learning
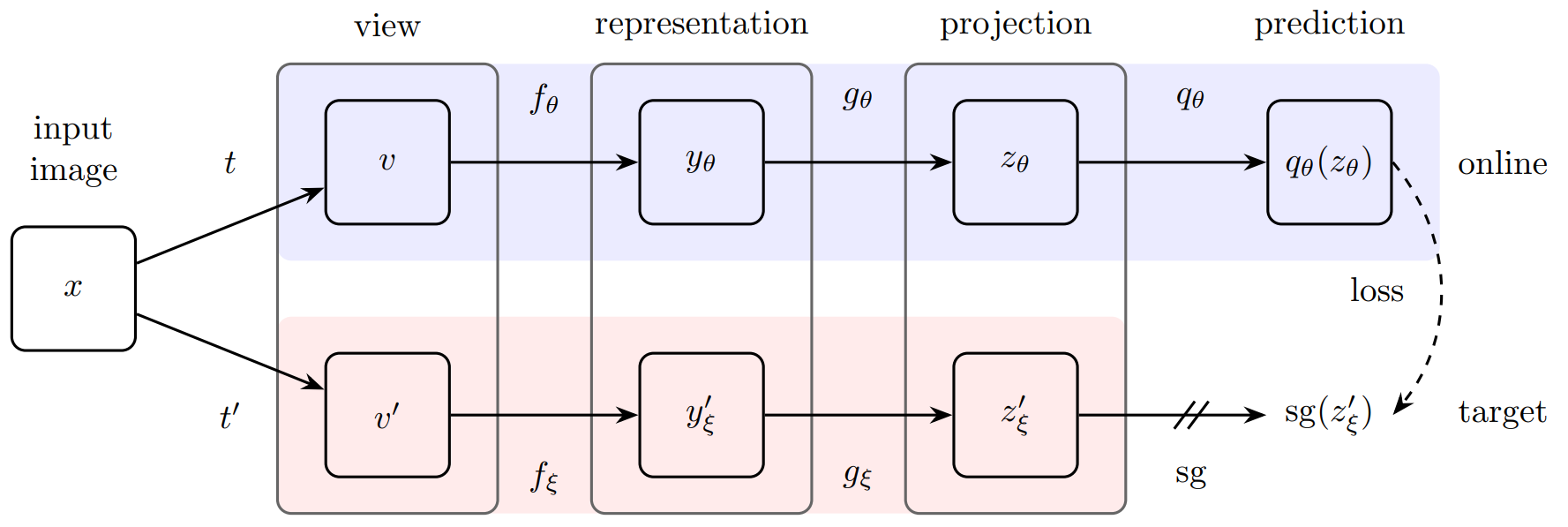
BYOL包含两个神经网络:在线网络(Online Network) 和 目标网络(Target Network)。
-
网络结构:
-
在线网络(θ): 包含三个部分:编码器f_θ、投影头 g_θ 和预测头 q_θ。这个网络通过梯度下降进行更新。
-
目标网络(ξ): 与在线网络结构相同(编码器 f_ξ、投影头 g_ξ),但没有预测头。它的参数不是通过梯度更新,而是在线网络参数的指数移动平均(EMA): ξ ← τξ + (1-τ)θ,其中 τ 是一个接近1的动量系数(如0.99)借鉴MoCo思想。
-
-
训练流程:
-
Step 1: 对一张图像
x生成两个随机增强视图 v 和 v'。 -
Step 2: 将视图
v输入在线网络,得到输出 y_θ = g_θ(f_θ(v)),再通过预测头得到最终预测 q_θ(y_θ)。 -
Step 3: 将视图 v' 输入目标网络,得到输出 y'_ξ = g_ξ(f_ξ(v'))。注意,目标网络提供的是一个稳定的“回归目标”。(表征+投影的思想 借鉴SimCLR)
-
Step 4: 计算损失函数:在线网络的预测 q 与目标网络的输出 y 的均方误差(MSE),并对
v和v'交换角色再计算一次损失。 -
Step 5: 最小化总损失
L,只更新在线网络(θ)的参数。 -
Step 6: 使用动量更新规则来更新目标网络(ξ)的参数:ξ ← τξ + (1-τ)θ 。(借鉴MoCo)
-
为什么只用正样本 不会产生坍塌collapse?
神奇博客 用MOCOv2(MLP中不含BN)复现BYOL 发现坍塌了 怀疑BN和不坍塌有强烈关系。
博客解释:整个batch算来的均值和方差去做归一化,在算某个样本的loss的时候,其实也看到了其他样本的特征,这里面是有泄露的,所以你可以把batch里的其他样本想成一种隐式的负样本。
换句话说,当你有了bn的时候,BYOL其实并不是只是正样本在自己和自己学,其实也在做对比,BYOL做的对比任务就是:当前正样本的图片,和BN产生的平均图片的差别。
BYOL works even without batch statistics
论文作者作出回应 利用消融实验。 比较小的结果代表坍塌了。

右下角 SimCLR 编码和投影不用归一化的话;也炸了。人家是有显式负样本的。
有一组 Projector 有BN也失败了。
这两个例子 说明BN和隐式负样本无关。
结论:BN的主要作用只是帮助模型稳定训练,提高模型训练的稳健性,让模型不会坍塌。
3.2 SimSiam 简化的 总结性的工作
Exploring Simple Siamese Representation Learning
even using none of the following: (i) negative sample pairs, (ii) large batches, (iii) momentum encoders. 负样本;大批量;动量更新自编码器 这些都不需要。
两个网络共享参数
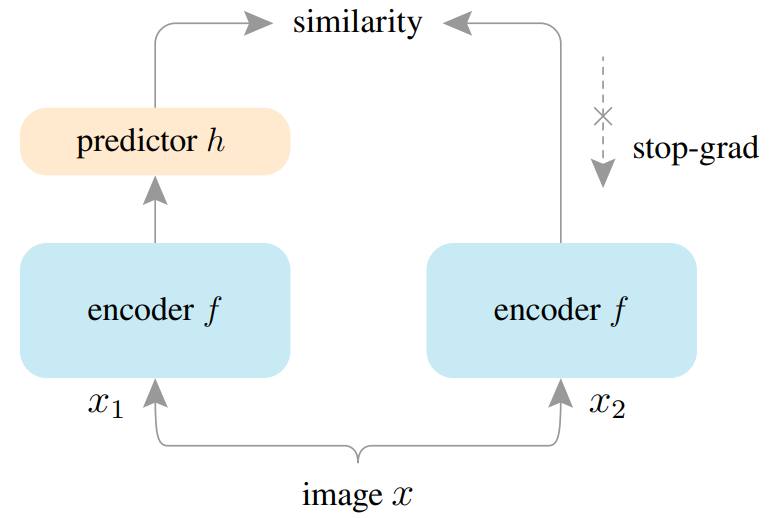
stop-grad 防止坍塌的核心;否则x1接近x2 x2接近x1 参数更新时会坍塌。
在计算 余弦相似度损失函数时 用z.detach() 阻断梯度回传,避免对称性的双向更新。
一个分支(带有预测头 h)的任务是去预测另一个分支(目标分支)的输出,而目标分支是相对稳定的(防止互相抄袭)。
-
在计算
D(p1, z2)时,f通过z1(来自x1)的梯度进行更新。 -
在计算
D(p2, z1)时,f通过z2(来自x2)的梯度进行更新。
# f: backbone + projection mlp
# h: prediction mlpfor x in loader: # load a minibatch x with n samplesx1, x2 = aug(x), aug(x) # random augmentationz1, z2 = f(x1), f(x2) # projections, n-by-dp1, p2 = h(z1), h(z2) # predictions, n-by-dL = D(p1, z2)/2 + D(p2, z1)/2 # lossL.backward() # back-propagateupdate(f, h) # SGD updatedef D(p, z): # negative cosine similarity 余弦相似度z = z.detach() # stop gradientp = normalize(p, dim=1) # l2-normalizez = normalize(z, dim=1) # l2-normalizereturn -(p*z).sum(dim=1).mean()
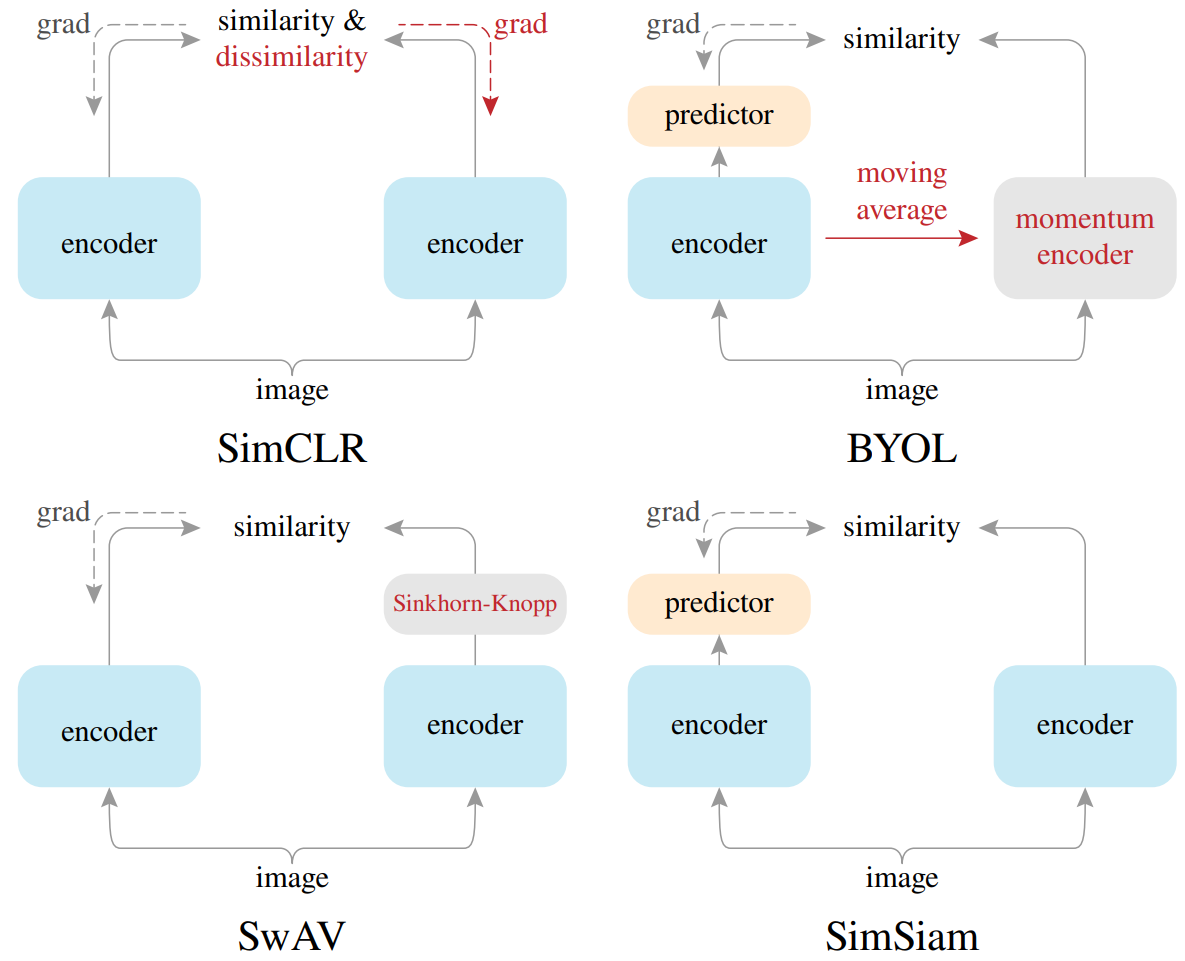
四个架构的对比:
SimCLR 端到端 两把都需要grad ; SwAV 用SK算法得到聚类中心;
BYOL 有一个predictor 转换为预测任务;SimSiam 没用动量编码器而是共享参数。
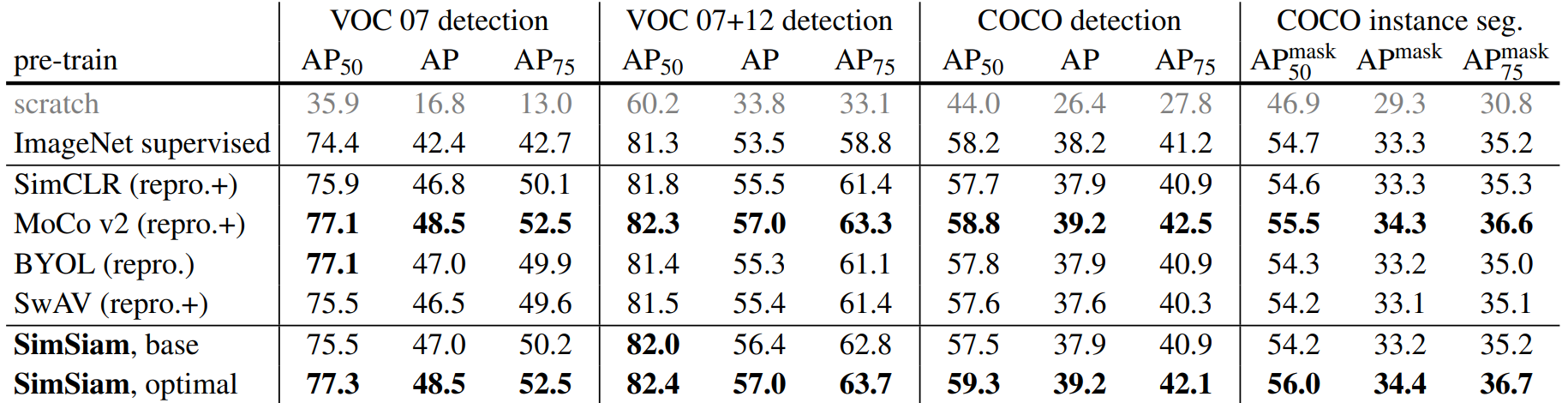
在原分类问题上 (SwAV不用multi-crop的话)最强的分类模型是BYOL
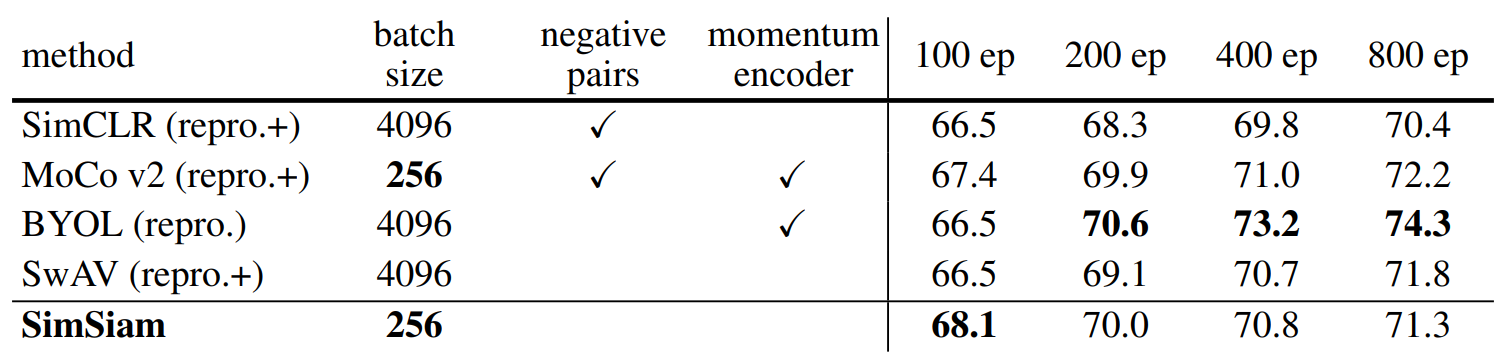
下游任务迁移学习上 MoCo和SimSiam在 VOC和COCO 目标检测上表现更好
还有一种算法 Barlow Twins 损失函数直接作用在交叉相关矩阵 C 上,其目标是让这个矩阵尽可能接近单位矩阵。
第四阶段:融合Transformer (ViT出来之后)
4.1 MoCo-v3
An Empirical Study of Training Self-Supervised Vision Transformers
架构上 结合了MoCo-v2和SimSiam。
学习MoCo-v2:q和momentum_k 两个网络 + 对比学习loss
学习SimSiam:predictor + 对称损失
# f_q: encoder: backbone + proj mlp + pred mlp
# f_k: momentum encoder: backbone + proj mlp
# m: momentum coefficient
# tau: temperature
for x in loader: # load a minibatch x with N samplesx1, x2 = aug(x), aug(x) # augmentationq1, q2 = f_q(x1), f_q(x2) # queries: [N, C] eachk1, k2 = f_k(x1), f_k(x2) # keys: [N, C] eachloss = ctr(q1, k2) + ctr(q2, k1) # symmetrizedloss.backward()update(f_q) # optimizer update: f_qf_k = m*f_k + (1-m)*f_q # momentum update: f_k# contrastive loss
def ctr(q, k):logits = mm(q, k.t()) # [N, N] pairslabels = range(N) # positives are in diagonalloss = CrossEntropyLoss(logits/tau, labels)return 2 * tau * loss骨干网络backbone 从残差网络换成了 Transformer。
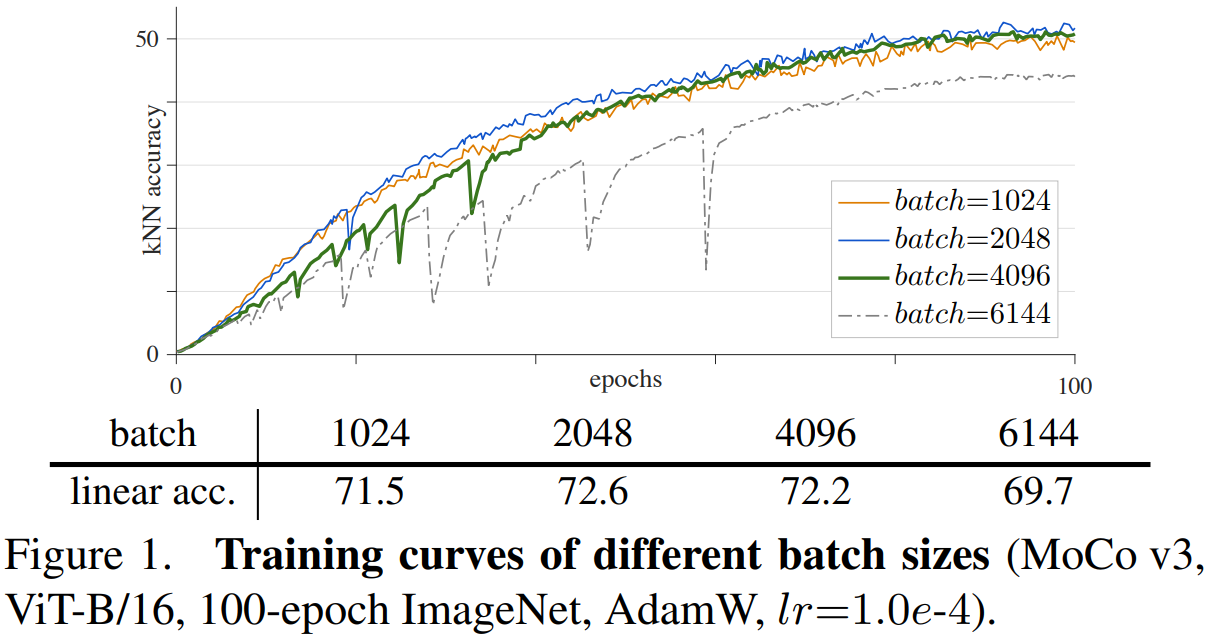
训练稳定性问题stability 大batch=6144 训练一段准确率会掉下去。
查梯度发现 在第一次patch分割的时候 有梯度波峰。
Trick:随机初始化再冻住 a fixed random patch projection layer
4.2 DINO 自蒸馏 Self-distillation with no labels
Emerging Properties in Self-Supervised Vision Transformers
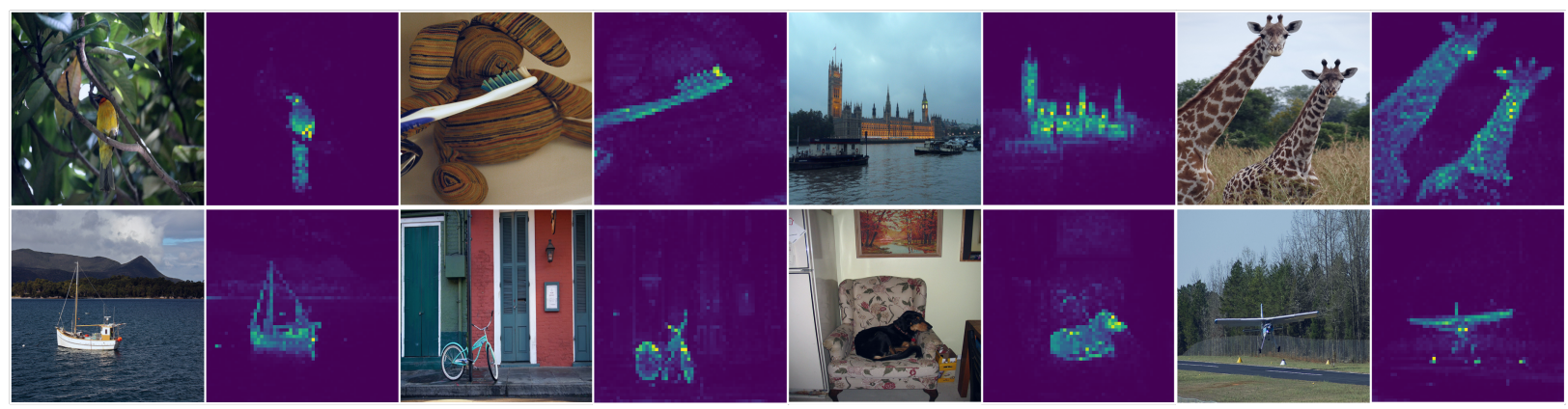
开头效果比较炸裂的图 ViT 无监督情况下,自注意力图片 自动实现分割轮廓。
就像BYOL的在线和目标 叫做学生和老师;老师网络centering中心化(类似BN)防止坍塌。
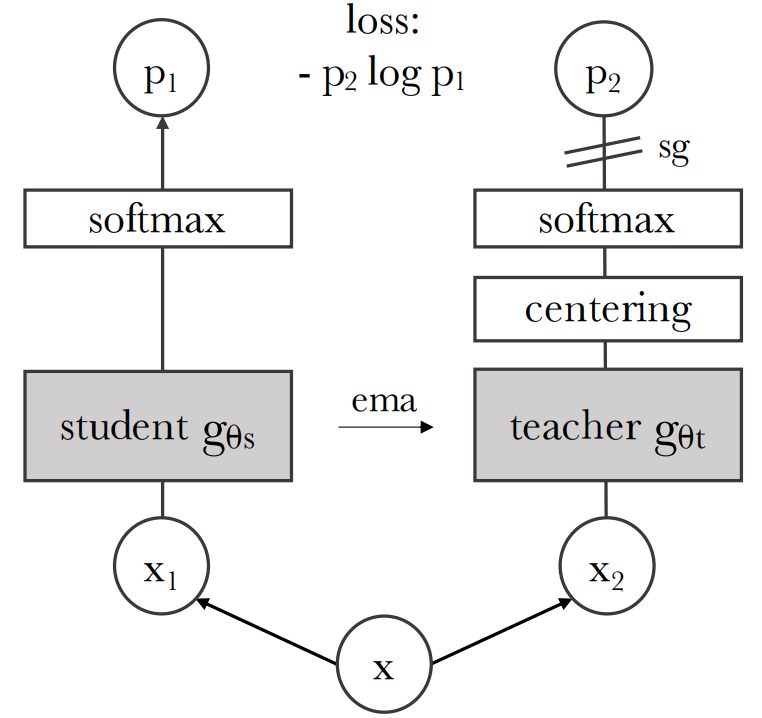
# gs, gt: student and teacher networks
# C: center (K)
# tps, tpt: student and teacher temperatures
# l, m: network and center momentum rates
gt.params = gs.params
for x in loader: # load a minibatch x with n samplesx1, x2 = augment(x), augment(x) # random viewss1, s2 = gs(x1), gs(x2) # student output n-by-Kt1, t2 = gt(x1), gt(x2) # teacher output n-by-Kloss = H(t1, s2)/2 + H(t2, s1)/2loss.backward() # back-propagate# student, teacher and center updatesupdate(gs) # SGDgt.params = l*gt.params + (1-l)*gs.paramsC = m*C + (1-m)*cat([t1, t2]).mean(dim=0)def H(t, s):t = t.detach() # stop gradients = softmax(s / tps, dim=1)t = softmax((t - C) / tpt, dim=1) # center + sharpenreturn - (t * log(s)).sum(dim=1).mean()