【系列文章】Linux系统中断的应用02-中断下文 tasklet
【系列文章】Linux系统中断的应用02-中断下文 tasklet
该文章为系列文章:Linux系统中断的应用中的第02篇
该系列的导航页连接:
【系列文章】Linux系统中断的应用-导航页
文章目录
- 【系列文章】Linux系统中断的应用02-中断下文 tasklet
- 一、什么是 tasklet
- 二、tasklet 相关接口函数
- 2.1静态初始化函数
- 2.2动态初始化函数
- 2.3关闭函数
- 2.4使能函数
- 2.5调度函数
- 2.6销毁函数
- 二、实验程序的编写
- 2.1运行测试
在上一篇文章中,我们申请 GPIO 中断,使用的是 request_irq,但是 request_irq 绑定的中断服务程序指的是中断上文。在之前讲解了:中断分为俩个部分——中断上文和中断下文。本章节我们来学习中断下文的一种实现方式——tasklet。
一、什么是 tasklet
在 Linux 内核中,tasklet 是一种特殊的软中断机制,被广泛用于处理中断下文相关的任务。它是一种常见且有效的方法,在多核处理系统上可以避免并发问题。Tasklet 绑定的函数在同一时间只能在一个 CPU 上运行,因此不会出现并发冲突。然而,需要注意的是,tasklet 绑定的函数中不能调用可能导致休眠的函数,否则可能引起内核异常。
在 Linux 内核中,tasklet 结构体的定义位于 include/linux/interrupt.h 头文件中。其原型如下:
struct tasklet_struct {struct tasklet_struct *next;unsigned long state;atomic_t count;void (*func)(unsigned long);unsigned long data;
};
typedef struct tasklet_struct tasklet_t;
tasklet_struct 结构体包含以下成员:
next:指向下一个tasklet的指针,用于形成链表结构,以便内核中可以同时管理多个tasklet。
state:表示 tasklet 的当前状态。
count:用于引用计数,用于确保 tasklet 在多个地方调度或取消调度时的正确处理。
func:指向 tasklet 绑定的函数的指针,该函数将在 tasklet 执行时被调用。
data:传递给 tasklet 绑定函数的参数
此外,为了方便,还定义了 tasklet_t 类型作为 struct tasklet_struct 的别名。这样我们可以使用 tasklet_t 来声明 tasklet 变量,而不是直接使用 struct tasklet_struct。
二、tasklet 相关接口函数
2.1静态初始化函数
在 Linux 内核中,有一个用于静态初始化 tasklet 的宏函数:DECLARE_TASKLET。这个宏函数可以帮助我们更方便地进行 tasklet 的静态初始化。
宏函数的原型如下:
#define DECLARE_TASKLET(name,func,data) \
struct tasklet_struct name = { NULL,0,ATOMIC_INIT(0),func,data}
其中,name 是 tasklet 的名称,func 是 tasklet 的处理函数,data 是传递给处理函数的参数。初始化状态为使能状态。
如果 tasklet 初始化函数为非使能状态,使用以下宏定义:
#define DECLARE_TASKLET_DISABLED(name,func,data) \
struct tasklet_struct name = { NULL,0,ATOMIC_INIT(1),func,data}
其中,name 是 tasklet 的名称,func 是 tasklet 的处理函数,data 是传递给处理函数的参数。初始化状态为非使能状态。
下面是一个示例,展示了如何使用 DECLARE_TASKLET 宏函数进行 tasklet 的静态初始化:
#include <linux/interrupt.h>
// 定义 tasklet 处理函数
void my_tasklet_handler(unsigned long data)
{// Tasklet 处理逻辑// ...
}// 静态初始化 taskletDECLARE_TASKLET(my_tasklet, my_tasklet_handler, 0);// 驱动程序的其他代码
在上述示例中,my_tasklet 是 tasklet 的名称,my_tasklet_handler 是 tasklet 的处理函数,0是传递给处理函数的参数。但是需要注意的是,使用 DECLARE_TASKLET 静态初始化的 tasklet无法在运行时动态销毁,因此在不需要 tasklet 时,应该避免使用此方法。如果需要在运行时销毁 tasklet,应使用 tasklet_init 和 tasklet_kill 函数进行动态初始化和销毁,接下来我们来学习动态初始化函数。
2.2动态初始化函数
在 Linux 内核中,可以使用 tasklet_init 函数对 tasklet 进行动态初始化。该函数原型为:
void tasklet_init(struct tasklet_struct *t, void (*func)(unsigned long), unsigned long data);
其中,t 是指向 tasklet 结构体的指针,func 是 tasklet 的处理函数,data 是传递给处理函数的参数
以下是一个示例,tasklet_init 函数进行动态初始化如下所示:
#include <linux/interrupt.h>
// 定义 tasklet 处理函数
void my_tasklet_handler(unsigned long data)
{
// Tasklet 处理逻辑
// ...
}
// 声明 tasklet 结构体
static struct tasklet_struct my_tasklet;
// 初始化 tasklet
tasklet_init(&my_tasklet, my_tasklet_handler, 0);
// 驱动程序的其他代码
在示例中,我们首先定义了 my_tasklet_handler 作为 tasklet 的处理函数。然后,声明了一个名为 my_tasklet 的 tasklet 结构体。
接下来,通过调用 tasklet_init 函数,进行动态初始化。通过使用 tasklet_init 函数,我们可以在运行时动态创建和初始化 tasklet。这样,我们可以根据需要灵活地管理和控制 tasklet 的生命周期。在不再需要 tasklet 时,可以使用 tasklet_kill函数进行销毁,以释放相关资源。
2.3关闭函数
在 Linux 内核中,可以使用 tasklet_disabled 函数来关闭一个已经初始化的 tasklet。该函数的原型如下:
void tasklet_disable(struct tasklet_struct *t);
其中,t 是指向 tasklet 结构体的指针。
以下是一个示例,使用 tasklet_disable 函数来关闭 tasklet。
#include <linux/interrupt.h>
// 定义 tasklet 处理函数
void my_tasklet_handler(unsigned long data)
{
// Tasklet 处理逻辑
// ...
}
// 声明 tasklet 结构体
static struct tasklet_struct my_tasklet;
// 初始化 tasklet
tasklet_init(&my_tasklet, my_tasklet_handler, 0);
// 关闭 tasklet
tasklet_disable(&my_tasklet);
// 驱动程序的其他代码
在上述示例中,我们首先定义了 my_tasklet_handler 作为 tasklet 的处理函数。然后,声明了一个名为 my_tasklet 的 tasklet 结构体,并使用 tasklet_init 函数对其进行初始化。最后,通过调用 tasklet_disable 函数,我们关闭了 my_tasklet。
关闭 tasklet 后,即使调用 tasklet_schedule 函数触发 tasklet,tasklet 的处理函数也不会再被执行。这可以用于临时暂停或停止 tasklet 的执行,直到再次启用(通过调用 tasklet_enable函数)。
需要注意的是,关闭 tasklet 并不会销毁 tasklet 结构体,因此可以随时通过调用tasklet_enable 函数重新启用 tasklet,或者调用 tasklet_kill 函数来销毁 tasklet。
2.4使能函数
在 Linux 内核中,可以使用 tasklet_enable 函数来使能(启用)一个已经初始化的 tasklet。该函数的原型如下:
void tasklet_disable(struct tasklet_struct *t);
其中,t 是指向 tasklet 结构体的指针。
以下是一个示例,展示如何使用 tasklet_enable 函数来使能 tasklet:
#include <linux/interrupt.h>
// 定义 tasklet 处理函数
void my_tasklet_handler(unsigned long data)
{
// Tasklet 处理逻辑
// ...
}
// 声明 tasklet 结构体
static struct tasklet_struct my_tasklet;
// 初始化 tasklet
tasklet_init(&my_tasklet, my_tasklet_handler, 0);
// 使能 tasklet
tasklet_enable(&my_tasklet);
在上述示例中,我们首先定义了 my_tasklet_handler 作为 tasklet 的处理函数。然后,声明了一个名为 my_tasklet 的 tasklet 结构体,并使用 tasklet_init 函数对其进行初始化。最后,通过调tasklet_enable 函数,我们使能(启用)了 my_tasklet。
使能 tasklet 后,如果调用 tasklet_schedule 函数触发 tasklet,则 tasklet 的处理函数将会被执行。这样,tasklet 将开始按计划执行其处理逻辑。
需要注意的是,使能 tasklet 并不会自动触发 tasklet 的执行,而是通过调用 tasklet_schedule函数来触发。同时,可以使用 tasklet_disable 函数来临时暂停或停止 tasklet 的执行。如果需要永久停止 tasklet 的执行并释放相关资源,则应调用 tasklet_kill 函数来销毁 tasklet。
2.5调度函数
在 Linux 内核中,可以使用 tasklet_schedule 函数来调度(触发)一个已经初始化的 tasklet执行。该函数的原型如下:
void tasklet_schedule(struct tasklet_struct *t);
其中,t 是指向 tasklet 结构体的指针。
以下是一个示例,展示如何使用 tasklet_schedule 函数来调度 tasklet 执行:
#include <linux/interrupt.h>
// 定义 tasklet 处理函数
void my_tasklet_handler(unsigned long data)
{
// Tasklet 处理逻辑
// ...
}
// 声明 tasklet 结构体
static struct tasklet_struct my_tasklet;
// 初始化 tasklet
tasklet_init(&my_tasklet, my_tasklet_handler, 0);
// 调度 tasklet 执行
tasklet_schedule(&my_tasklet);
// 驱动程序的其他代码
在上述示例中,我们首先定义了 my_tasklet_handler 作为 tasklet 的处理函数。然后,声明了一个名为 my_tasklet 的 tasklet 结构体,并使用 tasklet_init 函数对其进行初始化。最后,通过调用tasklet_schedule 函数,我们调度(触发)了 my_tasklet 的执行。需要注意的是,调度 tasklet 只是将 tasklet 标记为需要执行,并不会立即执行 tasklet 的处理函数。实际的执行时间取决于内核的调度和处理机制。
2.6销毁函数
在 Linux 内核中,可以使用 tasklet_kill 函数来销毁一个已经初始化的 tasklet,释放相关资源。该函数的原型如下:
void tasklet_kill(struct tasklet_struct *t);
其中,t 是指向 tasklet 结构体的指针。
以下是一个示例,展示如何使用 tasklet_kill 函数来销毁 tasklet:
#include <linux/interrupt.h>
// 定义 tasklet 处理函数
void my_tasklet_handler(unsigned long data)
{
// Tasklet 处理逻辑
// ...
}
// 声明 tasklet 结构体
static struct tasklet_struct my_tasklet;
// 初始化 tasklet
tasklet_init(&my_tasklet, my_tasklet_handler, 0);
tasklet_disable(&my_tasklet);
// 销毁 tasklet
tasklet_kill(&my_tasklet);
// 驱动程序的其他代码
在上述示例中,我们首先定义了 my_tasklet_handler 作为 tasklet 的处理函数。然后,声明了一个名为 my_tasklet 的 tasklet 结构体,并使用 tasklet_init 函数对其进行初始化。最后,通过调用 tasklet_kill 函数,我们销毁了 my_tasklet。
调用 tasklet_kill 函数会释放 tasklet 所占用的资源,并将 tasklet 标记为无效。因此,销毁后的 tasklet 不能再被使用。
需要注意的是,在销毁 tasklet 之前,应该确保该 tasklet 已经被停止(通过调用tasklet_disable 函数)。否则,销毁一个正在执行的 tasklet 可能导致内核崩溃或其他错误。
一旦销毁了 tasklet,如果需要再次使用 tasklet,需要重新进行初始化(通过调用 tasklet_init函数)。在下一小节中我们将使用上述 tasklet 函数相关接口函数进行相应的实验。
二、实验程序的编写
本实验将实现注册显示屏触摸中断,每按当触摸 LCD 显示屏就会触发中断服务函数,在中断服务函数中调度中断下文 tasklet 处理函数,打印“This id test_interrupt”和“data is 1”。
在驱动程序中的模块初始化函数中,我们将 GPIO 转换为中断号,并使用 request_irq 函数请求中断,然后对 tasklet 进行初始化。在中断处理函数中,我们调度 tasklet 执行,使得当中断触发时,tasklet 会被调度执行。在模块退出函数中,我们释放中断资源,并使能 tasklet 销毁tasklet。
编写完成的 interrupt.c 代码如下所示,添加的代码已加粗表示。
#include <linux/module.h>
#include <linux/init.h>
#include <linux/interrupt.h>
#include <linux/gpio.h>
// #include <linux/delay.h>int irq;
struct tasklet_struct mytasklet;
// 定义 tasklet 处理函数
void mytasklet_func(unsigned long data)
{printk("data is %ld\n", data);// msleep(3000);
}// 中断处理函数
irqreturn_t test_interrupt(int irq, void *args)
{printk("This id test_interrupt\n");tasklet_schedule(&mytasklet); // 调度 tasklet 执行return IRQ_RETVAL(IRQ_HANDLED);
}// 模块初始化函数
static int interrupt_irq_init(void)
{int ret;irq = gpio_to_irq(101); // 将 GPIO 转换为中断号printk("irq is %d\n", irq);// 请求中断ret = request_irq(irq, test_interrupt, IRQF_TRIGGER_RISING, "test", NULL);if (ret < 0){printk("request_irq is error\n");return -1;}// 初始化 tasklettasklet_init(&mytasklet, mytasklet_func, 1);return 0;
}// 模块退出函数
static void interrupt_irq_exit(void)
{free_irq(irq, NULL);tasklet_enable(&mytasklet); // 使能 tasklet(可选)tasklet_kill(&mytasklet); // 销毁 taskletprintk("bye bye\n");
}module_init(interrupt_irq_init); // 指定模块的初始化函数
module_exit(interrupt_irq_exit); // 指定模块的退出函数
MODULE_LICENSE("GPL"); // 模块使用的许可证
MODULE_AUTHOR("XXX"); // 模块的作者
2.1运行测试
看到驱动加载之后,可以看到申请的中断号(113)被打印了出来,然后用手触摸连接的屏幕,触发中断服务程序,打印如下图所示:
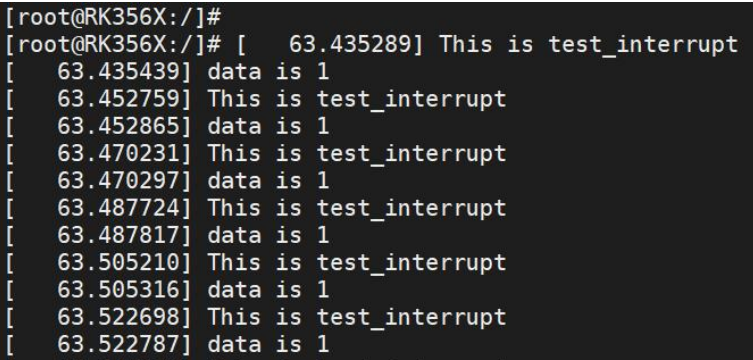
在上图中,可以看到打印中断处理函数中添加的打印“This is test_interrupt”和 tasklet 处理函数中添加的打印“data is 1”,说明成功执行了中断下文 tasklet 处理函数。