边缘人工智能计算机
边缘人工智能计算机
Neousys 科技是工业级坚固型嵌入式计算系统的领先开发商,其产品广泛应用于自动驾驶汽车和机器人平台,例如无人机 (UAV)、无人地面车辆 (UGV) 和无人水面舰艇 (USV)。

NRU-51V+ / NRU-51V
坚固耐用的 NVIDIA® Jetson Orin™ NX/Xavier™ NX GMSL2 摄像头传感器集线器,适用于自动驾驶汽车和远程操作

- 由 NVIDIA® Jetson Orin™ NX 或 Xavier™ NX SOM 提供支持,并捆绑 JetPack 5.1.1
- 坚固耐用,无风扇运行,温度范围为 -25°C 至 60°C
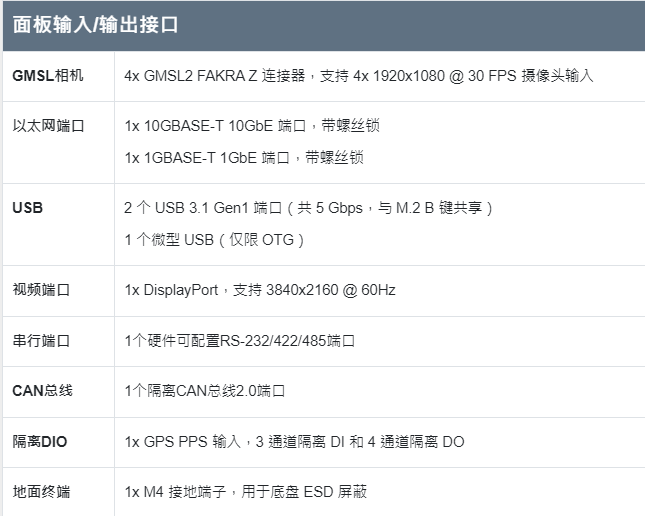
- 通过 FAKRA Z 连接器支持 4 个 GMSL2 汽车摄像头
- 1 个 10GBASE-T 10GbE 和 1 个 1GBASE-T 1GbE 以太网端口
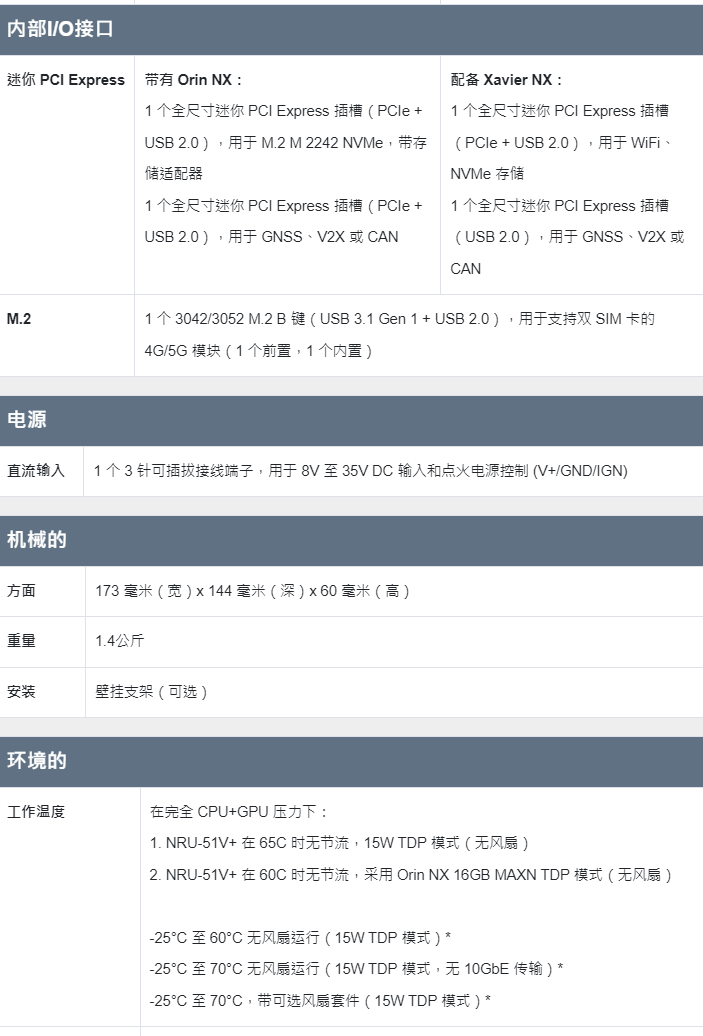
- 2 个 mini-PCIe 插槽,用于 WiFi/GNSS/NVMe/CAN 模块
- 1x M.2 3042/ 3052 B 键插槽,用于 4G/ 5G 移动通信
- 1 个隔离 CAN 2.0、1 个可配置 RS232/422/485 端口和 1 个 GPS PPS 输入
- 8V 至 35V 宽范围直流输入,内置点火功率控制
介绍
NRU-51V 系列是一款坚固耐用的 Jetson Orin™ NX/Xavier™ NX 计算机,支持 GMSL2 摄像头,可充当 ADAS、远程操作、自主移动机器人和自动驾驶汽车的传感器集线器或感知单元。
通过支持 GMSL2 汽车摄像头(包括 TierIV 和英特尔® 实感™ 摄像头等第三方选项),NRU-51V+ 获得了增强的视觉能力,包括高动态范围 (120dB HDR)、自动白平衡 (AWB) 和 LED 闪烁抑制 (LFM) 等高级功能。此外,GMSL2 汽车摄像头的 IP67 防水性能使其在户外应用的部署更加灵活。无论光照条件如何,从阳光明媚的白天到漆黑的夜晚,NRU-51V+ 都能以极低的延迟获得高质量图像。此外,它具有独特的同步机制,能够在微秒级的通道间偏差内同时从四个 GMSL2 摄像头获取图像。它还可以接收 GPS PPS 信号,将图像数据与激光雷达 (LIDAR) 对齐,或同步其他系统上的摄像头。
得益于 NVIDIA® Jetson Orin NX™ SOM 的卓越能效,NRU-51V+ 在其 25W 功率封装内即可提供 100 TOPS 的推理性能。用户可以通过其内置的 10GBASE-T 以太网将原始摄像头图像传输到另一台 GPU 服务器进行感知处理,同时还可以利用其强大的 TOPS 进行实时对象或 ROI 检测。对于远程操作应用,用户可以利用其硬件 H.264/265 视频编解码器,实时编码来自四个 GMSL2 摄像头的视频流,并通过 5G 通信将实时视频以最低延迟传输给远程位置的驾驶员。
GMSL2 接口与 Jetson Orin™ NX 的结合,使 NRU-51V+ 不再仅仅是一台简单的边缘 AI 计算机。凭借车载摄像头带来的更广阔的视野,以及 10GbE、CAN 2.0 和 M.2 等支持 5G 宽带的 I/O 接口,NRU-51V+ 可在移动平台中发挥核心作用,例如作为 ADAS 的传感器中枢、AGV/AMR 的感知单元,或非公路车辆的远程操作控制器。