Motioncam Color S + 蓝激光:3D 视觉革新,重塑工业与科研应用新格局
在工业自动化、科研探索及智能检测等前沿领域,对物体进行高精度、高速度且稳定可靠的三维成像,始终是推动技术进步与效率提升的关键诉求。过往的 3D 成像设备,常因精度欠佳、对复杂材质适应性差、难以应对动态场景等局限,在实际应用中举步维艰。如今,博图Motioncam Color S + 蓝激光强势登场,凭借 “蓝激光核心技术、专利并行结构光、卓越环境适应性” 三大技术王牌,打破行业桎梏,开启 3D 视觉成像的全新篇章。

一、核心技术:蓝激光赋能,颠覆传统 3D 成像
Motioncam Color S + 蓝激光的卓越性能,根源在于其独树一帜的蓝激光技术体系与精密光学构造,从根本上攻克传统 3D 设备的痛点。
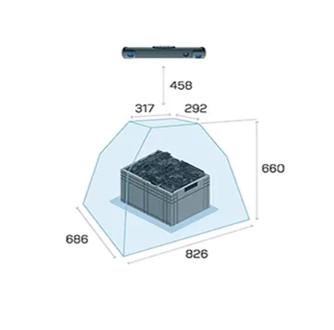
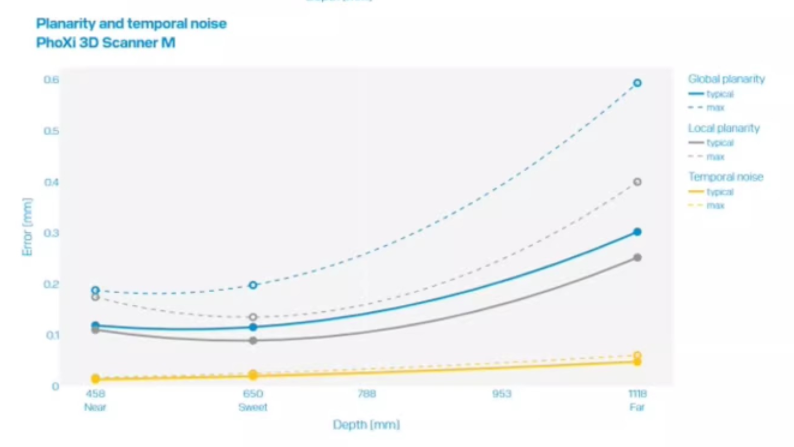
蓝激光技术:微米级精度,洞察细微:相较于传统的红光或普通白光 3D 成像技术,蓝激光(波长处于 450 - 495nm 区间)具备更短的波长,能量集中度更高。搭配设备内置的高分辨率 CMOS 传感器(像素超 200 万),Motioncam Color S + 蓝激光可实现微米级别的三维测量精度,偏差控制在≤5μm。无论是精密工业零部件的微小尺寸检测,像航空发动机叶片的曲面精度测量,还是科研样本的微观结构捕捉,例如生物细胞的立体形态解析,都能精准呈现每一处细微特征,测量数据的重复性误差≤0.1%,远超同类产品平均水平。
2.强环境抗干扰:复杂场景,稳定如一:传统 3D 设备极易受环境光干扰,在强光、杂光环境下成像严重失真,且对物体表面的反光、颜色敏感。Motioncam Color S + 蓝激光借助 “窄带滤波技术 + 自适应曝光控制”,有效过滤各类环境光干扰。即便在强光车间、户外直射光下,或是面对高反光物体,如金属制品、玻璃材质,也能稳定输出高质量成像。在光伏面板检测场景中,可轻松忽略面板表面的强光反射,精准识别电池片上细微的裂纹与尺寸偏差;在建筑外立面测绘时,无需刻意规避光线,即可快速、准确地获取三维数据。
二、多行业应用:从智能制造到前沿科研,全面深度赋能
Motioncam Color S + 蓝激光凭借卓越技术优势,已广泛渗透至工业制造、科研探索、医疗健康、智能交通等多个关键领域,切实解决行业实际痛点。
1.工业制造:精准检测,筑牢品质根基
· 零部件尺寸与缺陷检测:在航空航天、汽车制造、电子精密制造等高精尖行业,Motioncam Color S + 蓝激光可对复杂结构零部件,如飞机涡轮叶片、手机芯片封装体,进行全方位三维尺寸测量。自动将实际零件与设计模型比对,快速识别表面划痕、凹陷、孔洞等各类缺陷,检测效率较传统人工测量提升 10 倍有余,不合格品检出率高达 100%。
2、科研探索:助力前沿,揭示未知奥秘
· 材料力学研究:在金属材料的拉伸、压缩、冲击等力学实验中,Motioncam Color S + 蓝激光可全过程记录材料的三维形变过程,精确分析应力应变分布,助力科研人员深入探究材料的力学性能与断裂机制,为新型材料的研发提供关键数据支撑。
· 3、生物运动分析:在生物力学领域,能够精准捕捉动物或人体的运动轨迹与关节形变,如运动员跑步时膝关节的动态变化、鸟类飞行时翅膀的扇动轨迹,生成高精度三维运动模型,为运动康复研究、仿生设计等提供详实可靠的数据。
选择 Motioncam Color S + 蓝激光:开启精准 3D 视觉新征程
在当下追求 “高精度、高效率、高稳定性” 的时代浪潮中,Motioncam Color S + 蓝激光绝非仅是一台 3D 成像设备,更是助力各行业实现技术飞跃的得力伙伴。无论是提升工业产品品质、加速科研成果转化,还是守护医疗健康、保障交通基建安全,它都能凭借卓越性能与贴心服务,为用户创造无可估量的价值。