MapEX论文详解
文章链接:https://arxiv.org/abs/2311.10517
MapEx 的核心思想是利用先验地图信息(例如简单地图、带噪声的地图或旧地图)来增强在线高精地图(HD Map)的构建,从而提高自动驾驶车辆在复杂环境中的感知能力。以下是论文的主要内容梳理:
研究背景与动机
•高精地图(HD Map)的重要性:HD Map 为自动驾驶系统提供精确的环境信息(如车道线、道路边界、人行横道),对路径规划和决策至关重要。
•传统 HD Map 的局限性:制作和维护高精地图成本高昂,且难以应对道路变化(如施工、改道)。
•在线建图的挑战:仅依靠车载传感器(摄像头、激光雷达)进行实时地图构建("无图"或"轻图"方案)容易受到遮挡、恶劣天气等因素影响,导致地图不完整或错误。
•MapEx 的解决方案:MapEx 框架利用已有的先验地图信息(即使这些地图不完整、有噪声或过时)来辅助和优化当前帧的在线地图构建,显著提升地图的准确性和鲁棒性。
MapEx 核心方法
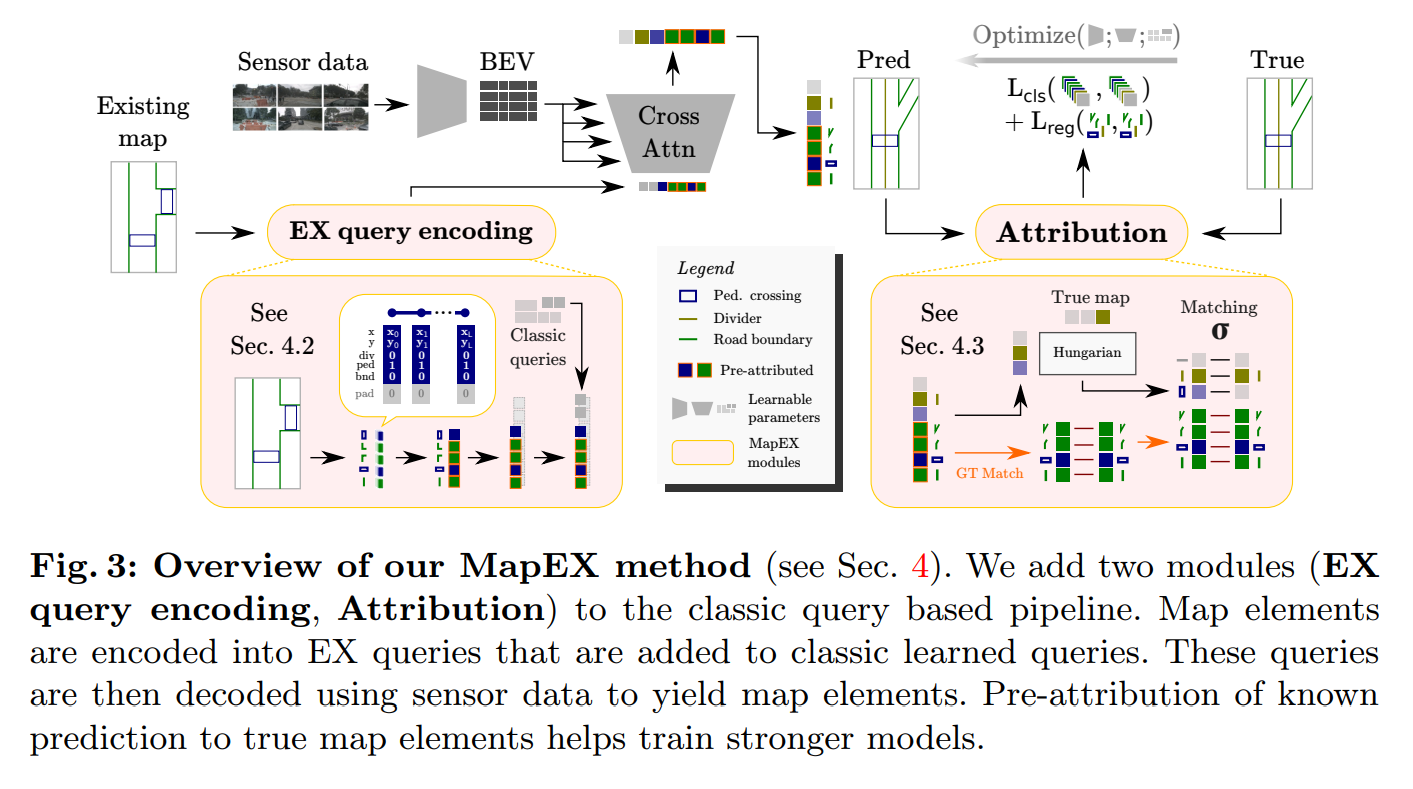
MapEx 基于 MapTRv2 这类基于查询(Query)的端到端矢量化地图构建模型
EX Query
•EX Query(先验查询生成):将先验地图中的每个元素(如车道线)转换为一系列不可学习的查询(EX Query)。这些查询直接编码了先验地图元素的坐标和类别信息,然后与模型本身的可学习查询拼接,一起输入解码器。这使得模型能“知晓”先验地图的存在。
EX Query举例:
假设我们有一段先验地图,其中包含一条车道分隔线。这条分隔线由一系列点构成。
•先验地图元素:车道分隔线 (类别编码: [1, 0, 0],假设三类分别为车道分隔线、道路边界、人行横道)
•采样点数 L:4 (为了示例简单,实际中 L=20)
•采样点坐标:
•点 1: (0.0, 0.0)
•点 2: (2.5, 0.0)
•点 3: (5.0, 0.0)
•点 4: (7.5, 0.0)
•EX Query 维度:假设总维度为 256 维。
那么,为这条车道分隔线生成的 4 个 EX Query 将如下所示(为了清晰起见,用表格表示每个查询的填充方式):
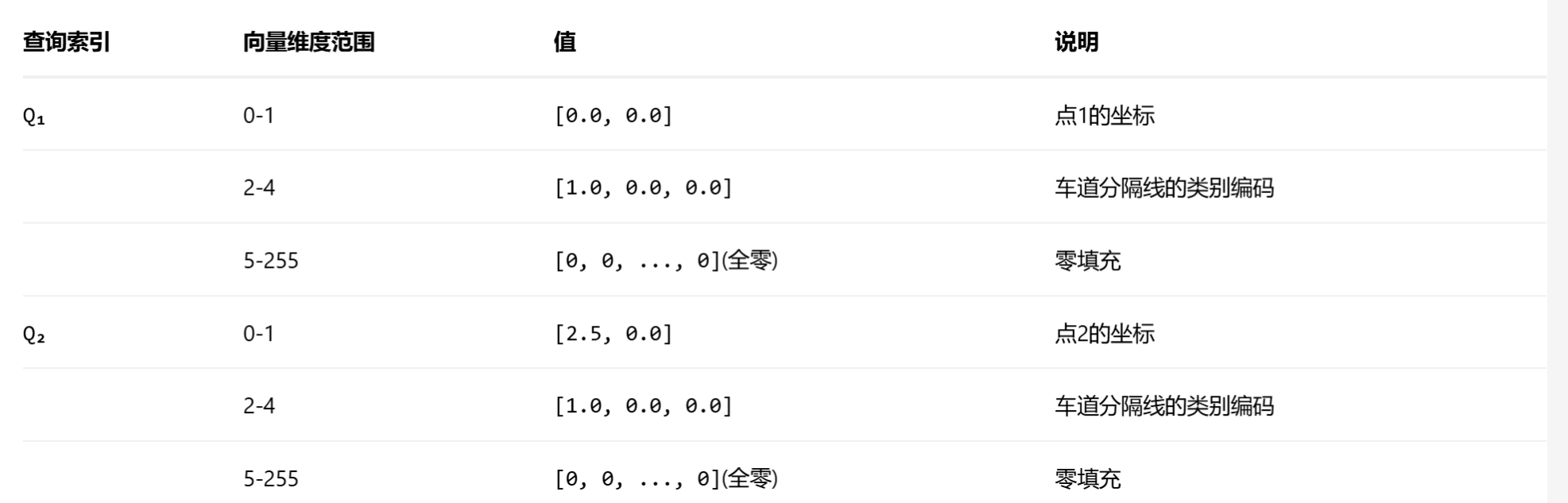
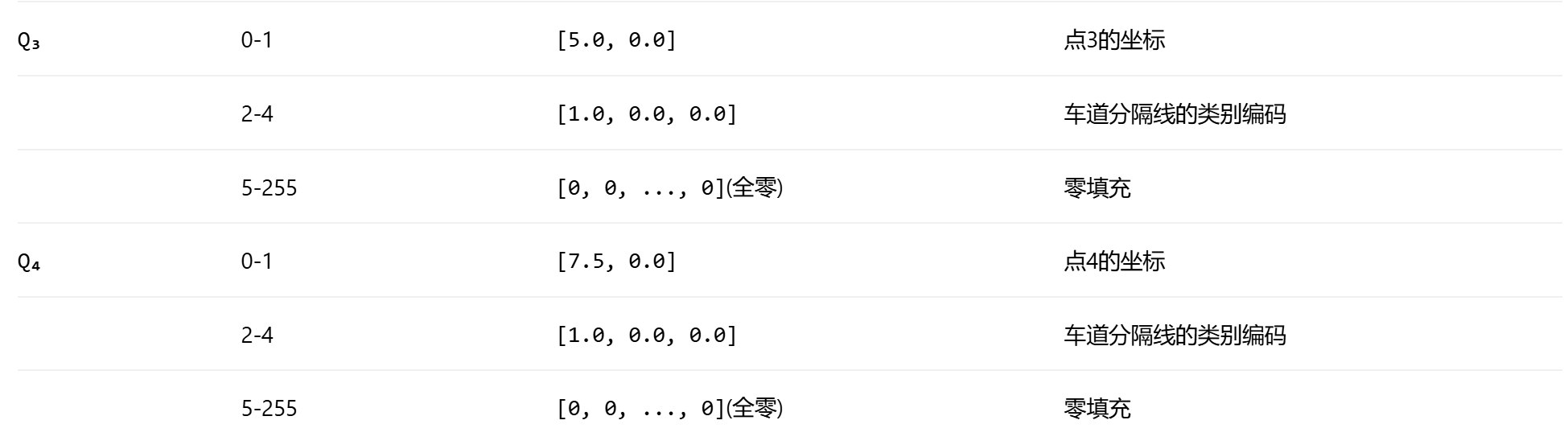
这样,这条先验的车道分隔线就被编码成了 4 个 EX Query。在模型中:
1.这些 EX Query 会与模型自身随机初始化的可学习查询拼接在一起。
2.拼接后的全部查询集合会被送入 Transformer 解码器。
3.解码器通过交叉注意力(Cross-Attention)机制,融合当前的传感器特征(BEV 特征)和这些查询所含的先验信息。
4.最终,解码器输出优化后的地图元素预测。先验信息的存在极大地帮助了模型进行更准确和鲁棒的预测,特别是在传感器感知困难的情况下
可学习Query
可学习Query的初始化:可学习Query是模型随机初始化的一组参数,并在训练过程中通过梯度下降进行优化。它们没有固有的几何意义,负责感知和编码当前帧传感器数据(如图像或点云)中的新地图元素或先验地图中缺失/错误的部分。
查询拼接 (Query Concatenation):在每一帧的处理中,从先验地图生成的所有 EX Query 会与模型自身的可学习Query拼接(Concatenate) 在一起,形成一个更大的查询集合。这个合并后的查询集被送入基于Transformer结构的解码器。
拼接后的查询集进入Transformer解码器后,会通过交叉注意力(Cross-Attention)机制与当前的传感器特征(通常是BEV特征)进行交互。
•EX Query 的作用:由于 EX Query 直接编码了先验元素的几何位置和语义,它们会强烈地引导解码器去关注特征图中对应的区域。这相当于为模型提供了一个“搜索指南”,告诉它“应该在这些大概位置寻找这类地图元素”。对于先验地图中正确或部分正确的元素,EX Query 能帮助模型快速锁定并精确调整其位置和形状。
•可学习Query的作用:可学习Query则灵活地探索整个特征图,寻找那些先验地图中没有包含的新元素(如新增的车道)、或者先验地图中有但当前传感器未能充分感知到的元素。它们负责处理先验信息与当前观测之间的差异和变化。
所有查询之间还会通过自注意力(Self-Attention)机制进行交互,这使得 EX Query 和可学习Query能够相互通信和协调。例如,一个可学习Query感知到的新元素信息可能会传递给位置相近的 EX Query。
预匹配(Pre-Attribution)
在训练时,先将 EX Query 对应的预测与真实标签(GT)进行预匹配,锁定那些先验地图中正确或部分正确的部分。剩余的预测和真实标签再通过匈牙利算法进行匹配。这降低了匹配算法的复杂度,并强制模型学会利用先验信息。
为了让模型学会如何高效地利用这两种查询,MapEx 在训练过程中引入了一个关键机制:预匹配。
-
标准匹配(匈牙利算法):在一般的端到端地图构建模型(如MapTRv2)中,所有的预测(由查询产生)和真实标签(GT)之间会通过匈牙利算法进行二分匹配,以确定最优的分配关系,从而计算损失。
-
MapEx的预匹配:在执行全局的匈牙利匹配之前,MapEx 先固定地将 EX Query 所产生的预测与真实标签进行匹配。这一步锁定了那些先验地图中已经存在且正确的部分。
-
剩余匹配:完成预匹配后,剩下的预测(主要由可学习Query产生)和未被匹配的真实标签再通过匈牙利算法进行匹配。
这种方法降低了匈牙利算法的匹配复杂度和难度,因为它已经提前处理掉了一部分明确的匹配关系。更重要的是,它强制模型去学习可学习Query的“职责”:即专注于补全先验地图中缺失的内容以及修正错误的部分。
推理
在模型训练完成后进行推理(即模型部署应用)时:
•EX Query 继续提供先验信息,引导模型生成稳定、符合先验知识的预测。
•可学习Query则根据当前的传感器输入,对先验信息进行验证、修正和补充。例如:
•如果先验地图中某个车道线位置有轻微偏差,可学习Query和EX Query共同作用可能会输出一个更精确的位置。
•如果道路结构发生了变化(如新增了车道),可学习Query将负责检测并生成这些先验中不存在的元素。
•如果先验地图中的某个元素在当前帧中被严重遮挡或不存在,对应的EX
Query可能无法产生高置信度的输出,模型则会更多地依赖可学习Query的感知结果。
先验地图的类型
论文探讨了三种现实且合理的先验地图场景:
•场景1:简单地图:只有道路边界,缺乏车道线和人行横道等细节。
•场景2:带噪声的地图:地图元素的位置存在偏移或误差。
•场景3:过时的地图:地图未能反映最新的道路变化(如新增或删除的车道)。
实验结果
在 nuScenes 数据集上的实验表明,MapEx 能显著提升在线建图性能:
•大幅提升指标:相比 MapTRv2 等基线模型,MapEx 在平均精度(mAP)上取得了显著提升,例如在带噪声地图的场景下,mAP 提升了 38%(相比 MapTRv2)和 16%(相比之前的 SOTA)。
•强大的泛化性:在各种不完美的先验地图场景下,MapEx 均能一致地提升性能,证明了其有效性和鲁棒性。
意义与贡献
•为“无图”方案提供新思路:MapEx 证明了巧妙地利用先验信息(即使不完美)可以极大增强实时地图构建的可靠性,是迈向真正强大“无图”自动驾驶的关键一步。
•实用的框架:其提出的 EX Query 和预匹配机制是即插即用的模块,可以较容易地集成到其他基于查询的在线建图模型中。
•开源促进研究:代码开源有助于学术界和工业界进一步研究和应用该方法。