自动驾驶中的传感器技术45——Radar(6)
本文详细介绍4D雷达相关解决方案,4D雷达关键词:4D Imaging Radar
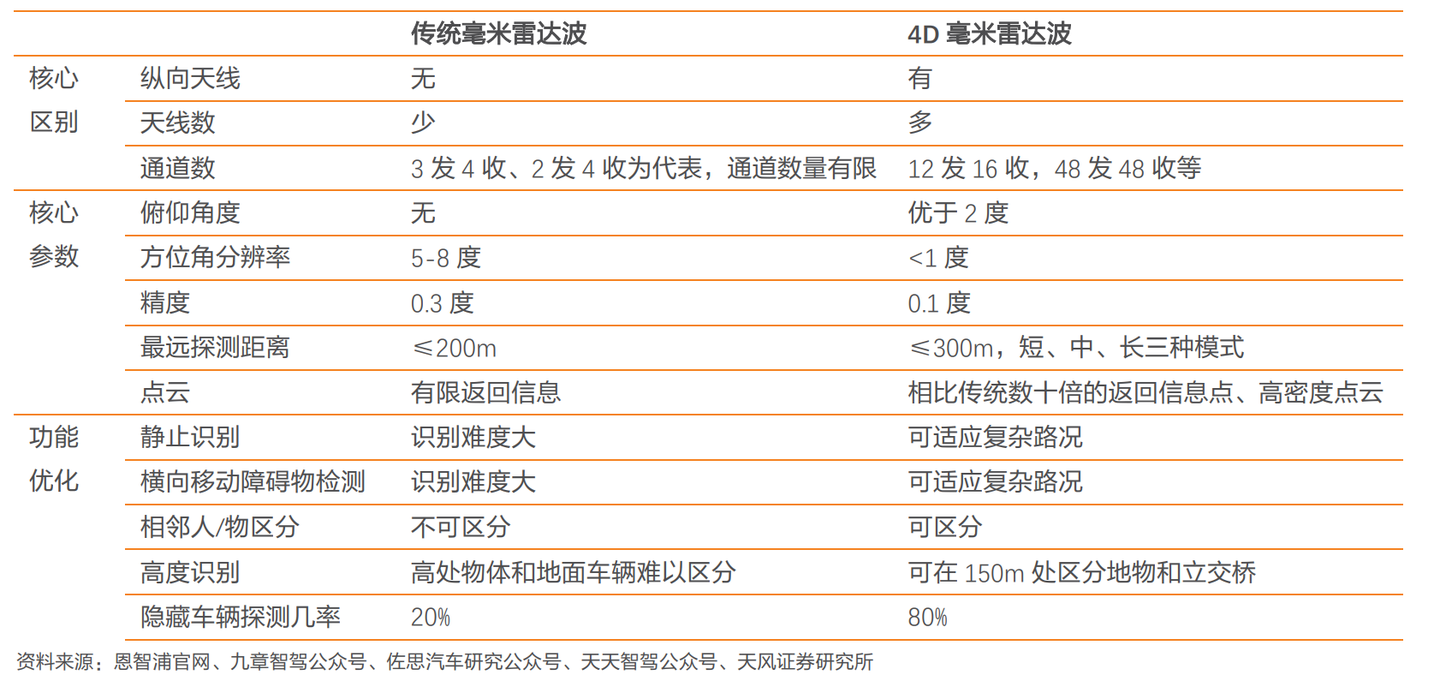
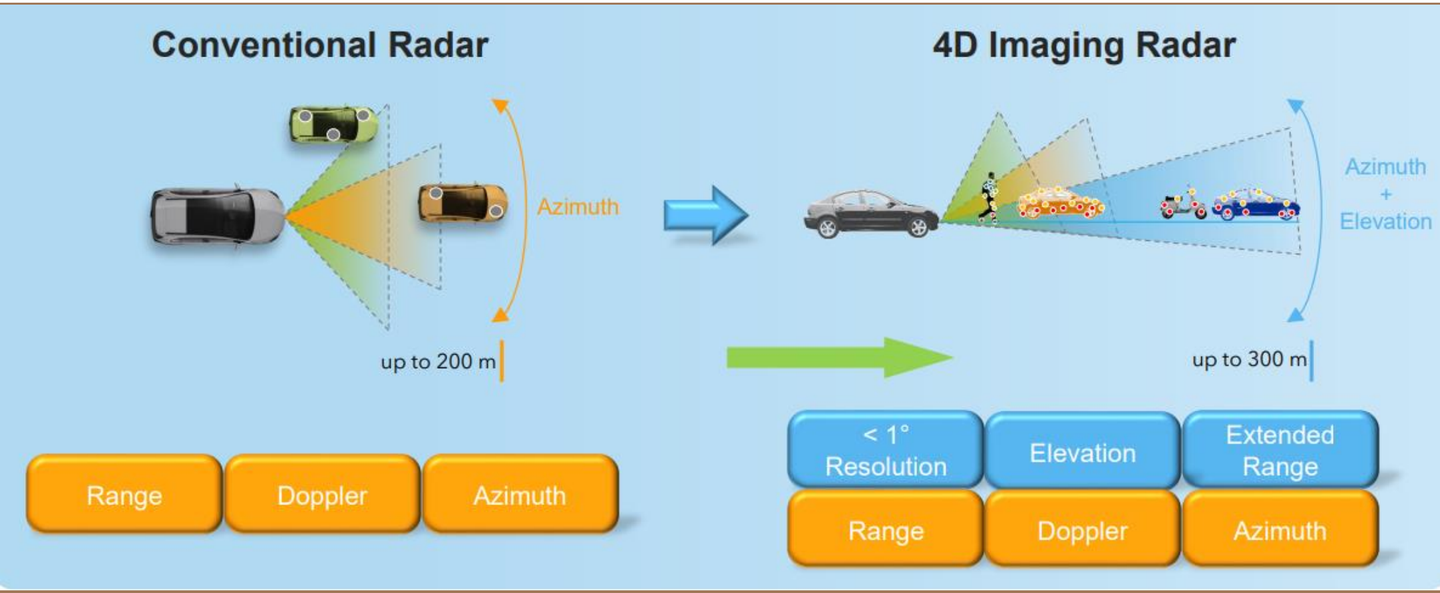
1、4D雷达特点

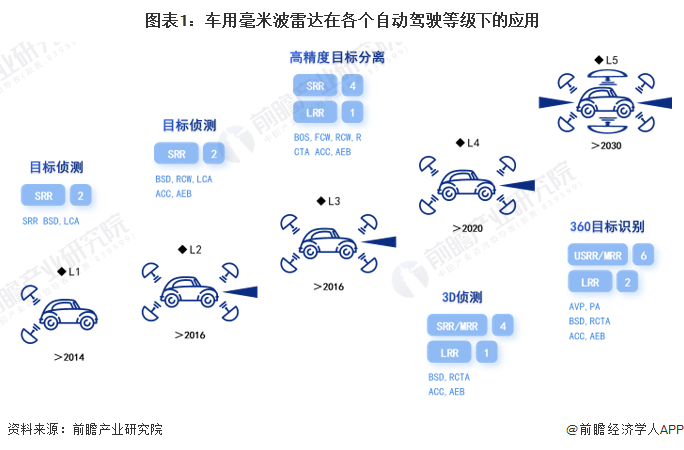
Ref:https://pdf.dfcfw.com/pdf/H3_AP202309071598013225_1.pdf
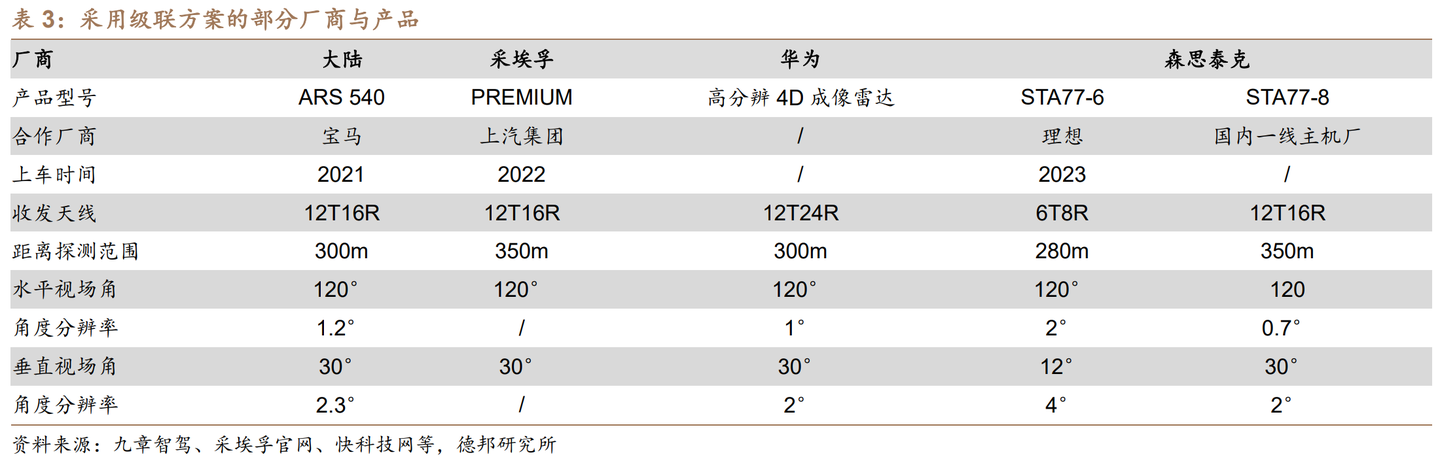
2、传统三大家的4D雷达解决方案
NXP
| MCU | 说明 | MMIC | 说明 |
|---|---|---|---|
| S32R29x | 支持2级联(6T8R) | TEF82xx(3T4R) | 3T4R的单芯片MMIC,可级联 |
| S32R41 | 支持2级联(6T8R或8T8R) | TEF????(8T8R) | 某8T8R的单芯片MMIC,可级联 |
| S32R45 | 支持4级联(12T16R) | ||
| S32R43 | 支持2级联(16T16R) | ||
| S32R47 | 支持3级联(24T24R) |
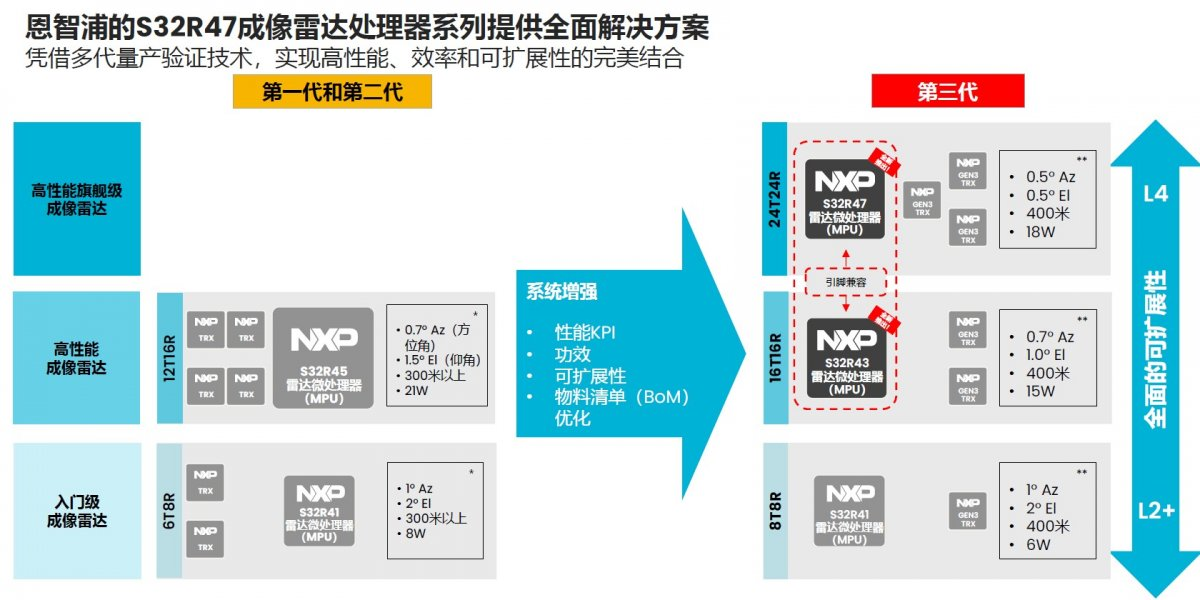
Ref:https://www.eet-china.com/news/202507158519.html
TI
| MCU | 说明 | MMIC | 说明 |
|---|---|---|---|
| AM2732R | 支持2级联(6T8R) | AWR2243(3T4R) | 3T4R的单芯片MMIC,可级联 |
| AM2752x | 支持2级联 | AWR2188(8T8R) | 8T8R的单芯片MMIC,可级联 |
| TDA4x | 支持4级联 | ||
| TDA4x Plus | 支持4级联 |
Infineon
| MCU | 说明 | MMIC | 说明 |
|---|---|---|---|
| TC39xA | 支持2级联(6T8R) | CTRX8161(3T4R) | 3T4R的单芯片MMIC,可级联 |
| TC45x | CTRX8181(4T4R) | 4T4R的单芯片MMIC,不能级联 | |
| CTRX8191F(4T4R) | 8T8R的单芯片MMIC,可级联 |
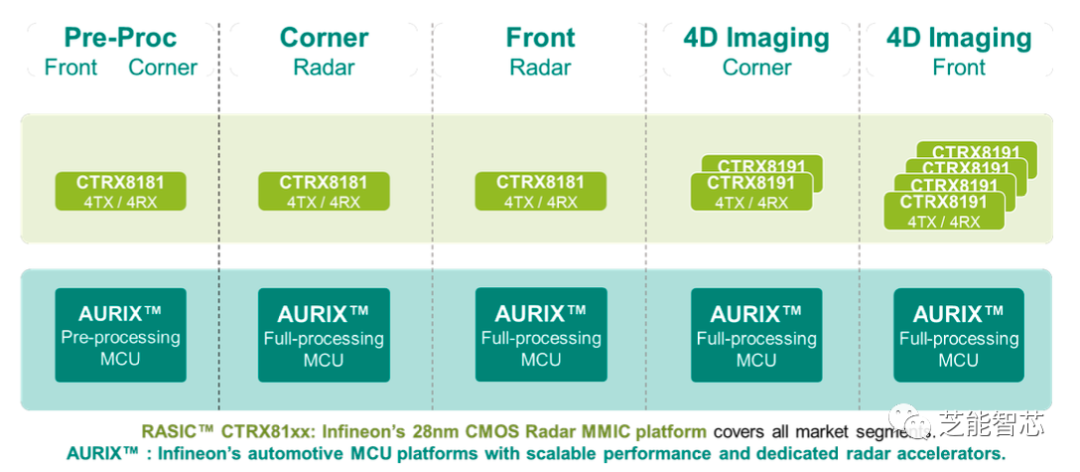
Ref:高性能与复杂级联系统的77GHz毫米波雷达
趋势小结
-
8T8R是一个趋势;
-
增加4D雷达本身的算力是一个趋势;
-
4级联是一个趋势;
-
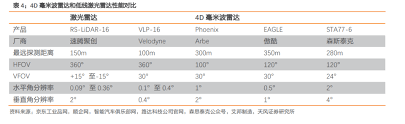
2级联对比传统的3发4收可能的优缺点: 作用距离显著增加,业内整体水平提高到接近300m(对小汽车); 提供了更好的水平角和俯仰角分辨率,方位角分辨率从3°提高到2°,俯仰角具备了3°的分辨率;
-
4级联对比2级联的6发8收可能的优缺点:提供了更好的水平角和俯仰角分辨率,方位角分辨率从2°提高到1°,俯仰角分辨率从3°提高到2.5°;作用距离提升到300m+;
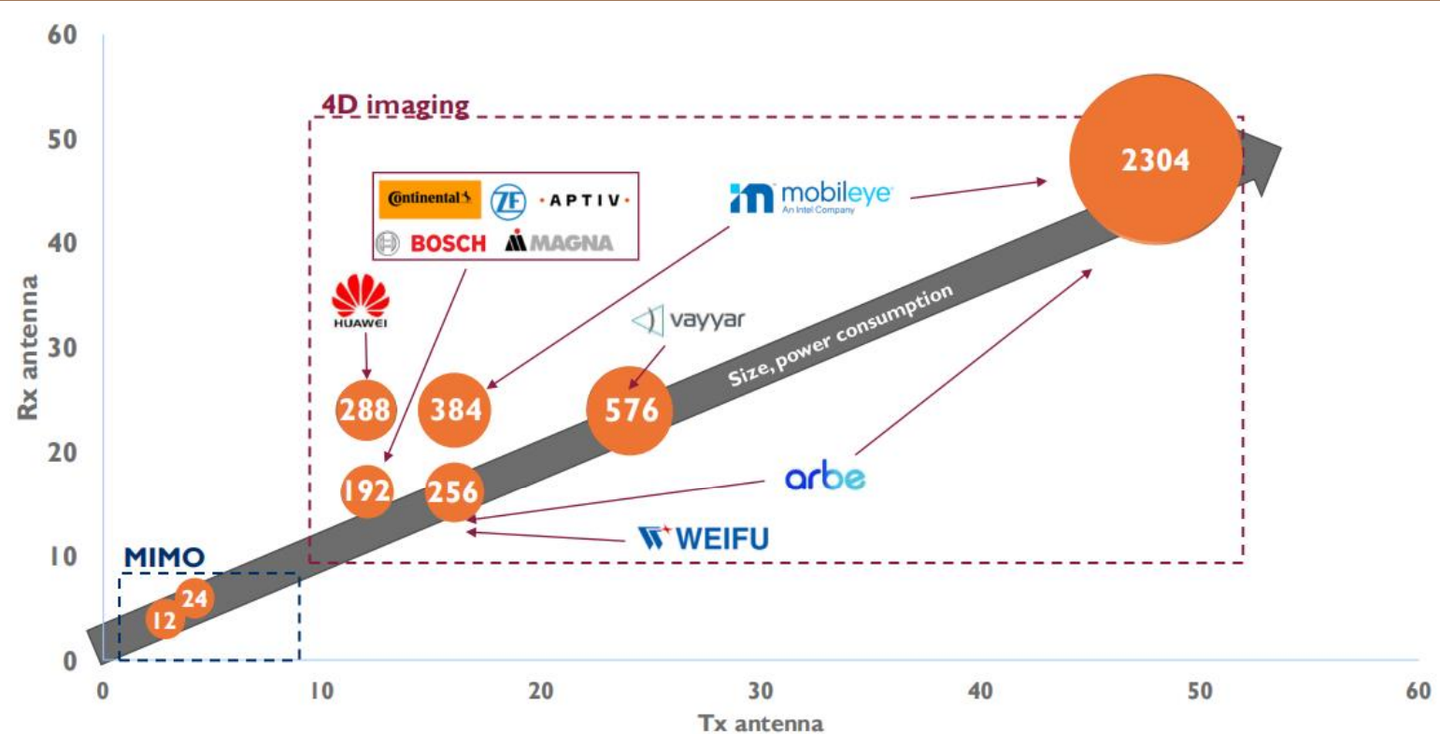
3、新势力4D雷达解决方案
下图是新势力4D雷达解决方案汇总

Vayyar
Vayyar成立于2011年,旨在通过“全方位”4D传感器彻底改善车辆安全性和成本。利用其芯片上雷达(Radar-on-Chip,RoC)平台,Vayyar创造了一个突破性的车辆安全解决方案,用一个芯片可以取代十几个其他传感器,且不需要昂贵的激光雷达和摄像头。
这款高性能 4D 成像片上雷达 (RoC) 支持多达 48 个收发器(24T24R),可提供超越标准 79 GHz 汽车雷达解决方案的卓越分辨率。它提供无与伦比的方位角-仰角视场,带来丰富的高度和深度感知,零最小距离和无盲区,即使在高速行驶下也能实现全面的实时监控。
注意:图3中关于Vayyar的收发通道数有误。
Ref:https://vayyar.com/auto/technology/79ghz/
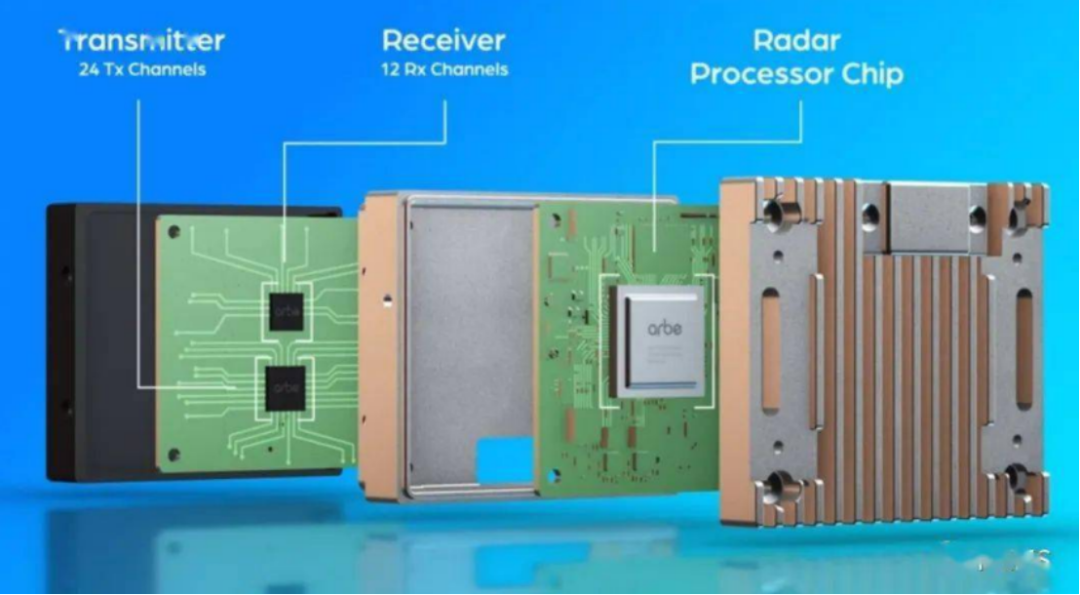
Arbe
Arbe 芯片组的海量通道阵列使下一代雷达能够将 L2+ 提升到更高的安全级别,以低功耗和低成本实现可靠的自主性。
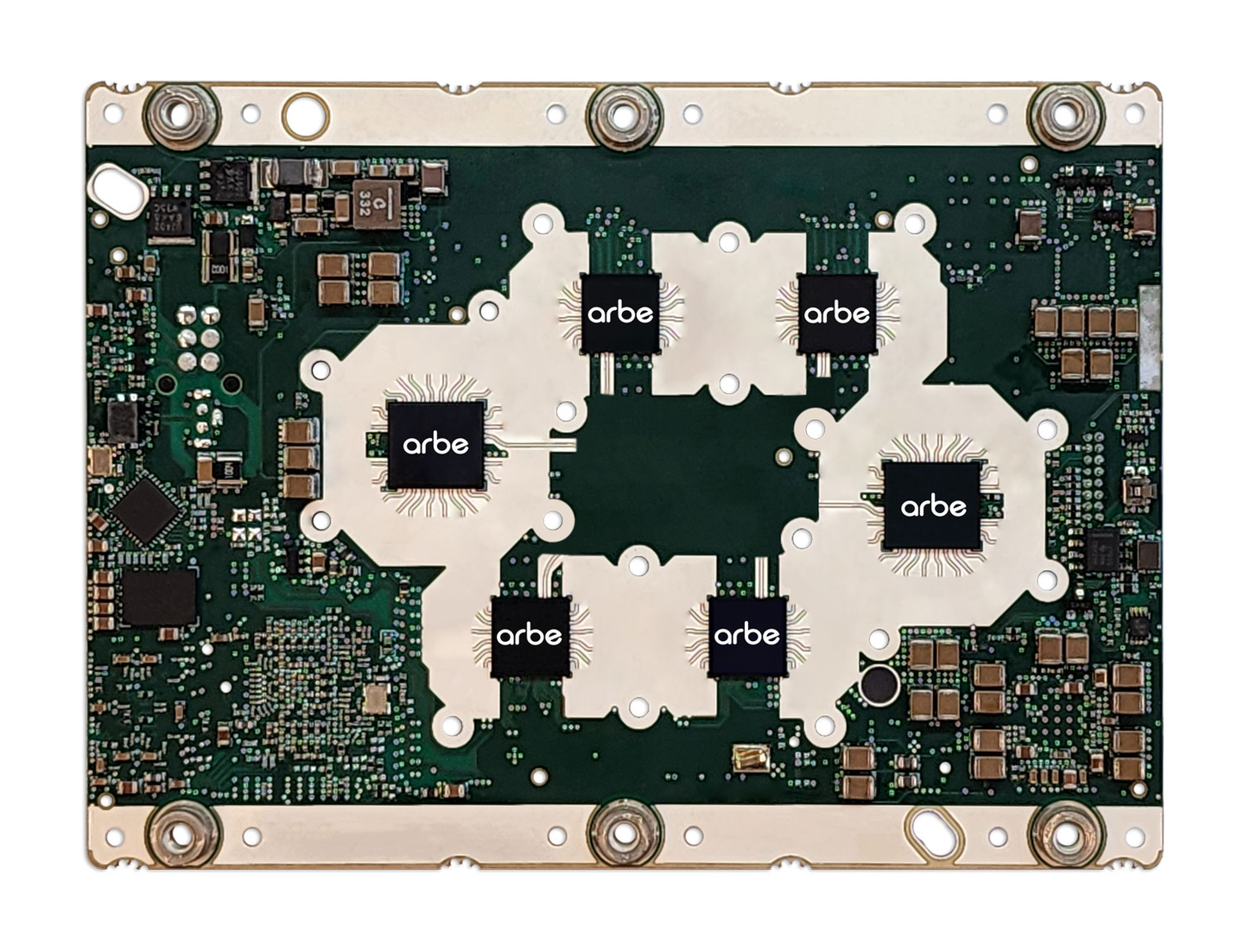
Arbe 的专利处理器芯片集成了雷达处理单元 (RPU) 架构和嵌入式雷达信号处理算法,可转换海量原始数据,同时保持较低的硅片功耗。该汽车级片上系统 (SOC) 包括:安全处理器、安全模块、双核 DSP 和应用处理器。
-
处理来自 2,304 个虚拟通道的实时数据
-
以每秒 20 帧的速度提供 >10K 次检测
-
3Tbps 等效处理吞吐量
-
包含 DSP 内核以适应 OEM 算法
-
点云和对象列表输出
Arbe 专有的汽车级接收芯片采用最新的射频处理技术,采用全新的 FDSOI CMOS 工艺 22FDX。该芯片专为支持 TD-MIMO 而设计,在灵敏度、通道隔离度和噪声系数方面均拥有业内最佳的性能。Arbe 以市场上最低的单通道成本实现了最先进的毫米波接收性能。该接收芯片包含 12 个输入通道,可用于 12 至 48 个接收通道的系统。
Arbe 专有的汽车级发射芯片采用最新的射频处理技术,采用全新的 FDSOI CMOS 工艺 22FDX。该芯片专为支持 TD-MIMO 而设计,并拥有一流的输出功率和功耗性能。Arbe 以市场上最低的单通道成本实现了最先进的毫米波发射性能。该发射芯片包含 24 个通道,可用于 24 至 48 个接收通道的系统,并支持 6 个通道并行进行波束赋形和转向。
以下是两款基于Arbe芯片组方案的雷达
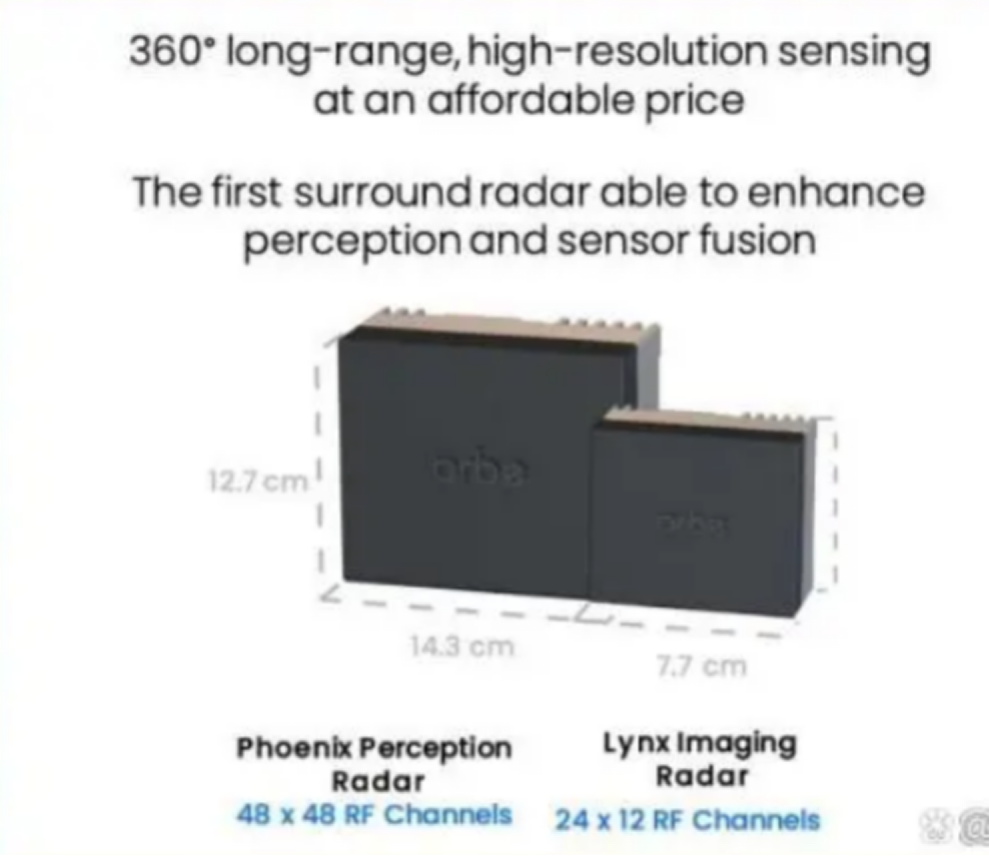

Ref:https://arberobotics.com/chipset/
Uhnder
Uhnder 的数字雷达具有一流的精度,能够在全天候和光照条件下感知近距离和远距离的移动或静止物体(无论大小),同时还能减轻与其他雷达之间的相互干扰。

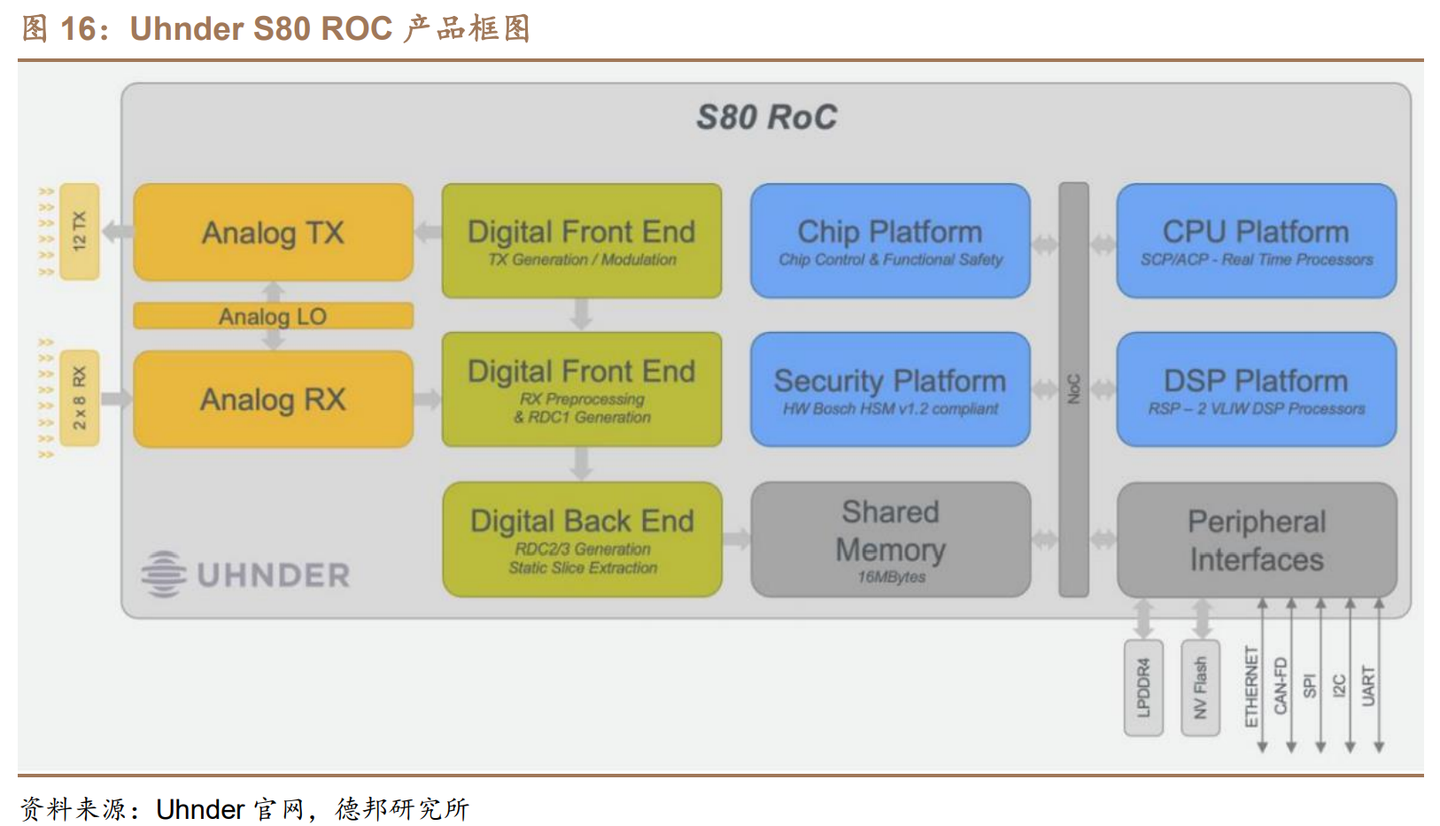
S81:Up to 96 Virtual Receive Channels (VRx) – True MIMO • 8 Receive Antenna Channels (Rx) • Up to 12 Transmit Antenna Channels (Tx)
S80:192 Virtual Receive Channels (VRx) • 2x8 Receive Antenna Channels (Rx) • 12 Transmit Antenna Channels (Tx) • 96 VRx with True MIMO
Uhnder 的雷达芯片采用相位调制连续波 (PMCW),PMCW 的一个优点是,该架构不存在距离多普勒模糊。PMCW 雷达的距离响应类似于图钉,这意味着可以同时实现高距离和多普勒分辨率。PMCW 的波形生成非常简单:双相调制的实现非常简单。
Uhnder 的设计始于码域中用于 MIMO 的无干扰代码,例如用于通信的码分多址 (CDMA)。这是一种强大的检测方法,具有更高的角度分辨率,可以清晰地识别一定距离内靠近的两个物体。他们使用 CDMA 代码来调制 76 GHz 至 81 GHz 之间的载波。凭借这种数字代码调制 (DCM) 技术,他们比 FMCW 具有多项优势。其中一个优势是,对于芯片的模拟部分,对于相同数量的通道,Uhnder 的面积比大多数竞争对手小 8 到 10 倍。另一个优势是,由于它们是相干的并使用码域分集,因此它们具有 12 个发射通道和 16 个接收通道,能够获得 192 个虚拟接收器 (VRX),此外,它们能够对两组天线进行时间复用,以实现方位角和仰角剖面的覆盖。
它们的设计还能检测来自多个其他雷达系统的干扰。CDMA 格式允许多个发射器/接收器相互不干扰。这一点尤其重要,因为进入 2022 年至 2024 年,将会有许多汽车配备雷达。PMCW 雷达的另一个关键优势是它使用二进制序列,通过代码/波形设计实现 TX 正交性。参考文献 4 中的论文证明了这一优势,该雷达采用 4×4 PMCW MIMO 雷达,可以检测到雷达截面 (RCS) 分别为 5 和 20 dBm的两个目标,距离相同(相同距离段),但角度不同,角度分辨率较高。
该雷达以两种模式运行:MIMO 模式,在此模式下,它们向所有发射器发射不同的代码,并且可以在所有接收器中同时接收这些代码。由于 PMCW 使用二进制符号,因此 MIMO 雷达具有优势,如果它们同时发射信号,则需要不同的 TX 天线上近乎完美的正交波形,这对于在驾驶场景中快速照亮物体是必需的。二进制无干扰代码使正交性成为可能4。他们还可以在相控阵模式下操作芯片,在此模式下,它们对发射器进行数字相位调整,以便在发射器之间发送相同的代码,从而实现相控阵和波束控制。
芯片上具有很高的可编程性,因为他们牺牲了模拟的简单性,以增强处理能力,从而提高了灵活性。该公司声称这是首款软件定义雷达。它拥有许多可在软件中配置的功能,并且片上集成了一些非常强大的DSP,客户可以根据需要进行编程,从而实现产品的差异化。这种灵活性从模拟开始,一直延伸到软件。
Ref:https://www.uhnder.com/products/
Ref:https://www.ednasia.com/a-digital-mmw-radar-ic-for-automotive-use/
Mobileye
图3中的Mobileye radar芯片有误,是其Lidar芯片

从上图可以看到,Mobileye用其雷达芯片组搭建了一个48T48R的雷达,并给出了相关指标参数。
Ref:Mobileye 真的不行了吗?_文章_新出行
Ref:Mobileye’s imaging radar takes the wheel | Mobileye Blog
小结
48发48收 和 24发12收 对比4片级联的12发16收可能的优缺点:更好的水平角和俯仰角角分辨率,48发48收能达到水平分辨率1.25°,俯仰分辨率1.7°;24发12收能达到水平分辨率2°,俯仰分辨率3°;Uhnder方案目前国内在做Uhnder方案的主要是欧菲光,实现12发16收
Ref:https://36kr.com/p/1916149583486985