《UE5_C++多人TPS完整教程》学习笔记49 ——《P50 应用瞄准偏移(Applying Aim Offset)》
本文为B站系列教学视频 《UE5_C++多人TPS完整教程》 —— 《P50 应用瞄准偏移(Aim Offset)》 的学习笔记,该系列教学视频为计算机工程师、程序员、游戏开发者、作家(Engineer, Programmer, Game Developer, Author) Stephen Ulibarri 发布在 Udemy 上的课程 《Unreal Engine 5 C++ Multiplayer Shooter》 的中文字幕翻译版,UP主(也是译者)为 游戏引擎能吃么。

文章目录
- P50 应用瞄准偏移(Aim Offset)
- 50.1 在蓝图中应用瞄准偏移
- 50.2 使用 C++ 代码驱动瞄准偏移
- 50.3 Summary
P50 应用瞄准偏移(Aim Offset)
本节课我们将对创建好的瞄准偏移进行应用,这包括在动画蓝图中使用相关变量去驱动瞄准偏移。

50.1 在蓝图中应用瞄准偏移
-
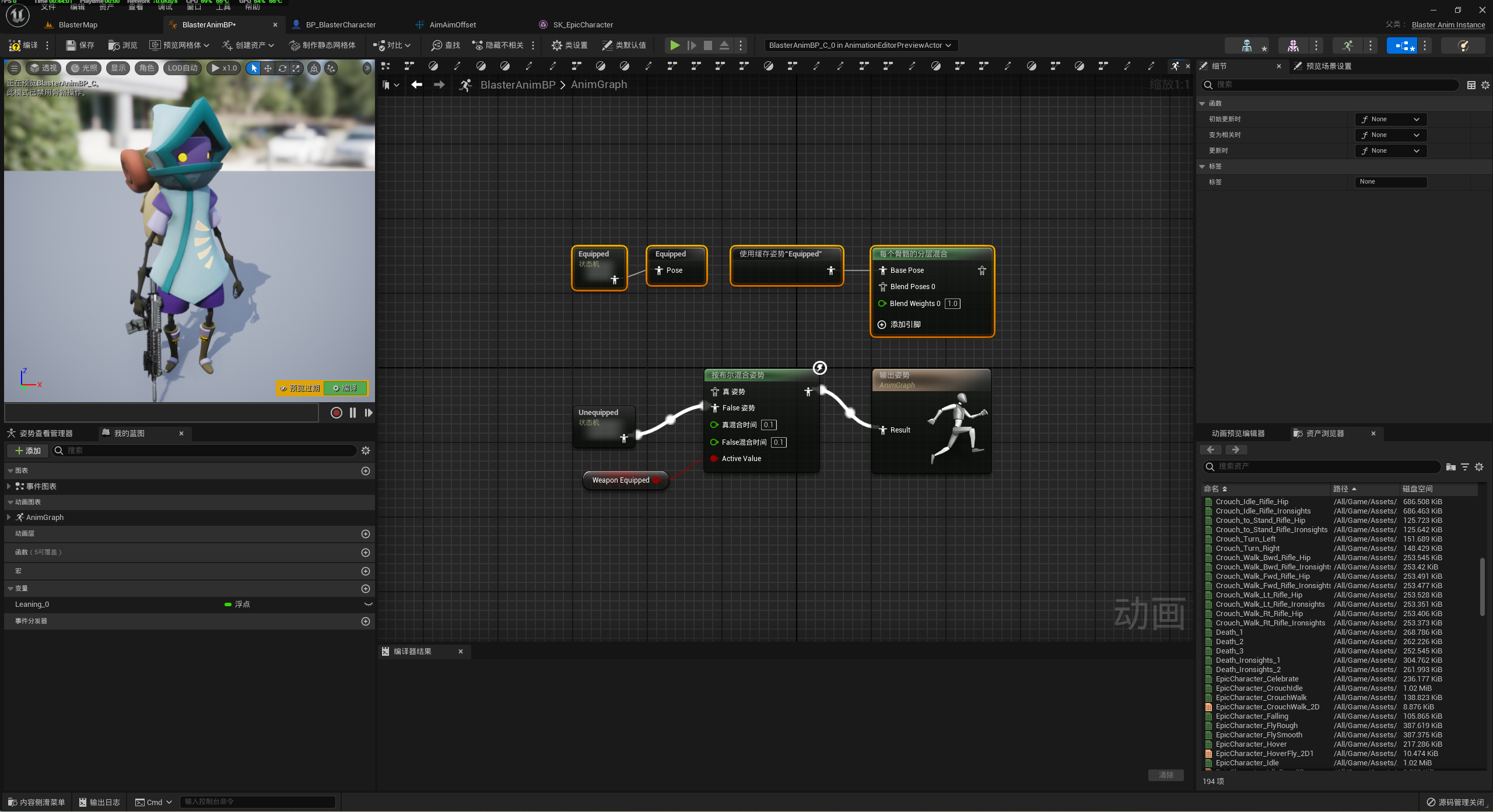
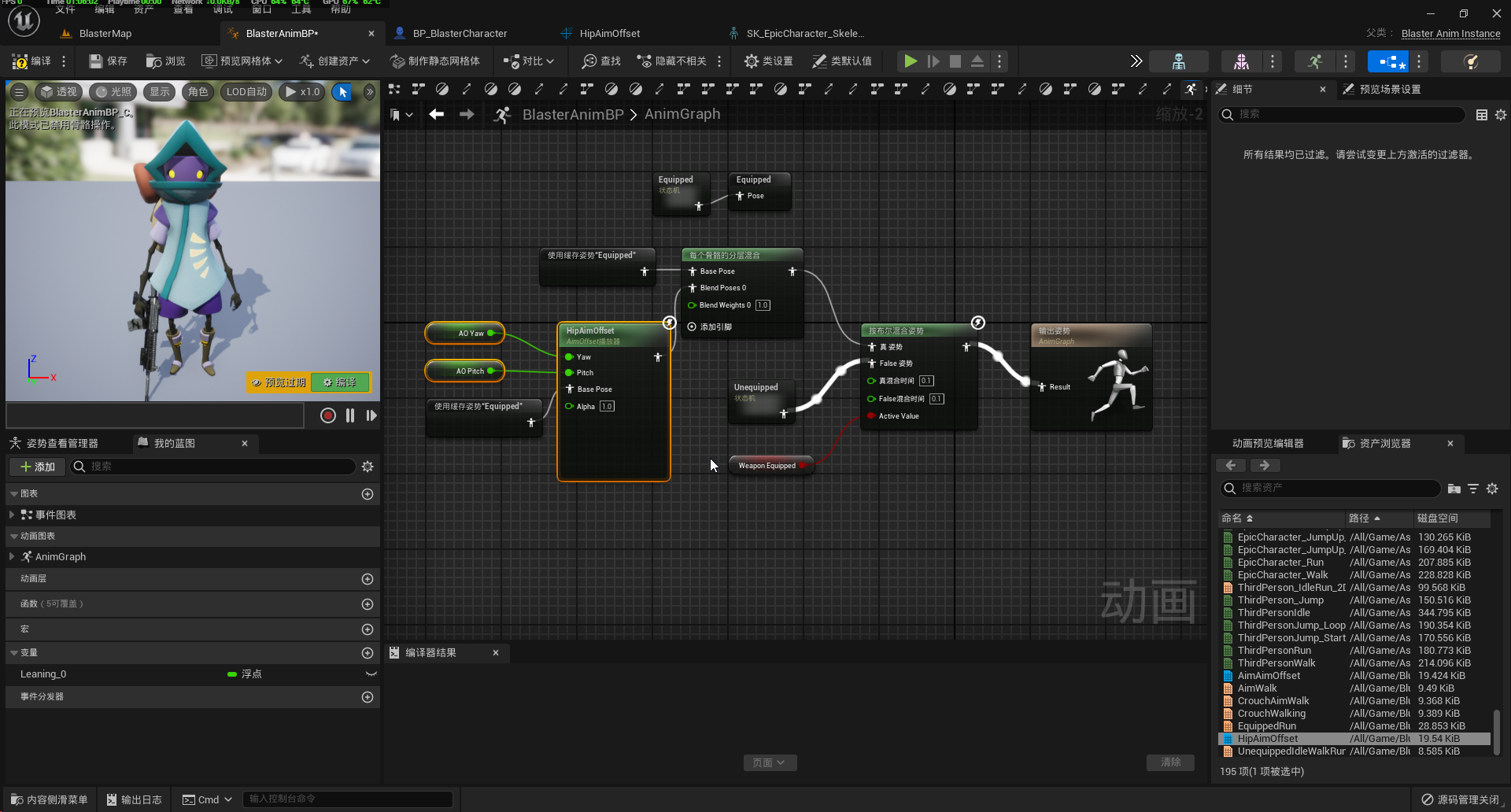
在 “
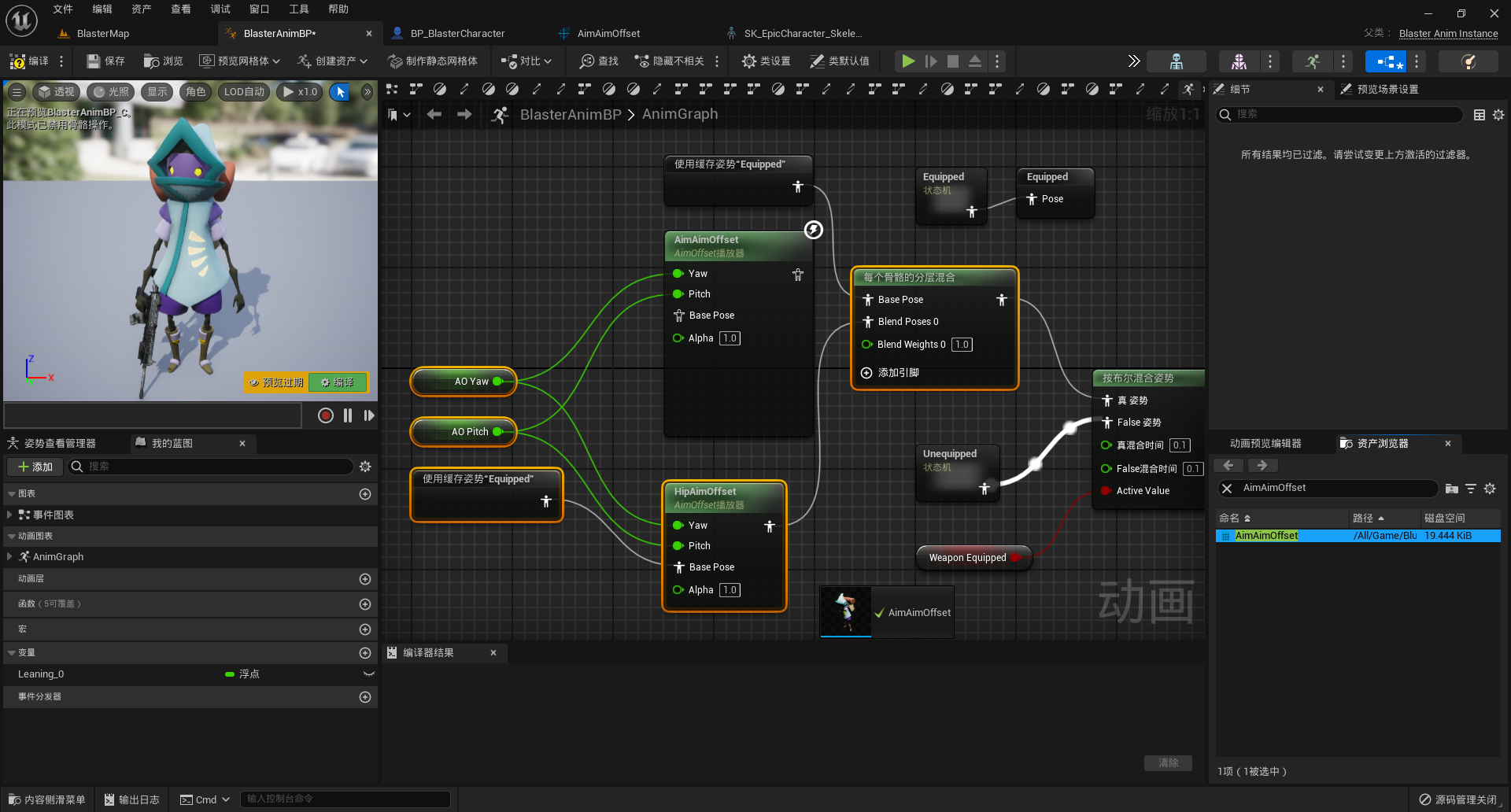
BlasterAnimBP” 的 “AnimGraph” 蓝图面板,添加蓝图节点 “新保存的缓存姿势”(New Save cached pose),将其重命名为 “Equipped”,并与原先的 “Equipped” 状态机节点相连,这样我们就可以在蓝图的多个位置通过添加蓝图界定啊 “使用缓存姿势“Equipped”(Use cached pose ‘Equipped’)” 节点来使用 “Equipped” 状态机节点。 -
每个骨骼的分层混合(Layered blend per bone)
-
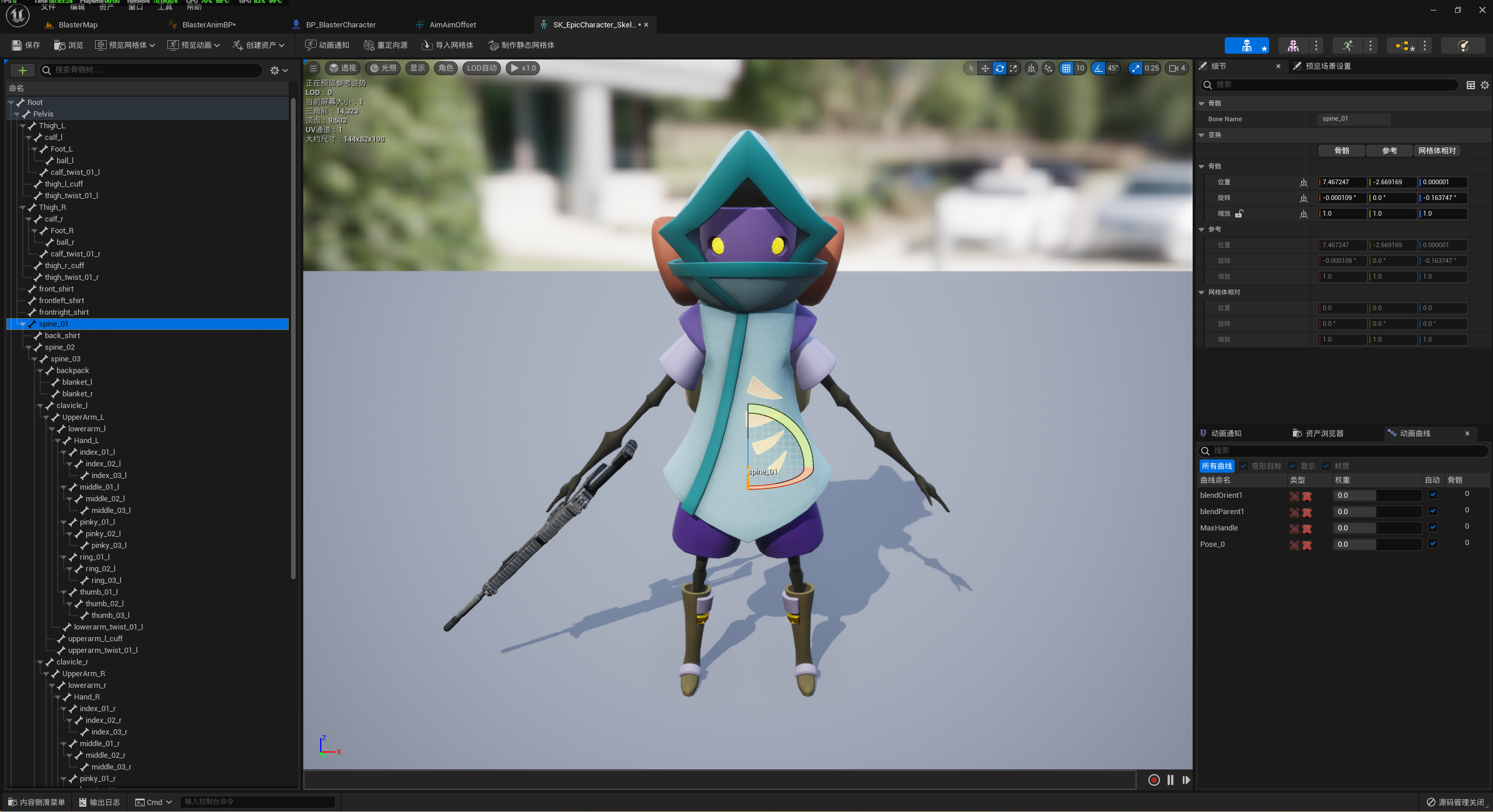
在骨骼 “
SK_EpicCharacter_Skeleton” 中,“spine_01” 是分开上下半身的骨骼节点(spine_01 is what separates the lower half from the upper half of the body),因此我们选择这个骨骼节点在 “每个骨骼的分层混合” 蓝图节点中进行混合。
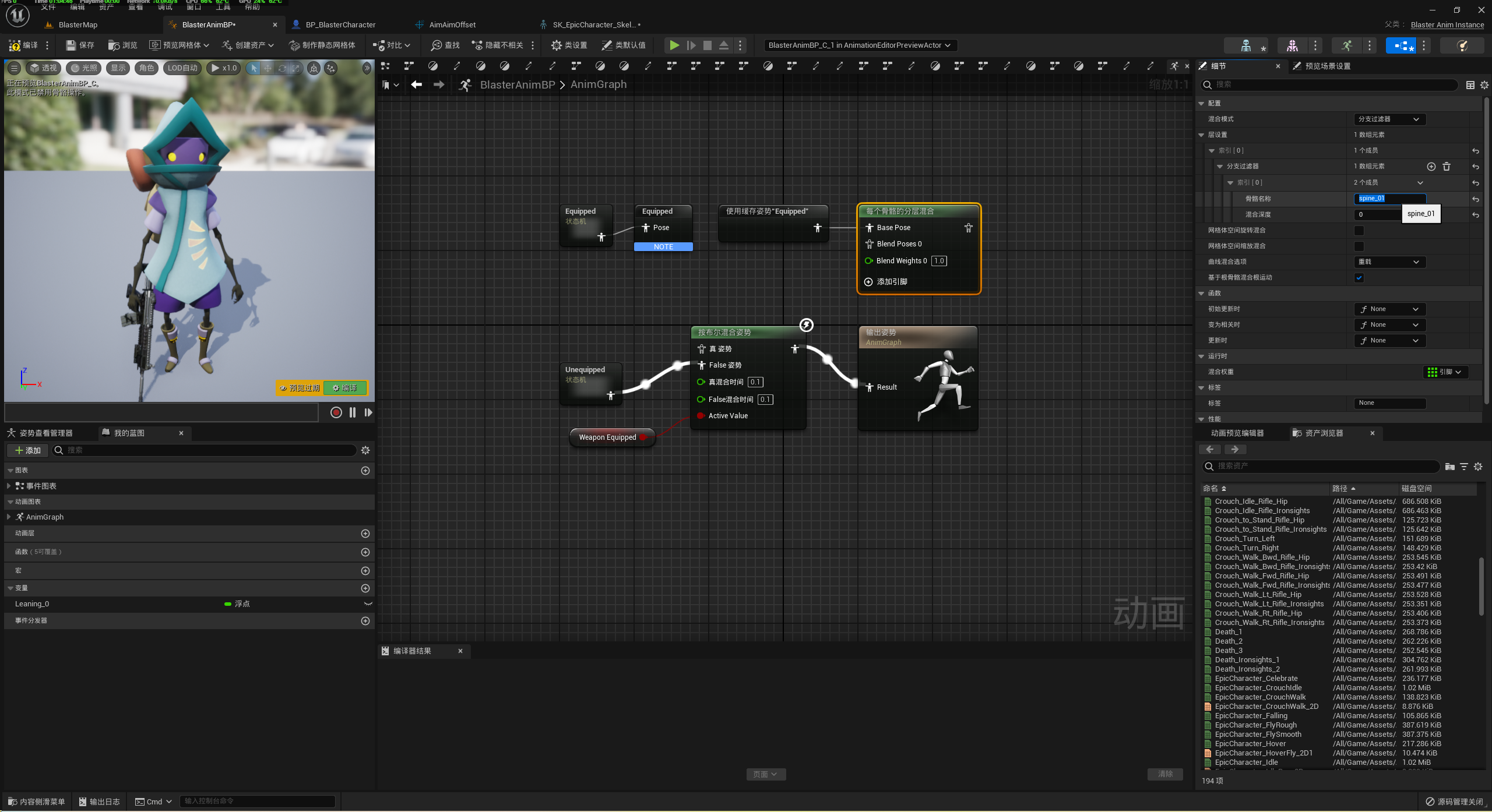
-
选择 “每个骨骼的分层混合” 蓝图节点,在右侧细节面板中展开 “层设置”(Layer Setup),接着展开 “索引 [0]”(Index [0]),然后再展开 “分支过滤器”(Branch Filters)、“索引 [0]”(Index [0]),设置 “骨骼名称”(Bone Name)为 “
spine_01”。
-
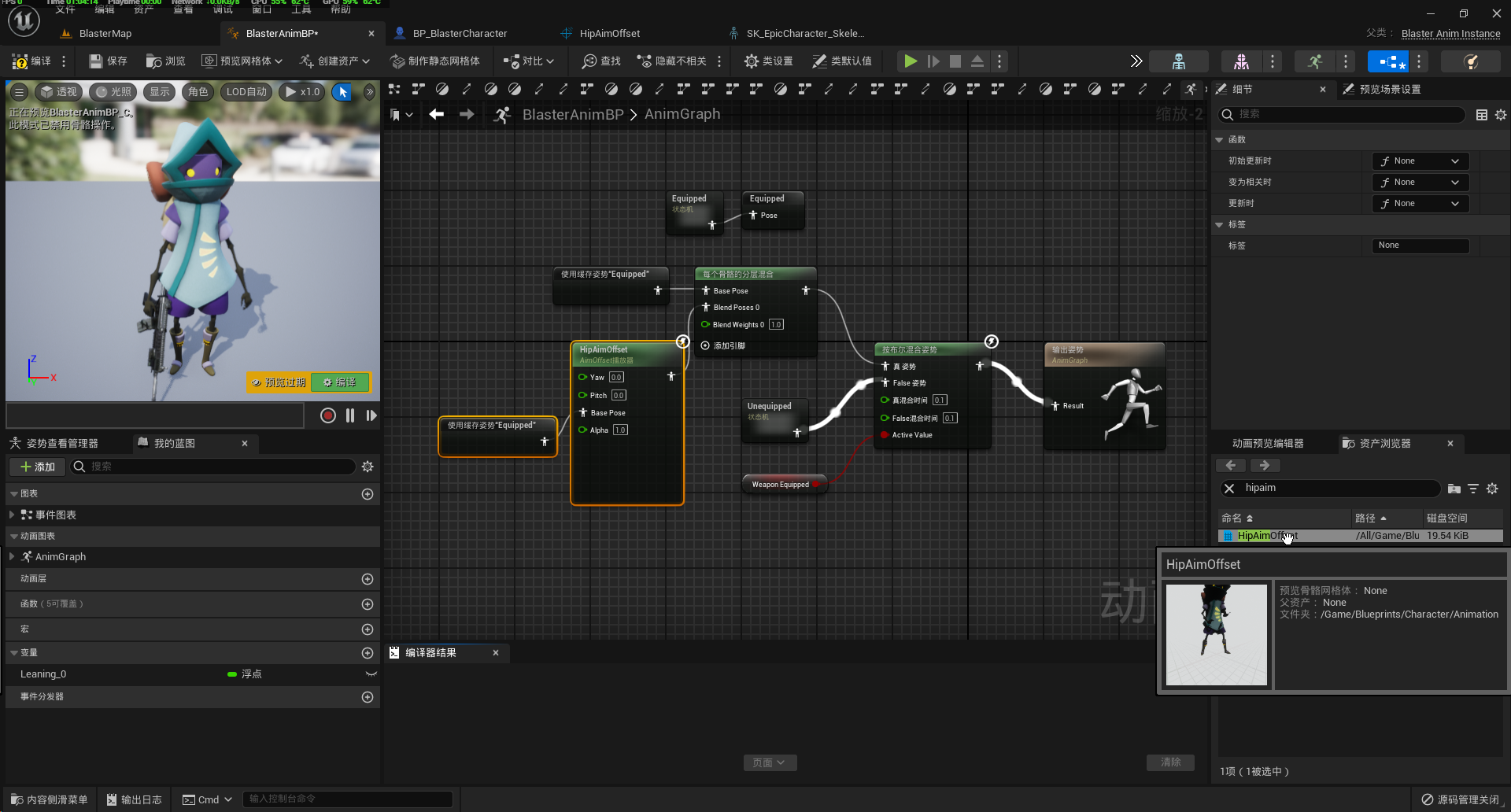
在右侧资产浏览器中将 “
HipAimOffset” 移动至面板中生成蓝图节点,并绘制下图中的蓝图。
50.2 使用 C++ 代码驱动瞄准偏移
-
蓝图节点 “
HipAimOffset” 需要与 “Yaw” 和 “Pitch” 相关的变量进行驱动。打开 Visual Studio,在 “BlasterAinmInstance.h” 中声明变量 “AO_Yaw”(记录人物角色瞄准偏移偏航角)和 “AO_Pitch”(记录瞄准偏移俯仰角);在 “BlasterCharacter.h” 中同样声明 “AO_Yaw” 和 “AO_Pitch”,并声明人物角色瞄准起始旋转 “人物角色的起始瞄准旋转” 以及瞄准偏移函数 “AimOffset()”。/*** BlasterAinmInstance.h ***/...UCLASS() class BLASTER_API UBlasterAnimInstance : public UAnimInstance {GENERATED_BODY()...private:...UPROPERTY(BlueprintReadOnly, Category = Movement, meta = (AllowPrivateAccess = "true")) // 属性说明符:仅在蓝图中可读,类别为 “Movemonet”;bool bAiming; // 是否在瞄准UPROPERTY(BlueprintReadOnly, Category = Movement, meta = (AllowPrivateAccess = "true")) // 属性说明符:仅在蓝图中可读,类别为 “Movemonet”;float YawOffset; // 人物角色水平方向偏航角UPROPERTY(BlueprintReadOnly, Category = Movement, meta = (AllowPrivateAccess = "true")) // 属性说明符:仅在蓝图中可读,类别为 “Movemonet”;float Leaning; // 人物角色身体倾斜度FRotator CharacterRotationLastFrame; // 人物角色上一帧的旋转FRotator CharacterRotation; // 人物角色当前的旋转FRotator DeltaRotation; // 旋转体插值的当前值/* P50 应用瞄准偏移(Applying Aim Offset)*/UPROPERTY(BlueprintReadOnly, Category = Movement, meta = (AllowPrivateAccess = "true")) // 属性说明符:仅在蓝图中可读,类别为 “Movemonet”;float AO_Yaw; // 瞄准偏移偏航角UPROPERTY(BlueprintReadOnly, Category = Movement, meta = (AllowPrivateAccess = "true")) // 属性说明符:仅在蓝图中可读,类别为 “Movemonet”;float AO_Pitch; // 瞄准偏移俯仰角/* P50 应用瞄准偏移(Applying Aim Offset)*/ };/*** BlasterCharacter.h ***/...UCLASS() class BLASTER_API ABlasterCharacter : public ACharacter {GENERATED_BODY()...protected:// Called when the game starts or when spawnedvirtual void BeginPlay() override;// 与轴映射相对应的回调函数void MoveForward(float Value); // 人物角色前进或后退void MoveRight(float Value); // 人物角色左移或右移void Turn(float Value); // 人物角色视角左转或右转void LookUp(float Value); // 人物角色俯视或仰视// 与动作映射相对应的回调函数void EquipButtonPressed(); // 人物角色装备武器void CrouchButtonPressed(); // 人物角色蹲伏void AimButtonPressed(); // 人物角色开始瞄准void AimButtonReleased(); // 人物角色停止瞄准/* P50 应用瞄准偏移(Applying Aim Offset)*/void AimOffset(float DeltaTime);/* P50 应用瞄准偏移(Applying Aim Offset)*/...private:...UFUNCTION()void OnRep_OverlappingWeapon(AWeapon* LastWeapon); // OverlappingWeapon 的 Repnotify 函数UPROPERTY(VisibleAnyWhere)class UCombatComponent* Combat; // 添加枪战功能组件类UFUNCTION(Server, Reliable)void ServerEquipButtonPressed(); // 人物角色装备武器的 RPC 函数/* P50 应用瞄准偏移(Applying Aim Offset)*/ float AO_Yaw; // 人物角色瞄准偏移偏航角float AO_Pitch; // 人物角色瞄准偏移俯仰角FRotator StartingAimRotation; // 人物角色的起始瞄准旋转/* P50 应用瞄准偏移(Applying Aim Offset)*/... }; -
在 “
BlasterCharacter.cpp” 中完成 “AimOffset()” 的定义,获取人物角色瞄准偏航角 “AO_Yaw” 及俯仰角 “AO_Pitch”,并且使得人物角色在静止站立且不跳跃时,人物角色的正前方朝向不跟随跟随我们的控制器(鼠标)改变;而在奔跑和跳跃时,人物角色的正前方朝向跟随我们的控制器进行改变,始终为控制器的当前朝向。接下来,不要忘记在 “Tick()” 函数中调用 “AimOffset()”。/*** BlasterCharacter.cpp ***/.../* P50 应用瞄准偏移(Applying Aim Offset)*/ #include "Kismet/KismetMathLibrary.h" /* P50 应用瞄准偏移(Applying Aim Offset)*/.../* P50 应用瞄准偏移(Applying Aim Offset)*/ // 瞄准偏移 void ABlasterCharacter::AimOffset(float DeltaTime) {if (Combat && Combat->EquippedWeapon == nullptr) return;FVector Velocity = GetVelocity(); // 获取人物角色速度向量Velocity.Z = 0.f; // 不关心 Z 轴速度,设置为 0float Speed = Velocity.Size(); // 获取人物角色速度向量的模(大小)bool bIsInAir = GetCharacterMovement()->IsFalling(); // 判断人物角色是否掉落从而判断人物角色是否在空中if (Speed == 0.f && !bIsInAir) { // 当人物角色静止站立且不跳跃时FRotator CurrentAimRotation = FRotator(0.f, GetBaseAimRotation().Yaw, 0.f); // 获取人物角色当前瞄准旋转FRotator DeltaAimRotation = UKismetMathLibrary::NormalizedDeltaRotator(CurrentAimRotation, StartingAimRotation); // 标准化获取 CurrentAimRotation 和 StartingAimRotation 的差量AO_Yaw = DeltaAimRotation.Yaw; // 获取人物角色瞄准偏航角bUseControllerRotationYaw = false; // 禁用控制器旋转偏航}if (Speed > 0.f || bIsInAir) { // 当奔跑或跳跃时StartingAimRotation = FRotator(0.f, GetBaseAimRotation().Yaw, 0.f); // 改变奔跑或跳跃状态转换为静止站立状态时的起始瞄准旋转AO_Yaw = 0.f; // 由于启用了控制器旋转偏航,人物角色朝向始终面向控制器当前朝向,因此设置 AO_Yaw 为 0 bUseControllerRotationYaw = true; // 启用控制器旋转偏航} } /* P50 应用瞄准偏移(Applying Aim Offset)*/...// Called every frame void ABlasterCharacter::Tick(float DeltaTime) {Super::Tick(DeltaTime);// // 如果有与人物角色重叠的武器,则在每个 tick 都显示拾取组件// if (OverlappingWeapon) OverlappingWeapon->ShowPickupWidget(true);/* P50 应用瞄准偏移(Applying Aim Offset)*/AimOffset(DeltaTime);/* P50 应用瞄准偏移(Applying Aim Offset)*/ }... -
在 “
BlasterCharacter.h” 定义内联函数 “GetAO_Yaw()” 和 “GetAO_Pitch()”,以便在 “BlasterAinmInstance.cpp” 的 函数 “NativeUpdateAnimation()” 中进行调用,获取 “AO_Yaw” 和 “AO_Pitch” 的值。/*** BlasterCharacter.h ***/...UCLASS() class BLASTER_API ABlasterCharacter : public ACharacter {GENERATED_BODY()...public:...bool IsWeaponEquipped(); // 判断是否装备了武器bool IsAiming(); // 判断是否在瞄准/* P50 应用瞄准偏移(Applying Aim Offset)*/FORCEINLINE float GetAO_Yaw() const { return AO_Yaw; }FORCEINLINE float GetAO_Pitch() const { return AO_Pitch; }/* P50 应用瞄准偏移(Applying Aim Offset)*/ };/*** BlasterAinmInstance.cpp ***/...// 原生(Native)类更新函数 NativeUpdateAnimation() 覆写,用于在每一帧调用以更新动画 void UBlasterAnimInstance::NativeUpdateAnimation(float DeltaTime) {...// 获取人物角色的倾斜度CharacterRotationLastFrame = CharacterRotation; // 保存人物角色上一帧的旋转CharacterRotation = BlasterCharacter->GetActorRotation(); // 获取当前人物角色的旋转const FRotator Delta = UKismetMathLibrary::NormalizedDeltaRotator(CharacterRotation, CharacterRotationLastFrame); // 标准化获取人物角色当前旋转与上一帧旋转的差量const float Target = Delta.Yaw / DeltaTime; // Delta 的 Yaw 值可能会很小,需要除以 DeltaTime(每一帧的时间)进行缩放,获取目标 Yaw 值const float Interp = FMath::FInterpTo(Leaning, Target, DeltaTime, 6.f); // FMath::FInterpTo() 实现 Lean 到 Target 插值(Interporlation),保证平滑过渡,这里最后一个参数 6.f 是插值速度Leaning = FMath::Clamp(Interp, -90.f, 90.f); // FMath::Clamp() 限制数值范围,如果 Interp 的值超过设定的最小值 -90.0 或最大值 90.0,就将 Lean 赋值为设定的最小值或最大值;否则直接将 Interp 赋值给 Lean。/* P50 应用瞄准偏移(Applying Aim Offset)*/AO_Yaw = BlasterCharacter->GetAO_Yaw(); // 从 BlasterCharacter 获取 AO_YawAO_Pitch = BlasterCharacter->GetAO_Pitch(); // 从 BlasterCharacter 获取 AO_Pitch /* P50 应用瞄准偏移(Applying Aim Offset)*/ } -
编译后,回到虚幻引擎中 “
BlasterAnimBP” 的 “AnimGraph” 蓝图面板,添加 “获取 AO Yaw”(Get AO Yaw)和 “获取 AO Yaw”(Get AO Yaw)节点,并分别与 “HipAimOffset” 节点的 “Yaw” 和 “Pitch” 引脚进行连接。
-
编译、保存后进行测试,可以观察到人物角色在静止站立且不跳跃时,人物角色的前方朝向不跟随跟随我们的控制器,其向左、向右的瞄准动画可以正确播放。在奔跑和跳跃时,人物角色的正前方朝向跟随我们的控制器进行改变,始终为控制器的当前朝向。

-
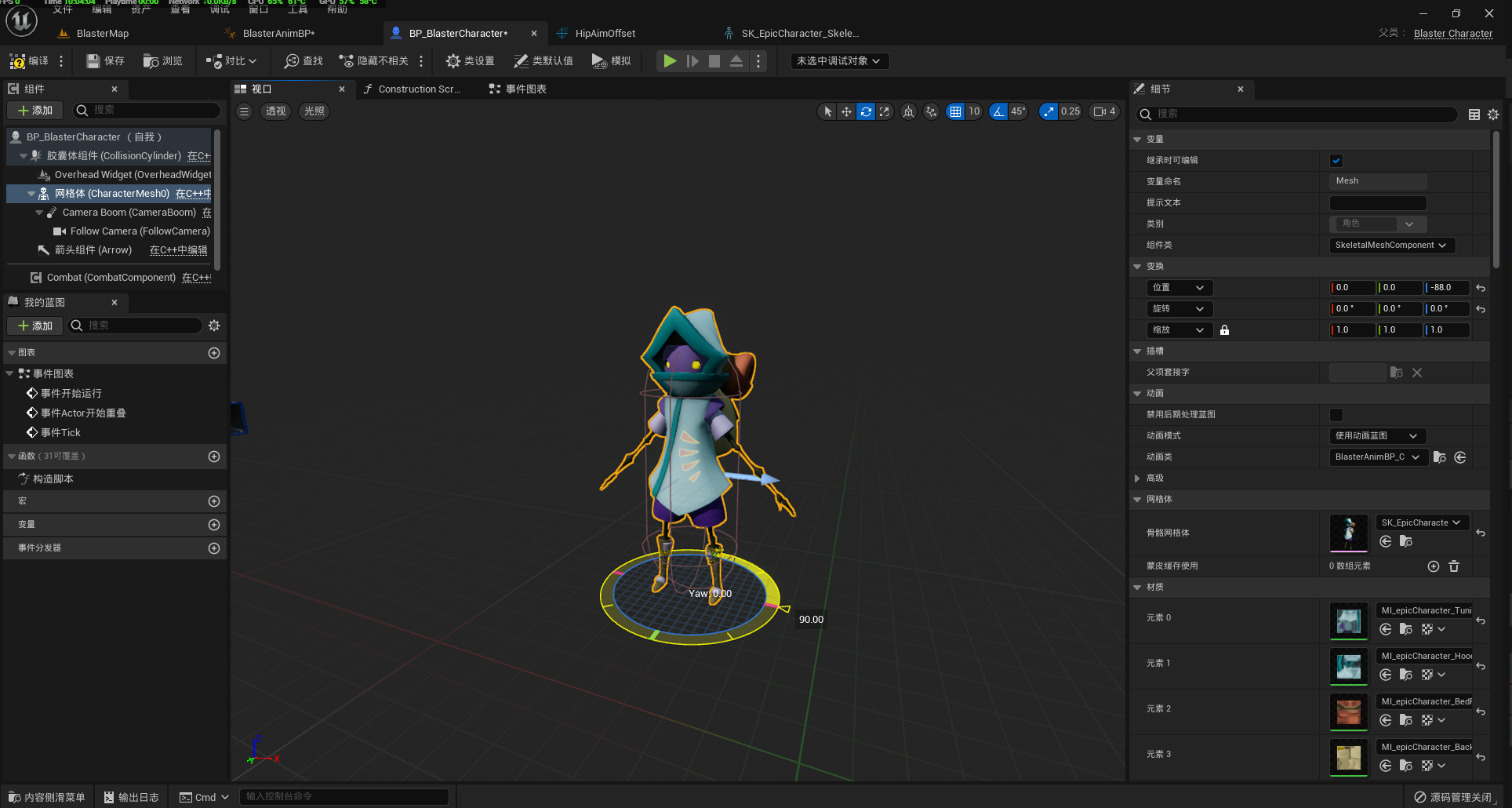
在人物角色蓝图类 “
BP_BlasterCharacter” 中将人物角色网格体旋转 90°,再次进行测试,可以观察向上、向下瞄准动画能正确播放。
-
回到虚幻引擎中 “
BlasterAnimBP” 的 “AnimGraph” 蓝图面板,在右侧资产浏览器中将 “AimAimOffset” 移动至面板中生成蓝图节点,绘制下图所示的蓝图。
-
编译、保存后进行测试,可以观察到人物角色在静止站立且不跳跃进行瞄准时,人物角色的前方朝向不跟随跟随我们的控制器,其向左、向右、向上、向下的瞄准动画可以正确播放。

-
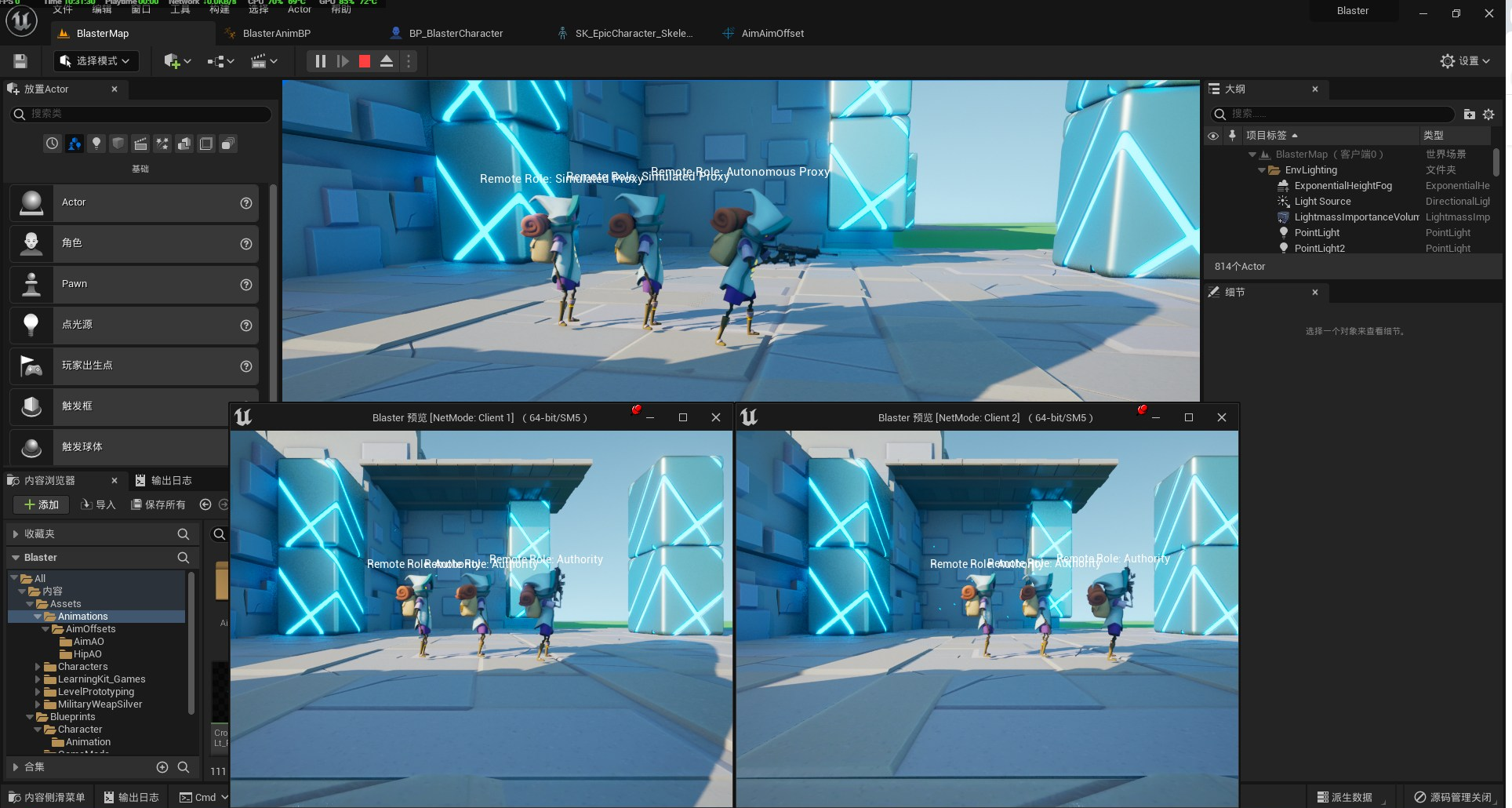
当我们控制服务器上的人物角色进行向下瞄准时,会在客户端上发现服务器的人物角色会向上瞄准,即出现服务器和客户端动画不同步的问题,我们将在下节课中探讨并解决这个问题
50.3 Summary
本节课我们成功实现了瞄准偏移(Aim Offset)系统在角色动画中的应用。首先,我们在动画蓝图中创建了缓存姿势节点,将装备武器的状态机输出保存为 “Equipped” 缓存姿势,以便在多个位置复用。接着,使用 “每个骨骼的分层混合”(Layered blend per bone)节点,基于 “spine_01” 骨骼将上半身瞄准动画与下半身移动动画进行混合,确保瞄准动作只影响上半身。
在 C++ 代码中,我们在 “BlasterCharacter” 类中添加了 “AO_Yaw” 和 “AO_Pitch” 变量来控制瞄准偏移的角度,完成了 “AimOffset()” 函数的定义以实现当人物角色静止站立时禁用控制器偏航旋转,基于起始旋转计算偏航差量;当奔跑或跳跃时,启用控制器偏航旋转,重置偏航值为 0。同时,我们还通过定义内联函数 “GetAO_Yaw()” 和 “GetAO_Pitch()” 向动画实例 “BlasterAnimInstance” 传递 “AO_Yaw” 和 “AO_Pitch” 的值。
在动画蓝图中,我们将获取到的 “AO_Yaw” 和 “AO_Pitch” 值分别连接到 “HipAimOffset” 或 “AimAimOffset” 的对应输入引脚,驱动人物角色能够在静止时身体保持面向原始方向,仅武器随鼠标移动瞄准,并正确播放各个方向(左、右、上、下)的瞄准动画。
当我们控制服务器上的人物角色进行向下瞄准时,会在客户端上发现服务器的人物角色会向上瞄准,即出现服务器和客户端动画不同步的问题,这将在后续课程中解决。
