Android 倒车影像
实现原理(核心思想:双系统/双通路)
现代智能车机的实现方案通常基于一颗强大的SoC(系统级芯片),比如高通骁龙汽车平台(SA8155P, SA8295P等)或瑞萨RCAR系列。这类芯片的设计理念是:“一个芯片,多个操作系统” 或 “混合关键性系统”
其核心原理可以概括为下图所示的流程:
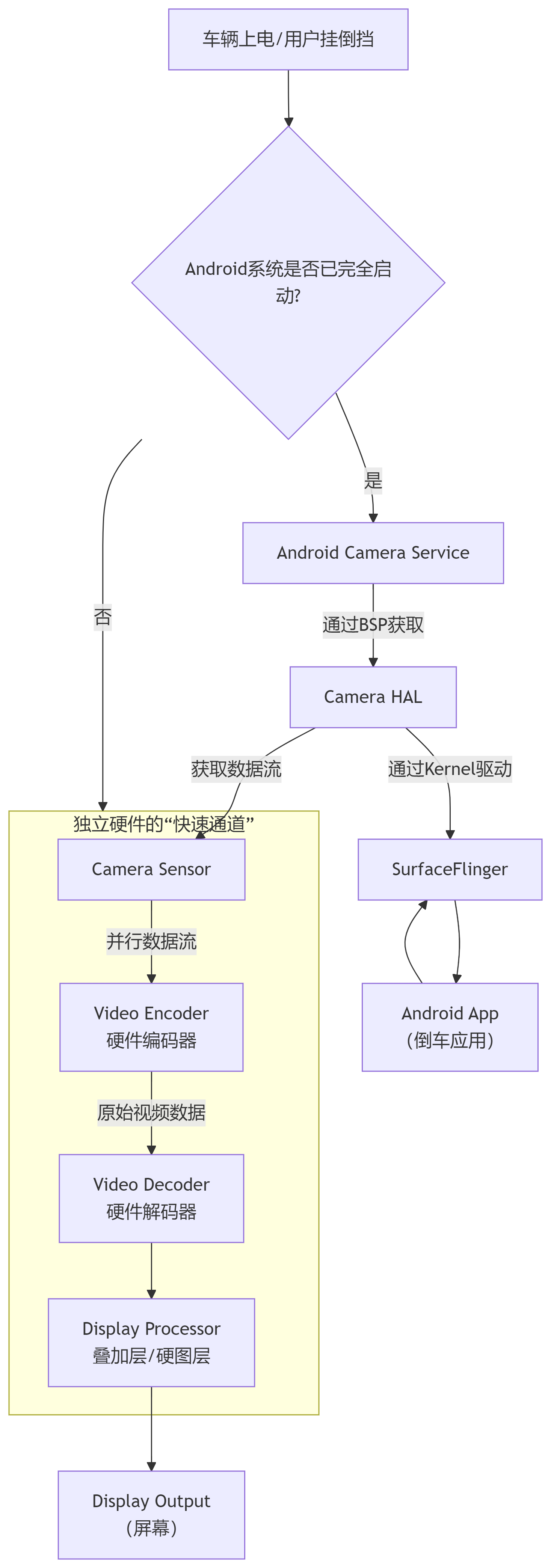
1)硬件层面:独立的视频通路(Fast Path)
这是实现“Android未启动就显示”的关键。SoC内部并非只有一个处理核心,而是包含:
- 应用处理器(AP):运行庞大的Android系统
- 图像信号处理器(ISP):专门处理来自Camera传感器的原始数据
- 视频编解码器(Codec):硬件单元,负责快速编码或解码视频流
- 显示处理器(Display Processor):负责混合多个图层并输出到屏幕
“快速通路”的工作流程如下:
- 上电/倒挡信号触发:车辆上电或用户挂入倒挡时,一个硬件电平信号(如GPIO)或最简单的单片机(MCU)会首先被触发
- Camera传感器上电:这个信号直接通知Camera传感器和ISP开始工作,采集视频数据。这个过程完全不依赖Android
- 硬件编解码:采集到的视频数据(通常是YUV格式)通过SoC内部的硬件编码器(如H.264编码器)进行编码,或者直接 bypass(旁路)编码环节
- 硬图层叠加(Overlay):显示处理器有一个硬件覆盖层(Hardware Overlay)。这个层具有最高优先级,可以绕过Android的图形合成系统(SurfaceFlinger),直接向屏幕输出画面。倒车影像和简单的警示图形(如轨迹线)就由这个硬件层负责渲染
- 直接输出:处理好的图像数据通过显示接口(如LVDS, eDP, MIPI-DSI)直接输出到车机屏幕
整个通路:Camera -> ISP -> Codec -> Display Processor -> Screen,都是在硬件层面或极简的固件(Firmware)控制下完成的,类似于一个FPGA的流水线,延迟极低(<100ms),且不依赖Android内核和系统
2)软件层面:Bootloader阶段的迷你图形系统
在Android内核启动之前,系统会经历Bootloader阶段(如U-Boot)。在这个阶段,可以运行一个轻量级的图形应用或固件
- 这个迷你程序会初始化最基础的显示、GPU和Camera硬件
- 它持续监听倒挡触发信号。一旦收到信号,立即启动上述的“硬件快速通路”,将画面显示出来
- 等到Android系统完全启动后,这个迷你程序会将显示控制权交给Android系统上的倒车应用。此时,倒车影像可能会从一个“硬图层”切换为“Android应用图层”,用户可能感知不到任何切换,或者会有一个细微的闪烁
技术实现与代码
这部分代码通常不属于公开的Android AOSP代码,而是由芯片厂商(如Qualcomm, NXP)和车机供应商(Tier1)提供的BSP(Board Support Package) 和 特定固件
1)Android未启动时(Fast Path)
- 技术:直接操作寄存器、使用芯片厂商提供的底层SDK或固件
- 代码位置:通常在U-Boot阶段或芯片内置的DSP/协处理器程序中
- 语言:主要是 C 和 汇编
- 示例(伪代码/概念代码):
// 在Bootloader或MCU程序中 void main() {// 1. 初始化硬件:GPIO(用于检测倒挡信号)、Display、Camera ISPgpio_init();display_init();camera_isp_init();while(1) {// 2. 轮询或中断检测倒挡信号if(gpio_get_value(REVERSE_GEAR_PIN) == HIGH) {// 3. 启动Camera数据流camera_start_stream();// 4. 获取一帧数据(或配置DMA直接传输)frame_buffer = camera_get_frame();// 5. 简单处理(如缩放、颜色转换),通常由ISP硬件完成// 6. 直接写入显示缓冲区的特定Overlay层display_overlay_write(frame_buffer);}} }
2)Android启动后(Slow Path)
当Android系统起来后,倒车功能会切换回标准的Android应用模式
- 技术:
○ Camera2 API:Android上访问Camera的主流API
○ SurfaceView / TextureView:用于显示实时视频流
○ Camera HAL:硬件抽象层,是Android框架与底层Camera驱动的桥梁。车机厂商会在这里做大量定制,以优化延迟和稳定性 - 代码(Java - Android App层):
public class ReverseCameraActivity extends Activity {private CameraDevice mCameraDevice;private CameraCaptureSession mSession;private SurfaceView mSurfaceView;@Overrideprotected void onCreate(Bundle savedInstanceState) {super.onCreate(savedInstanceState);setContentView(R.layout.activity_reverse);mSurfaceView = findViewById(R.id.surface_view);// 获取CameraManagerCameraManager manager = (CameraManager) getSystemService(Context.CAMERA_SERVICE);String cameraId = manager.getCameraIdList()[0]; // 通常后置摄像头ID为0// 打开摄像头manager.openCamera(cameraId, new CameraDevice.StateCallback() {@Overridepublic void onOpened(@NonNull CameraDevice camera) {mCameraDevice = camera;// 创建Capture请求,并将SurfaceView的Surface作为输出目标Surface previewSurface = mSurfaceView.getHolder().getSurface();final CaptureRequest.Builder requestBuilder = camera.createCaptureRequest(CameraDevice.TEMPLATE_PREVIEW);requestBuilder.addTarget(previewSurface);// 创建CaptureSessioncamera.createCaptureSession(Arrays.asList(previewSurface), new CameraCaptureSession.StateCallback() {@Overridepublic void onConfigured(@NonNull CameraCaptureSession session) {mSession = session;// 设置重复请求,持续显示预览画面session.setRepeatingRequest(requestBuilder.build(), null, null);}// ... 其他回调方法}, null);}// ... 其他回调方法}, null);} } - 底层支持(C++ - HAL/Kernel层):
○ V4L2(Video for Linux 2):Linux内核中处理视频设备的通用框架。Camera的底层驱动通常基于V4L2
○ DRM/KMS(Direct Rendering Manager/Kernel Mode Setting):现代Linux系统管理显示输出的框架。负责模式设置、图层合成等
总结
| 特性 | Android未启动时(Fast Path) | Android启动后(Slow Path) |
|---|---|---|
| 核心原理 | 硬件快速通路,独立于AP | Android软件栈,运行在AP上 |
| 技术实现 | Bootloader迷你程序、固件、直接操作硬件 | Android App、Camera2 API、SurfaceView |
| 代码语言 | C、汇编 | Java(App)、C++(HAL/Kernel) |
| 延迟 | 极低(<100ms),实时性强 | 较高(100-300ms),依赖系统状态 |
| 优势 | 快、稳定、安全,不依赖系统 | 功能丰富、可交互、UI美观 |
简单来说,“上电立即显示”是靠一套独立的硬件流水线实现的,而Android起来后的倒车画面则切换到了功能更丰富的软件方案。两者之间的无缝切换是车机系统供应商的核心技术之一