Matlab机器人工具箱使用2 DH建模与加载模型
第一个mujoco仿真逆解项目
我的第一个mujoco逆解仿真如上,是自己建模的4DOF机械臂,使用几何逆解,但是没有做详细的DH建模展示PPT,因此还是使用视频教程的机械臂。
教程视频来源:【MATLAB机器人工具箱10.4 机械臂仿真教学】 https://www.bilibili.com/video/BV1q44y1x7WC/?p=2&share_source=copy_web&vd_source=2c56c6a2645587b49d62e5b12b253dca
这一节主要讲在matlab如何对模型进行描述,在其他的仿真软件中,我们常常用到xml、urdf、srdf等结构描述文件进行描述,matlab则提供了一种类的描述,即通过对SerialLink的实例属性赋值完成描述。
至于如何从solidworks中导入自己的stl文件,这个我们之后再讲,不是本专栏的核心内容。
标准DH建模复习速通
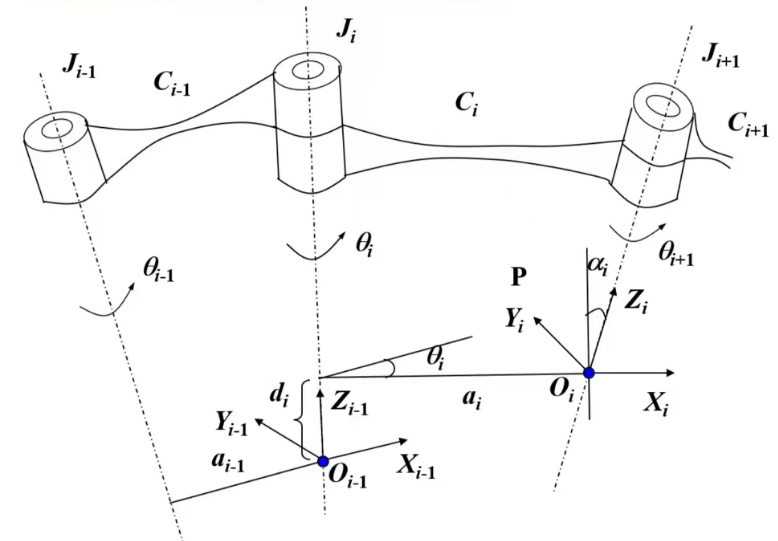
建模的方式不是去填表格,那表格填不明白的,最好的方式是如下通过坐标系间的变换来建模,这位up的方法和我之前不谋而合。
即描述下一个坐标系相对于上一个坐标系做了哪些变换?
这不仅能帮助建模,更是为计算相邻连杆的变换矩阵,以至于正逆运动学打下基础。
标准DH描述包含四个参数,分别对于连杆和连接连杆的关节,分别描述了机械结构的静态特性与动态特性。
连杆参数——
连杆长度:公垂线长度,指
到
之间公垂线。
扭转角:轴线夹角,指从
向
右手方向的夹角。
关节参数——
偏距:两公垂线在轴线的距离,指在
上,公垂线
与
的距离。
关节角:两公垂线在关节处夹角,指在
上,公垂线
与
的夹角。
当关节i是移动关节时,连杆偏距di是变量;
当关节i是转动关节时,关节角θi是变量;
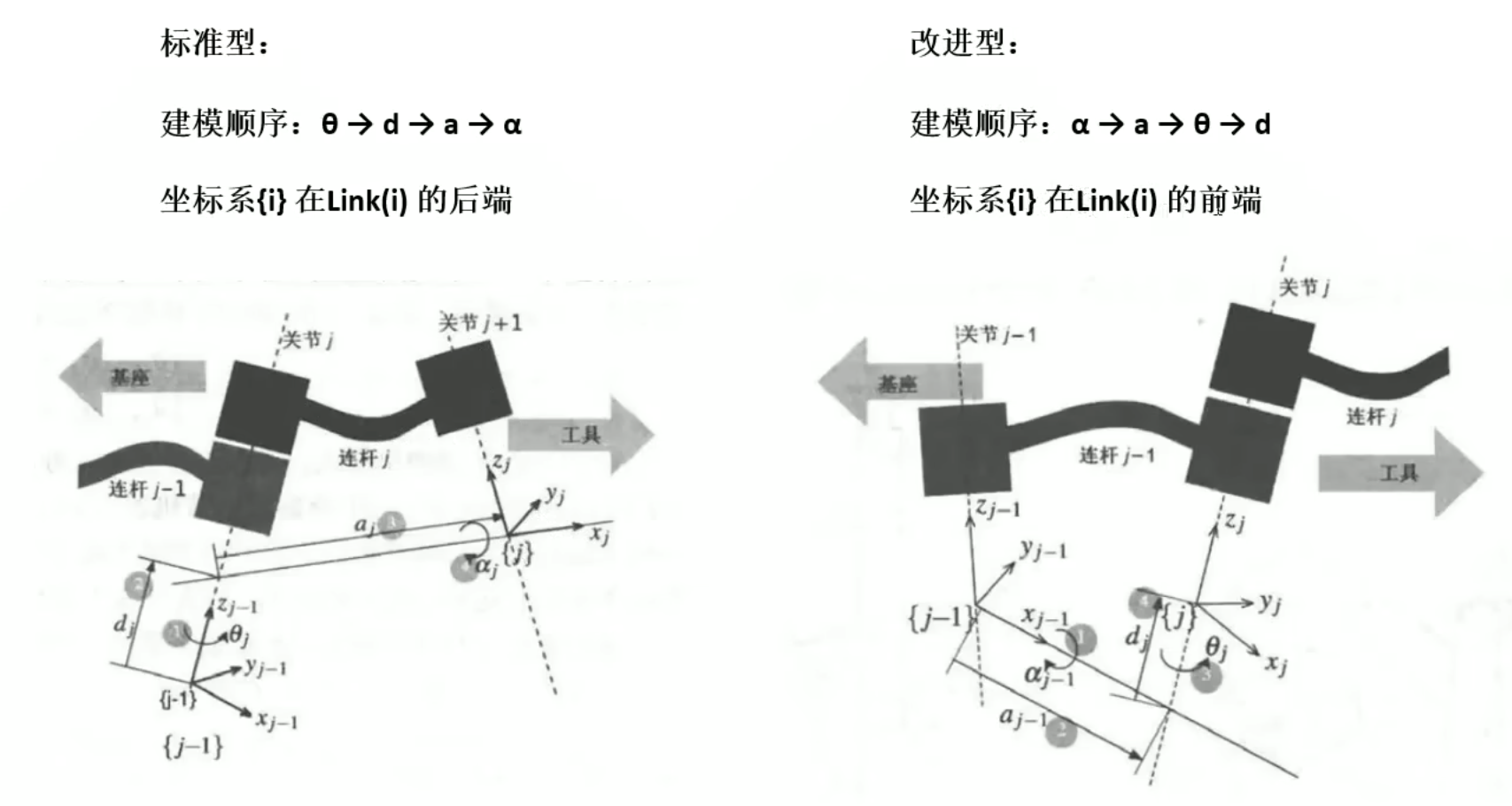
改进型最大的区别就是坐标系和连杆的相对位置不同,允许描述正交型相邻的坐标系。
标准DH建模
参数分别是:(关节类型、第一参数:值,第二参数:值,第三参数:值,建模类型)
其中,注意到offset,他代表着该关节的关节变量,比如旋转关节,那么θ就是offset,θ就不必定义;平移关节,那么d就是offset,d就不必定义;(因为他们作为动态参数)
SerialLink描述串联机器人
机器人实例可以通过类来管理。
这里用SerialLink(串联机器人)这个类定义了一个实例Five_dof,这个实例包含定义的各关节参数L、以及名称“五轴机器人”。
transl指基坐标系的平移量(就是上节课的平移变换矩阵对基坐标系作用),是类属性调整。
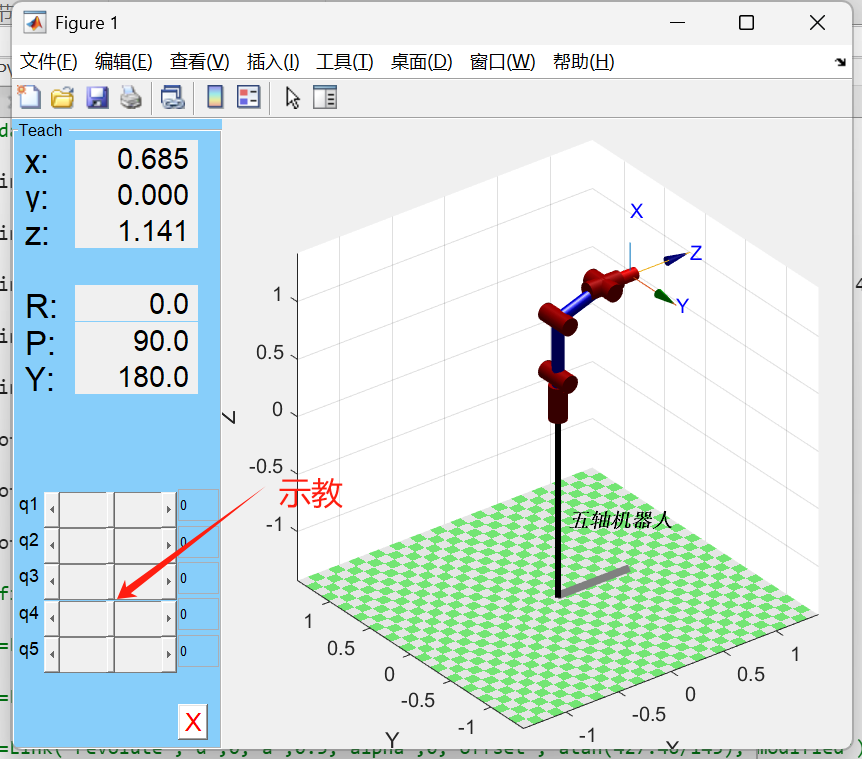
teach就是示教,是类函数调用。你可以理解为mujoco的simulate XX.xml,我们写的L定义就类似于XML文档/urdf文档。
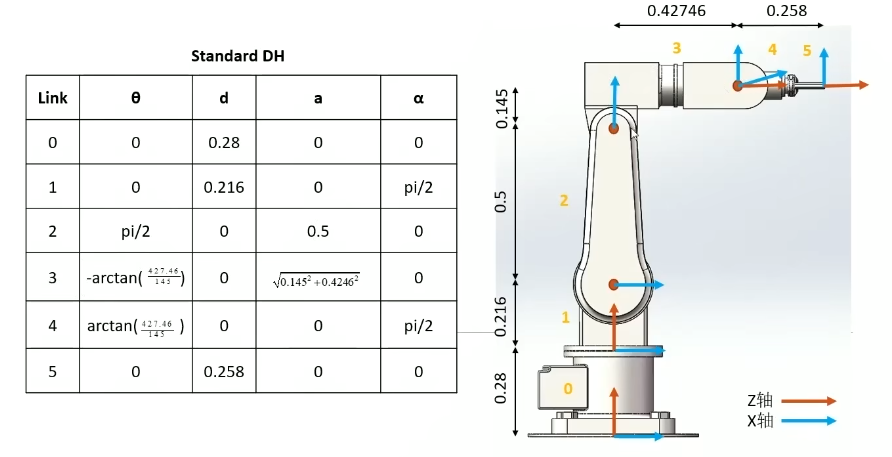
%%standard DHL(1)=Link('revolute','d',0.216,'a',0,'alpha',pi/2);L(2)=Link('revolute','d',0,'a',0.5,'alpha',0,'offset',pi/2);L(3)=Link('revolute','d',0,'a',sqrt(0.145^2+0.42746^2),'alpha',0,'offset',-atan(427.46/145));L(4)=Link('revolute','d',0,'a',0,'alpha',pi/2,'offset',atan(427.46/145));L(5)=Link('revolute','d',0.258,'a',0,'alpha',0);Five_dof=SerialLink(L,'name','五轴机器人');Five_dof.base=transl(0,0,0.28);Five_dof.teach;改进DH建模
参数分别是:(关节类型、第一参数:值,第二参数:值,第三参数:值,建模类型)
其中,注意到offset,他代表着该关节的关节变量,比如旋转关节,那么θ就是offset,θ就不必定义;平移关节,那么d就是offset,d就不必定义;
其他同上。
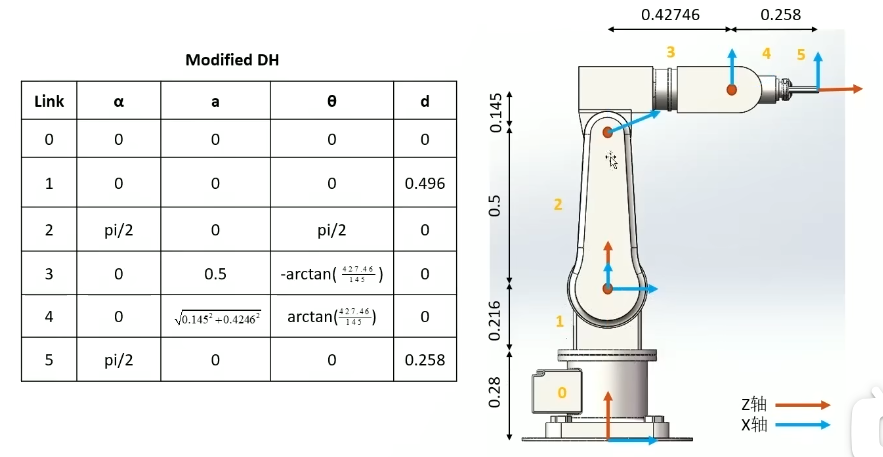
%%Modified DHL(1)=Link('revolute','d',0,'a',0,'alpha',0,'modified');L(2)=Link('revolute','d',0,'a',0,'alpha',pi/2,'offset',pi/2,'modified');L(3)=Link('revolute','d',0,'a',0.5,'alpha',0,'offset',-atan(427.46/145),'modified');L(4)=Link('revolute','d',0,'a',sqrt(0.145^2+0.42746^2),'alpha',pi/2,'offset',atan(427.46/145),'modified');L(5)=Link('revolute','d',0.258,'a',0,'alpha',pi/2,'modified');Five_dof_mod=SerialLink(L,'name','五轴机器人');Five_dof_mod.base=transl(0,0,0.496);Five_dof_mod.teach;两份代码展示的结果都应一样: