笔记:卷积神经网络(CNN)
目录
1.卷积神经网络流程
2.模拟一个简单的卷积流程(输入到扫描)
3.提取图片特征
3.1. 把 RGB → 灰度图(数值矩阵)
3.2. 灰度图→张量→标准化
4.填充
4.1. 填充是什么/为什么
4.2. 常见填充方式
5.扫描
5.1. 卷积核的生成
5.2. 扫描时的运算
5.3. 卷积核的优化
5.4. 卷积核为什么不用2*2的,卷积核的大小会有什么影响?
6.池化
6.1. 池化是做什么
6.2. 池化历程
6.3. 池化边界不能够整除怎么办?
7.扁平化
7.1. 扁平是什么
8.全连接层运算
8.1. 局部感受野
8.2. 神经元的连接与参数
8.2.1. 局部连接但不共享参数(早期神经网络的思路)
8.2.2. 卷积层(局部连接 + 参数共享)
8.3. 偏置(bias)
8.4. 超参数和可学习参数
8.4.1. 人为设定(超参数,训练前就敲定)
8.4.2. 训练中学习(可学习参数)
8.4.3. 两类参数的关系
8.5. 深究池化的影响
8.6. 扁平化的作用
9. 小结
笔者作为仅有一小部分基础的情况下,前1-7阐述了基本定义,8通过串联和补缺成功对卷积神经网络有了相对的了解和理解。
1.卷积神经网络流程

输入-->提取图片特征-->填充(可省略)-->扫描-->池化-->扁平化-->神经网络运算-->输出
2.模拟一个简单的卷积流程(输入到扫描)
数值参量:
灰度图/图像 长 H 宽 W
卷积核边长 k
填充圈数 p
扫描步长 s
import numpy as npdef conv_out_hw(H, W, k, s=1, p=0, d=1):k_eff = d*(k-1)+1Ho = (H + 2*p - k_eff)//s + 1Wo = (W + 2*p - k_eff)//s + 1return Ho, Wodef scan_count_matrix(n=5, m=3, line=1, foot=1):H = W = np = lines = footk = m# 填充后的画布Hpad, Wpad = H+2*p, W+2*pcounts = np.zeros((Hpad, Wpad), dtype=int)# 只统计“核完整落入画布”的位置(VALID 滑动)for i in range(0, Hpad - k + 1, s):for j in range(0, Wpad - k + 1, s):counts[i:i+k, j:j+k] += 1return counts# 例子:5x5 输入, 3x3 卷积, p=1, s=1
H, W = 5, 5
k, p, s = 3, 1, 1
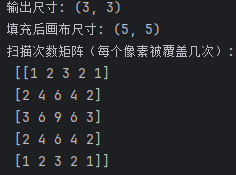
print("输出尺寸:", conv_out_hw(H, W, k, s, p)) # 期望 (5, 5)C = scan_count_matrix(n=H, m=k, line=p, foot=s)
print("填充后画布尺寸:", C.shape) # 7x7
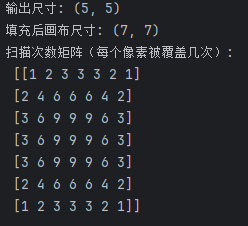
print("扫描次数矩阵(每个像素被覆盖几次):\n", C)
此程序输出了不同图像单元在填充后扫描的次数,如下图,显而易见,如果不经过填充,即p=0,边缘特征被扫描提取的次数即为有限,例如第一行,填充p=1时,分别为 4,6,6,6,4. p=0时,分别为 1,2,3,2,1
已经了解了大概流程,现在详述每个步骤。
3.提取图片特征
3.1. 把 RGB → 灰度图(数值矩阵)
灰度并不是简单求平均,更常用感知加权(人眼对 G 更敏感):
BT.601(常见)
Y=0.299 R+0.587 G+0.114 B
BT.709(高清/现代)
Y=0.2126 R+0.7152 G+0.0722 B
这里的 R/G/B 通常指线性化后或已在 0~1 范围的值。
3.2. 灰度图→张量→标准化
常见的几种方式:
1. PIL + torchvision
2. OpenCV→PyTorch
3. 纯 NumPy(已经有灰度张量时手写权重)
4.填充
4.1. 填充是什么/为什么
在输入的边缘补像素,常见目的:
1. 保尺寸:卷积后高宽不变(便于残差/跳连)。
2. 边缘利用:让边界像素参与同等次数的卷积。
3. 控制输出尺寸:配合步长/空洞精确得到想要的大小。
4.2. 常见填充方式
1. zeros/constant:补 0(最常用),也可补常数 c。
2. reflect:镜像反射;
3. replicate:复制边缘。
4. circular:环绕(周期)。
5.扫描
5.1. 卷积核的生成
在深度学习里,卷积核(权重)不是手工写常数,而是可学习参数。
初始化(常见):
Kaiming/He:适合 ReLU 家族
Xavier/Glorot:适合 tanh/线性
学习:前向算输出 → 计算损失 → 反向传播出梯度 → 用优化器更新
5.2. 扫描时的运算
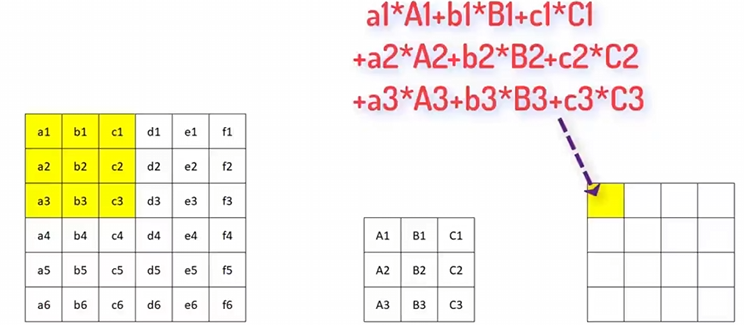
下图正是在演示一次卷积的“扫描运算”
左边黄框是输入特征图的一个 3×33\times33×3 局部窗口(元素 a1,b1,c1,…)。
中间是 3×3 卷积核(元素 A1,B1,C1,…)。
把两者对应元素相乘再求和(点积),得到右上角输出格子的数值:
5.3. 卷积核的优化
卷积核是一个可以优化学习的参量,可以理解为感知机中的weight权重,通过神经网络的前馈和计算损失,在经反向传播优化,虽然中间隔着池化和扁平化两个步骤,但是卷积核的梯度并不会被“池化”和“扁平化”隔断,反向传播会把梯度一层层按链式法则传回去;池化和扁平化只是中间的可微(或分段可微)算子,各自都有清晰的反传规则,梯度会穿过它们回到卷积层,从而更新卷积核。
使用 SGD、Adam 等优化器更新卷积核参数:
随着训练迭代,卷积核逐渐从随机数“长成”能够识别边缘、纹理、形状、语义的特征提取器。
5.4. 卷积核为什么不用2*2的,卷积核的大小会有什么影响?
答:首先,偶数核没有几何中心,保持尺寸(SAME)时只能“上0下1/左0右1”地填充,易产生半像素位移,残差/跳连更难对齐,累积后明显。2×2 不是不能用:最常见在 2×2 池化、或某些上采样。其次,卷积核以小核堆叠(3×3 为主)配合 BN/残差,训练更稳定。大核更像低频滤波,能更平滑/更全局,小核堆叠能逐步扩大 RF,同时保留细节与非线性表达。
6.池化
6.1. 池化是做什么
把特征图做下采样:抑制噪声、增强局部平移鲁棒性、降低计算量。相当于提取图中的主要信息来最大限度保留内容并提高效率。常见方法:
MaxPool:取窗口内最大值(保边缘/纹理更强)。
AvgPool:取窗口平均(更平滑)。
6.2. 池化历程
池化是一个提炼关键信息的过程,通过将池化单位中信息的聚合来减少计算。
假设一个6*6的灰度图经过3*3的卷积核扫描生成了如下4*4的矩阵。
| 1 | 1 | 1 | 2 |
| 2 | 3 | 1 | 1 |
| 3 | 4 | 1 | 1 |
| 1 | 2 | 1 | 1 |
我们采用2*2池化,并采用MaxPool方法形成一个2*2的矩阵如下:
| 3 | 2 |
| 4 | 1 |
6.3. 池化边界不能够整除怎么办?
上述4*4的矩阵恰好能被2*2的池化整除,但是如果不能整除,会采用两种常用方法:
1. VALID(默认):不填充,尾部不满一窗的行/列丢掉(公式里的 floor)。
2.SAME / ceil 逻辑:输出按 ⌈H/sh⌉\lceil H/s_h\rceil⌈H/sh⌉,末尾不足一窗也输出(等价于“隐式填充”)。
PyTorch:ceil_mode=True;AvgPool 若不想让填充值稀释,设 count_include_pad=False。
或者先 pad 到能被步长整除再用 VALID 聚合(更可控,比如用 reflect/replicate)。
7.扁平化
7.1. 扁平是什么
定义:把卷积产生的多通道特征图(通常形状 [N, C, H, W])在每个样本维度内拉直为一维向量([N, C*H*W]),以便接到**全连接层(Linear/FC)**等“向量→向量”的模块。
本质:纯粹的重排/reshape操作,不引入参数;梯度在反向传播时原样传回相应位置(不会被截断)。
8.全连接层运算
8.1. 局部感受野
假设输入一个300*300的图像,下一层有10^4个神经元,如果采用全连接方式,那么一共有9*10^8个权重参数,而参数越多训练越难,因此引入局部感受野这一概念,让每一个神经元只链接图片中的其中一小部分,比如大小为4*4的范围,这个时候就只有1.6*10^5个权重参数了。
感受野(Receptive Field) 指的是:某个隐藏层神经元在输入层能看到的区域。
有效感受野(有区别于局部)的简单推到参见:笔记:深层卷积神经网络(CNN)中的有效感受野简单推导-CSDN博客
那每个神经元的局部感受野是怎么选择的呢?是随机还是有规则的?
首先我们要明确,在卷积层里,感受野是由卷积核大小决定的。卷积神经元不是随机挑区域,而是 有规则地滑动窗口。这是不是恰好就是第五部分扫描的内容!
那么第一个神经元看输入左上角的 4×4 像素,第二个神经元看右移 1 像素后的 4×4 区域,以此类推。最终这些神经元覆盖了整个图像,保证所有位置都被“扫描”到。
那如果扫描的次数远远小于神经元的个数,剩下的神经元获取谁的参数?
因此我们引入8.2. 详述神经元的参数分配。
8.2. 神经元的连接与参数
神经元的连接和参数设计两种情况:
8.2.1. 局部连接但不共享参数(早期神经网络的思路)
如果我们只在图像上“扫描”有限次,比如只放 5000 个窗口,但隐藏层设计了 10000 个神经元,那就会出现你说的情况:神经元数量 > 实际扫描位置数。
这时“多余”的神经元要么:
1. 没有输入(就闲置,相当于浪费)
2. 人工指定去看某些区域(比如多个神经元看同一个区域,但参数独立)。
所以在这种模式下,神经元数目和感受野数量需要人工设计,否则会出现资源浪费。
8.2.2. 卷积层(局部连接 + 参数共享)
CNN 里更常见的做法是:共享一组卷积核参数。
举例:一个 4×4 卷积核,就是 16 个参数(再加一个偏置)。这组参数会在整幅图像上“滑动”,每个滑动位置对应一个神经元的输出。如果滑动位置数量不够填满隐藏层的神经元个数 → 可以再增加卷积核的数量(即通道数,filters)。
比如你想要 10000 个神经元:假设滑动后得到 1000 个位置,那就需要 10 个不同的卷积核(1000×10 = 10000 个输出神经元)。
这样每个神经元都对应到某个位置 + 某个卷积核,不会出现“多余”神经元无事可做。
因此,有几个卷积核就扫描几次,就生成几个特征图。
那这些新增的卷积核是如何生成的,有参考内容还是单纯的随机?
卷积核里的权重(比如一个 3×3 卷积核就有 9 个参数 + 1 个偏置),在训练前并不是手工设计好的,而是 随机初始化的。没有预设“某个卷积核就负责边缘、某个卷积核就负责角点”,这些特征都是 训练过程中自动学到的。
常见的初始化策略,如5.1.中所讲这些初始化方法确保训练一开始卷积核不是“全 0”或“全一样”,避免网络学不动。
因为整个神经网络具有前馈传播,计算损失,反向传播,优化器优化组成的,只要卷积核初始化的不是特别的不方便学习,最后经过自主优化都能做到较大的识别概率。
这里要注意的是,卷积核和神经元是一对多的关系,多个神经元共同负责优化他们对应的那个卷积核。
8.3. 偏置(bias)
在8.2.2.中我们提到了,一个3*3的卷积核,是9个参数加一个偏置,那这个偏置的作用是什么?
笔记:人工神经网络-CSDN博客 笔者在这篇文章给出过,卷积核的计算公式,原理同神经元的计算公式。
当卷积核在图像不同位置滑动时,权重 W和偏置 b 都是共享的;也就是说,这个卷积核在图像上所有位置的计算公式都一样,只是输入区域X不同;每个输出神经元的值都会加上 同一个偏置 b。
同卷积核的参数,偏置也是卷积核一步一步学出来的。
8.4. 超参数和可学习参数
在8.2.中我们谈到了为什么会出现多个卷积核,原因是不想空闲出一些神经元,提高利用率。但事实上,卷积核的大小和数量都是人为规定的,那什么是人为定下的参数,什么是机器自己优化的参数呢?我们引入超参数和可学习参数:
8.4.1. 人为设定(超参数,训练前就敲定)
-
卷积核大小 (kernel size)
-
例如 3×3、5×5、7×7
-
小核能提细节,大核感受野更大
-
-
卷积核个数 (number of filters)
-
决定输出特征图的“通道数”
-
多 → 特征更丰富,但参数多、计算量大
-
-
步幅 (stride)
-
卷积核每次移动的距离
-
stride=1 → 保留细节;stride=2 → 特征图减半,更粗略
-
-
填充 (padding)
-
决定是否在输入边缘补零
-
padding=0 → 图像越卷越小
-
padding=“same” → 保持输入输出大小一致
-
-
网络层数、结构
-
几层卷积、是否加池化、全连接层大小
-
-
学习率、batch size、优化器类型
-
属于训练配置上的超参数
-
8.4.2. 训练中学习(可学习参数)
这些由反向传播自动优化,不需要人工干预:
-
卷积核的权重 W(每个 filter 的参数矩阵)
-
卷积核的偏置 b
-
全连接层的权重和偏置
-
(如果有 BN 层)BN 的缩放系数 γ、偏移系数 β
8.4.3. 两类参数的关系
超参数(人为敲定):定义了网络的“大框架”和计算规则。
可学习参数(模型学到):在这个框架下自动优化,用来拟合数据分布。
8.5. 深究池化的影响
模块6.已经说明了池化的原理和步骤,但是我们理解的还不够细节,
如果使用池化,会不会影响神经元的激活数量?
2个3*3卷积核,扫描后的出的特征图为4*4如果不采用池化,那么会激活2*16个神经元参与优化更新,但是如果采用2*2池化,只会使用到2*4个神经元。
是否意味着“参与优化的神经元变少了”?
是的,从输出层角度看:
没有池化时,卷积层的输出神经元多,每个位置都会产生误差并反传。 有池化时,输出被压缩了,误差信号的数量也减少了。
但不是说卷积核的参数更新“信息丢光了”:
池化本质是“汇总”局部信息(取最大值 / 平均值)。反向传播时,梯度会沿着池化的路径传回去:
最大池化:只有最大值对应的位置得到梯度;
平均池化:梯度会均匀分给池化窗口里的所有元素。
所以虽然神经元数量少了,但梯度依然会通过池化传播回卷积层,更新卷积核参数。
因此,我们总结池化的作用:
1. 减少特征图尺寸 → 神经元数量减少,计算量和参数量下降。
2. 增强平移不变性 → 池化使得小的平移/噪声不会影响特征。
3. 避免过拟合 → 适度池化相当于信息压缩,起正则化效果。
8.6. 扁平化的作用
经过了上述内容的思考,扁平化的作用就呼之欲出了。
在 CNN 里,卷积层 + 池化层输出的是一个三维张量,扁平化的用处就把这三维数据拉直,变成一个一维向量。
而刚才我们说过,每个神经元都有其对应的局部感受野,这些局部感受野在扫描阶段构成了特征图的一个点。如果没有池化阶段,那么神经元得到的数据其实就是感受野和卷积核的计算结果。如果有池化,那么神经元就是接受的池化(数据精简)后的一个计算结果,因此神经元的需求量相对于没有池化过程需要的数量要少。
因此我们总结扁平化的作用:扁平化正好是把卷积层/池化层得到的局部感受野输出,按顺序展开成向量。
9. 总结
在前八个模块,我们通过阐述定义,给出原理,提出疑问,补全盲点的方式对整个卷积神经网络有了一个更细致的了解,我们的脑子里现在应该不只是第一模块那种简单的流程了,而是具体哪个步骤会发生什么,对后续的影响是什么。
首先,我们输入一张RGB图片,通过计算转化为灰度图矩阵,为了让信息元素更多参与扫描,会先决定是否对灰度图进行一定圈数的填充,然后选择卷积核尺寸和通道数(卷积核数量)并进行初始化(基本激活函数),选择好扫描的步幅大小并进行扫描,扫描后得到了和卷积核数量一样的特征图。
当存在池化阶段时,我们会使用特定的池化方式如(最大池化,平均池化),精简特征通过扁平化成向量后输送给全连接层(神经网络),神经网络通过计算损失率和反向传播对卷积核进行更新,最后在训练中不断优化和更新,逐渐拥有了能够精确区分图像的功能。