论文介绍“DUSt3R”:让 3D 视觉从“繁琐”走向“直观”
DUSt3R:让 3D 视觉从“繁琐”走向“直观”

想象一下,你有一组用手机随意拍摄的照片,没有校准,也没有任何关于相机位置的记录。如果想用它们来重建一个 3D 模型,传统的计算机视觉方法会让你头疼不已。你需要先校准每张照片的相机参数,然后进行复杂的特征点匹配,再通过三角测量和捆集调整(Bundle Adjustment)等一系列繁琐的几何计算,才能最终得到一个勉强可用的 3D 模型。
而 DUSt3R 的出现,就像是为这个复杂流程按下了“快进键”。这篇名为《DUSt3R: Geometric 3D Vision Made Easy》的论文提出了一种颠覆性的新方法:它将整个 3D 重建过程,转化为一个直接的深度学习回归任务。 你只需要把照片丢给它,它就能直接给你一个完整的、彩色的 3D 点云,并且还能告诉你相机是怎么移动的。
核心思想:从“反推”到“直达”
DUSt3R 的核心思想在于点图(Pointmap)。你可以将点图看作是 RGB 图像的一种特殊“孪生兄弟”。对于 RGB 图像上的每一个像素,点图都存储着它在三维空间中的对应坐标 (X, Y, Z)。
传统的 3D 重建是一个复杂的“反向工程”。它依赖于已知的相机参数,通过几何投影关系来从 2D 像素反推 3D 坐标。而 DUSt3R 则反其道而行之,它用一个强大的 Transformer 模型,直接从海量的训练数据中“学习”这种 2D 到 3D 的映射关系。
正如论文摘要所述:
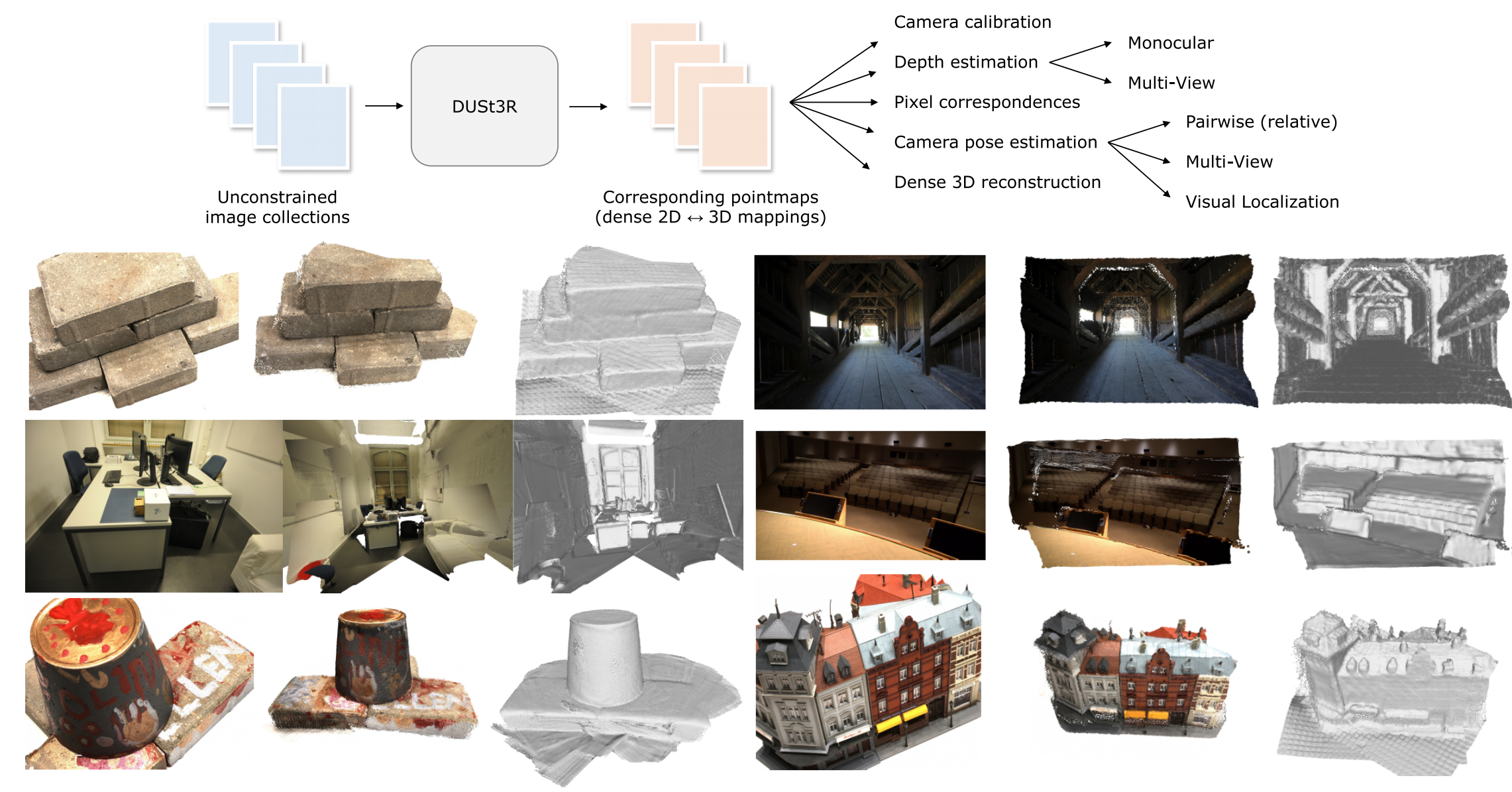
“Our method DUSt3R outputs a set of corresponding pointmaps (dense 2D 3D mappings), from which we can straightforwardly recover a variety of geometric quantities normally difficult to estimate all at once, such as the camera parameters, pixel correspondences, depthmaps, and fully-consistent 3D reconstruction.”’
(“我们的方法DUSt3R输出一组对应的点图(密集的2D到3D映射),从中我们可以直接恢复各种几何量,例如相机参数、像素对应关系、深度图和完全一致的3D重建,而这些通常很难一次性全部估计出来。”)
这个过程就像是:
- 传统的厨师:拿到食谱(相机参数),根据一步步的指示(几何计算)来烹饪。
- DUSt3R:就像一个经验丰富、天赋异禀的大厨,它通过尝遍了各种美食(训练数据),已经完全掌握了烹饪的精髓,根本不需要看食谱,就能直接做出色香味俱全的菜肴(3D 点图)。
技术实现:从点图到点云的旅程
那么,DUSt3R 是如何将多张照片整合为一个完整 3D 模型的呢?它采用了“先局部,后全局”的策略:
- 分帧预测:模型会为输入的每一张 RGB 图像都独立地预测出一张 3D 点图。这些点图就像是不同视角下,场景的 3D“快照”。
- 全局对齐:这是 DUSt3R 最巧妙的一步。它不再依赖于 2D 图像的重投影误差,而是直接在 3D 空间中进行优化。通过一个创新的优化过程,它将这些独立的 3D 点图对齐到同一个公共坐标系下。这就像是把多个 3D“拼图”块拼接在一起,最终得到一个统一、完整的 3D 点云。
论文中也明确提到了这一点:
“We propose an optimization procedure for globally aligning the pointmaps in multi-view 3D reconstruction. Unlike traditional Bundle Adjustment, this process does not minimize 2D reprojection errors, but instead directly minimizes 3D projection errors.”
(“我们提出了一个优化程序,用于在多视角3D重建中全局对齐点图。与传统的捆集调整(Bundle Adjustment)不同,该过程不是最小化2D重投影误差,而是直接最小化3D投影误差。”)
在这个过程中,DUSt3R 还会将原始 RGB 图像的颜色信息映射到 3D 点上,因此最终输出的点云是彩色的,这对于视觉化和下游应用至关重要。
颠覆性的优势与应用场景
DUSt3R 的创新不仅在于技术本身,更在于它带来的巨大实用价值。
1. 恢复相机参数
由于模型直接预测了 2D 像素与 3D 点的对应关系,因此所有传统的几何量,包括相机内外参(intrinsic and extrinsic camera parameters)和像素对应关系(pixel correspondences),都可以从最终生成的点图中轻松反向推导出来。这意味着 DUSt3R 可以像一个“万能标定工具”一样,自动从普通照片中恢复出精确的相机参数,而无需任何昂贵的校准设备。
2. 具体业务应用
基于这种强大的能力,DUSt3R 在多个领域都有广阔的应用前景:
- 虚拟现实(VR)与增强现实(AR):它可以快速从普通照片中重建出 3D 场景,为 VR/AR 应用提供逼真的数字内容,例如创建虚拟旅游或 AR 游戏。
- 机器人与无人机导航:通过实时处理图像,DUSt3R 可以为机器人或无人机提供其所在环境的 3D 地图,帮助它们进行自主导航和避障。
- 文化遗产数字化:DUSt3R 能够从历史照片或文物照片中,自动创建高精度的 3D 模型,用于永久保存、研究和虚拟展示。
- 室内设计与房地产:它可以快速重建房间的 3D 模型,帮助设计师进行虚拟布局,或者为客户提供沉浸式的房产参观体验。
论文也自信地给出了结论:
“DUSt3R achieves new state-of-the-art results on monocular and multi-view depth benchmarks as well as multi-view camera pose estimation.”
(“DUSt3R在单目和多视角深度基准测试以及多视角相机姿态估计上取得了新的最先进(SoTA)成果。”)
总而言之,DUSt3R 就像是 3D 视觉领域的一场技术革命。它用一种优雅而强大的方式,重新定义了从 2D 到 3D 的路径,为我们提供了一个更简单、更高效、更强大的解决方案。