【车载开发系列】CAN与CANFD上篇
【车载开发系列】CAN与CANFD上篇
【车载开发系列】CAN与CANFD
- 【车载开发系列】CAN与CANFD上篇
-
- 一. 什么是CAN总线
- 二. 什么是CANFD总线
- 三. CAN FD产生的背景
- 四. CAN与CANFD的比较
-
- 1)传输速率
- 2)数据域长度
- 3)数据帧格式
- 五. CAN与CANFD的优劣势
-
- 1)经典CAN优势
- 2)经典CAN劣势
- 3)CANFD优势
- 六. 如何通信配置总线
- 七. 总结
一. 什么是CAN总线
CAN总线就是控制器局域网总线,是一种用于实时应用的串行通讯协议总线(CAN,Controller Area Network)。它使用双绞线来传输数据,是在汽车电子中应用最广泛的总线之一。
CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。CAN协议的健壮性使其用途延伸至自动化以及工业领域。
CAN协议的特点包括了完整性的串行数据通讯、提供实时支持、其中传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。
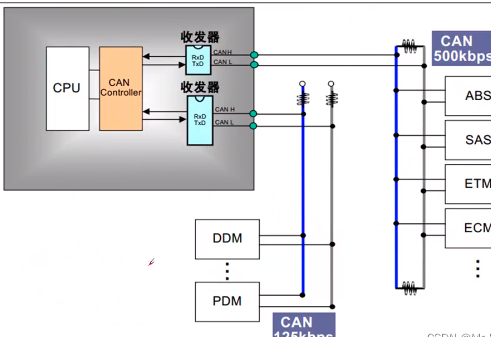
CAN协议经过ISO标准化后有两个标准ISO11898标准和IS011519-2标准。其中ISO11898是针对通信速率为125Kbps~1Mbps的高速通信标准(闭环),而IS011519-2是针对通信速率为125Kbps以下的低速通信标准(开环)。
二. 什么是CANFD总线
CANFD总线就是可变速的CAN总线(CAN with Flexible Data rate)。可以简单理解为它就是经典CAN总线的一个升级版。它只是升级了协议,在物理层它是没有改变的。
三. CAN FD产生的背景
主要是汽车功能越来越多,越来越复杂,传统的CAN总线(CAN2.0)的负载率越来越高,甚至负载率高达95%,而且传统CAN总线还存在以下的一些局限性:传输率最大不超过1Mbit/s,传统CAN数据帧超过50%的额外开销。
汽车不可能直接放弃目前的传统CAN总线技术重头来过。 那么为了解决CAN总线负载率问题,而又能兼容CAN总线,并且研发成本不能太高,因此在2015年最新的修订版ISO 11898-1(classic CAN