JC系列串口通信说明
目录
- 一、通信参数
- 二、帧格式
- 2.1、0x03 读数据
- 2.2、0x06写单个寄存器
- 2.3、0x10写多个寄存器
- 2.4、PVT指令
- 三、寄存器定义
- 四、指令说明
- 4.1 、 读取 电压
- 4.2 、 读取母线电流
- 4.3、读取实时速度
- 4.4、读取实时位置
- 4.5、读取驱动器温度
- 4.6、读取电机温度
- 4.7、读取错误信息
- 4.8、设置扭矩
- 4.9、设置速度
- 4.10、设置绝对位置
- 4.11、设置相对位置
- 4.12、切换控制模式
- 4.13、空闲状态
- 4.14、进入闭环
- 4.15、重启
- 4.16、PVT指令
- 4.17、PV指令
- 五、CRC16代码

一、通信参数
- 串口波特率默认 115200,8 个数据位,1 个停止位,无校验;
- 串口波特率可设置:9600、38400、57600、115200(默认)、230400、460800、921600bps。
二、帧格式
- 驱动器采用 Modbus-RTU 的帧格式,支持 0x03(读寄存器数据)、0x06(写单个寄存器数据)、0x10(写多个寄存器数据)功能码。
- 新增了专用的 PVT 指令,20250828。
2.1、0x03 读数据
- 发送端:

第1个字节:ADR为驱动器地址(1-127),
第2个字节:0x03为功能码,表示读寄存器数据,
第 3、4 字节:要读的寄存器开始地址,
第 5、6 字节:要读的寄存器数量,
第 7、8 字节:从字节 1 到 6 的 CRC16 校验和。 - 驱动器回复:

第 1个字节:ADR为驱动器地址(1-127),
第 2个字节:返回读功能码0x03,
第 3 字节: 从 4 到 M(包括 4 及 M)的字节总数,
第 4 到 M 字节: 寄存器数据,高字节在前,
第 M+1、M+2 字节: 从字节 1 到 M 的 CRC16 校验和。 - 当驱动器接收数据错误时,回复:

异常码:0x01表示功能码错误,0x02表示寄存器地址错误。
2.2、0x06写单个寄存器
-
发送端:

第1个字节:ADR为驱动器地址(1-127),
第2个字节:0x06为功能码,表示写单个寄存器数据,
第 3、4 字节:要写的寄存器地址,
第 5、6 字节:要写的数据,
第 7、8 字节:从字节 1 到 6 的 CRC16 校验和。 -
驱动器回复:

-
当驱动器接收数据错误时,回复:

异常码:0x01表示功能码错误,0x02表示寄存器地址错误。
2.3、0x10写多个寄存器
-
发送端:

第1个字节:ADR为驱动器地址(1-127),
第2个字节:0x10为功能码,表示写多个寄存器数据,
第 3、4 字节:要写的寄存器起始地址,
第 5、6 字节:要写的寄存器数量,
第 7 字节:要写的数据总字节数,在当前通信协议中 字节总数=寄存器数量x2,
第 8到N+1 字节:寄存器数据,高字节在前,
第 N+2、N+3 字节: 从字节 1 到 N+1 的 CRC16 校验和。 -
驱动器回复:

-
当驱动器接收数据错误时,回复:

异常码:0x01表示功能码错误,0x02表示寄存器地址错误。
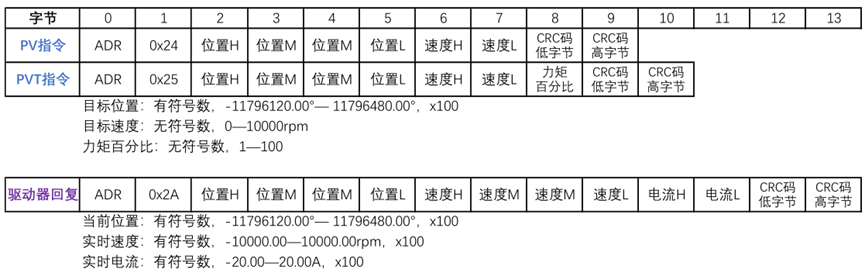
2.4、PVT指令
- PVT指令,只能在位置梯形轨迹模式时使用,可同时设置位置、速度和扭矩。驱动器回复实时位置、实时速度和实时电流。提高了通信效率,提高了操作灵活性。
- 注意,因为电机扭矩输出的非线性,“力矩百分比”并不是扭矩输出的绝对百分比,使用时,可多次尝试,找到合适的百分值。
- “力矩百分比”设置一次后,工作周期内一直有效,切换控制模式不改变百分比。
- “力矩百分比”不能保存,重启后恢复100%。
三、寄存器定义



四、指令说明
4.1 、 读取 电压
上位机发送:01 03 00 04 00 01 C5 CB

驱动器回复:01 03 02 00 78 B8 66
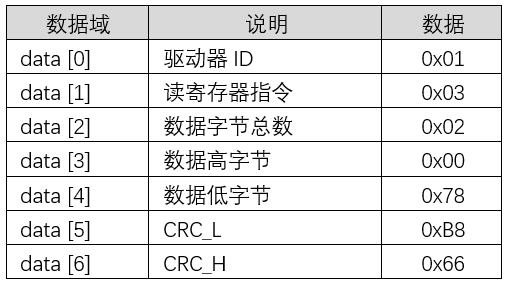
0x78=120,放大了 10 倍,电源电压为 12.0 V
4.2 、 读取母线电流
上位机发送:01 03 00 05 00 01 94 0B

驱动器回复:01 03 02 00 64 B9 AF
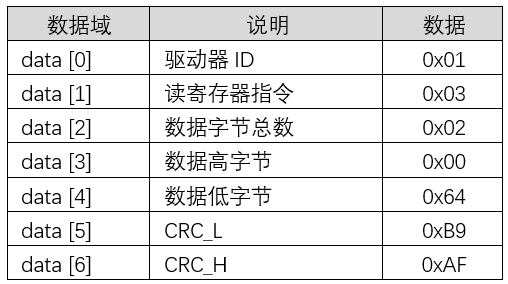
0x64=100,放大了 100 倍,母线电流为 1A
4.3、读取实时速度
上位机发送:01 03 00 06 00 02 24 0A

驱动器回复:01 03 04 00 00 C3 50 AA FF

0x0000C350=50000,放大了 100 倍,当前速度为 500 rpm,
假如回复:01 03 04 FF FF 3C 99 2B 7D
0xFFFF3C99=-50023,当前速度为-500.23 rpm,
4.4、读取实时位置
上位机发送:01 03 00 08 00 02 45 C9

驱动器回复:01 03 04 00 00 8C A0 9E 8B

0x00008CA0=36000,放大了 100 倍,当前位置为 360°,
假如回复:01 03 04 FF FF B9 83 C8 26
0xFFFFB983=-18045,放大了 100 倍,当前位置为-180.45°,
4.5、读取驱动器温度
上位机发送:01 03 00 0A 00 01 A4 08

驱动器回复:01 03 02 01 59 79 EE
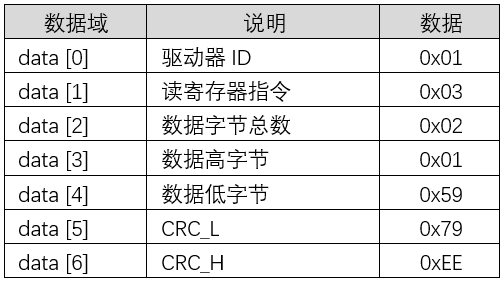
0x0159=345,放大了 10 倍,温度为 34.5°,
4.6、读取电机温度
上位机发送:01 03 00 0B 00 01 F5 C8

驱动器回复:01 03 02 02 37 F8 F2

0x0237=678,放大了 10 倍,母线电流为 67.8°,
4.7、读取错误信息
上位机发送:01 03 00 0C 00 02 04 08

驱动器回复:01 03 04 00 00 00 40 FB C3

故障码=0x40,表示编码器 SPI 通信故障。更多故障码请看第三节寄存器说明。
4.8、设置扭矩
设置扭矩为0.2Nm,放大了100倍,20=0x0014,
上位机发送:01 06 00 20 00 14 88 0F

驱动器回复:01 06 00 20 00 14 88 0F (与发送指令相同)
4.9、设置速度
设置速度500rpm,放大 100 倍,50000=0xC350,
上位机发送:01 10 00 21 00 02 04 00 00 C3 50 60 B7
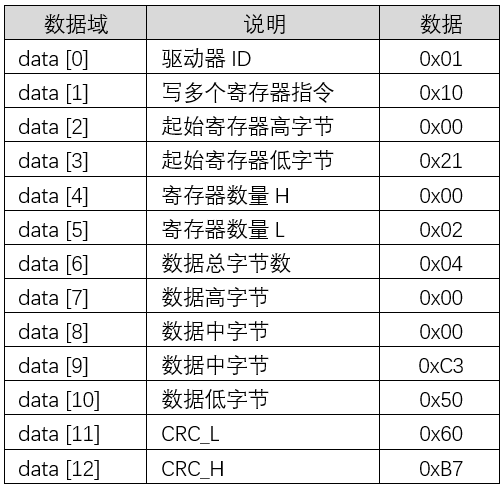
驱动器回复:01 10 00 21 00 02 11 C2

设置速度-500rpm,放大 100 倍,-50000=0xFFFF3CB0,
上位机发送:01 10 00 21 00 02 04 FF FF 3C B0 20 EB
驱动器回复:01 10 00 21 00 02 11 C2
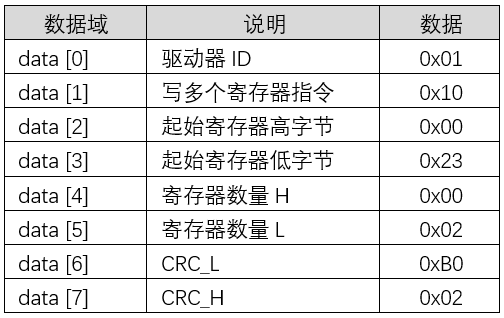
4.10、设置绝对位置
设置位置0°
上位机发送:01 10 00 23 00 02 04 00 00 00 00 B1 A2
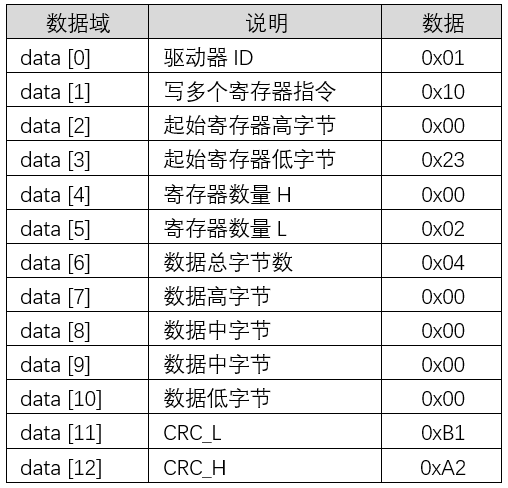
驱动器回复:01 10 00 23 00 02 B0 02
设置绝对位置360°,放大 100 倍,36000=0x8CA0,
上位机发送:01 10 00 23 00 02 04 00 00 8C A0 D5 1A
驱动器回复:01 10 00 23 00 02 B0 02
设置绝对位置-360°,放大 100 倍,-36000=0xFFFF7360,
上位机发送:01 10 00 23 00 02 04 FF FF 73 60 94 9E
驱动器回复:01 10 00 23 00 02 B0 02
4.11、设置相对位置
设置相对位置 360°,放大 100 倍,36000=0x8CA0,
上位机发送:01 10 00 25 00 02 04 00 00 8C A0 55 30
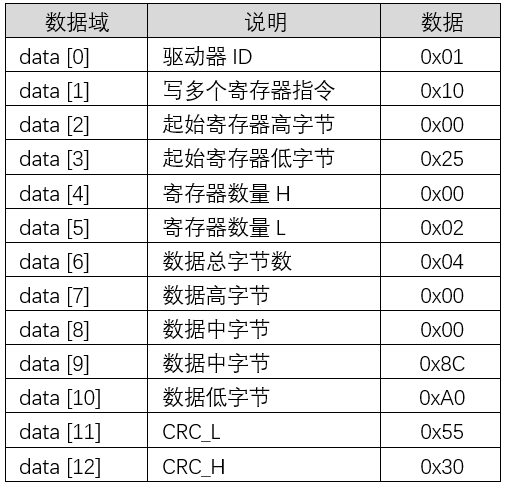
驱动器回复:01 10 00 25 00 02 50 03

设置相对位置-360°,放大 100 倍,-36000=0xFFFF7360,
上位机发送:01 10 00 25 00 02 04 FF FF 73 60 14 B4
驱动器回复:01 10 00 25 00 02 50 03
4.12、切换控制模式
假设当前为位置模式,切换为速度模式,
上位机发送:01 06 00 60 00 01 48 14

驱动器回复:01 06 00 60 00 01 48 14 (与发送指令相同)
4.13、空闲状态
上位机发送:01 06 00 A0 00 01 48 28

驱动器回复:01 06 00 A0 00 01 48 28 (与发送指令相同)
4.14、进入闭环
上位机发送:01 06 00 A2 00 01 E9 E8

驱动器回复:01 06 00 A2 00 01 E9 E8 (与发送指令相同)
4.15、重启
上位机发送:01 06 00 A5 00 01 58 29

驱动器回复:01 06 00 A5 00 01 58 29 (与发送指令相同)
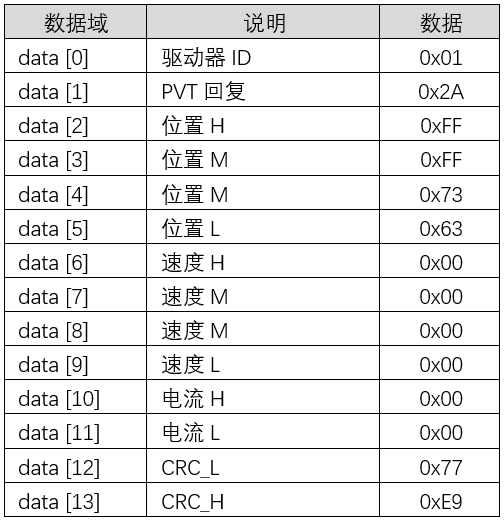
4.16、PVT指令
速度60rpm力矩80%转到位置0°
上位机发送:01 25 00 00 00 00 00 3C 50 D4 7B

驱动器回复:01 2A FF FF 73 63 00 00 00 00 00 00 77 E9
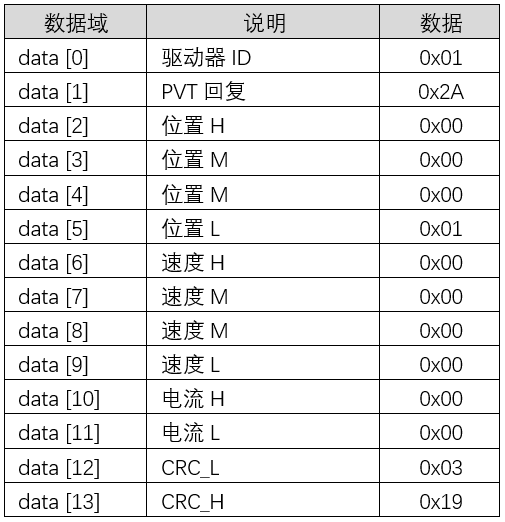
4.17、PV指令
速度120rpm转到位置360°
上位机发送:01 24 00 00 8C A0 00 78 CF 55

驱动器回复:01 2A 00 00 00 01 00 00 00 00 00 00 03 19
五、CRC16代码
代码直接复制到keil中,编译即可使用,
/* 高位字节的 CRC 值*/
static unsigned char auchCRCHi[256] = {
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,
0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01,
0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81,
0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01,
0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,
0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01,
0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,
0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01,
0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,
0x40
} ;
/* 低位字节的 CRC 值*/
static char auchCRCLo[256] = {
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7, 0x05, 0xC5, 0xC4,
0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09,
0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD,
0x1D, 0x1C, 0xDC, 0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32, 0x36, 0xF6, 0xF7,
0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,
0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE,
0x2E, 0x2F, 0xEF, 0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1, 0x63, 0xA3, 0xA2,
0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,
0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB,
0x7B, 0x7A, 0xBA, 0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0, 0x50, 0x90, 0x91,
0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,
0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88,
0x48, 0x49, 0x89, 0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83, 0x41, 0x81, 0x80,
0x40
};
unsigned short CRC16(unsigned char puchMsg, unsigned short usDataLen) //用于计算 CRC的数组, 数组长度
{
unsigned char uchCRCHi = 0xFF; / CRC 的高字节初始化*/
unsigned char uchCRCLo = 0xFF; /* CRC 的低字节初始化*/
unsigned uIndex ; /* CRC 查询表索引*/
while (usDataLen–) /* 完成整个数组缓冲区*/
{
uIndex = uchCRCLo ^ puchMsg++; / 计算 CRC */
uchCRCLo = uchCRCHi ^ auchCRCHi[uIndex];
uchCRCHi = auchCRCLo[uIndex];
}
return (uchCRCHi << 8 | uchCRCLo);
}
(完)
俱瓷科技