图解帕累托前沿(pareto frontier)
文章目录
- 核心概念
- 判断标准
- 以大模型推理优化为例
- 核心价值:指导“权衡选择”
- 高维帕累托前沿与实际应用
- 总结
核心概念
在多目标优化中,帕累托前沿是一组"无法再改进"的解的集合。对于前沿上的任意一点,要想改善一个目标,就必须牺牲另一个目标。
判断标准
- 如果方案X在所有目标上都不比方案Y差,且至少有一个目标比Y好,那么X"支配"Y
- 如果没有其他方案能支配某个方案,那么这个方案就是"非支配的",属于帕累托前沿
- 帕累托前沿,最终就是所有“非支配解”构成的集合(可以是一条曲线、一个平面,甚至更高维度的形状,维度由目标数量决定)。
以大模型推理优化为例
假设我们有两个冲突目标:
- 目标 1:推理延迟(越低越好,比如单位:ms);
- 目标 2:显存占用(越低越好,比如单位:GB)。
我们测试了 5 个不同的优化方案(如调整 batch size、量化精度、并行策略),结果如下:

将这5个方案画在“延迟-显存”坐标系中,帕累托前沿就是连接C、D、E三点的曲线(A、B因被支配,不在前沿上):
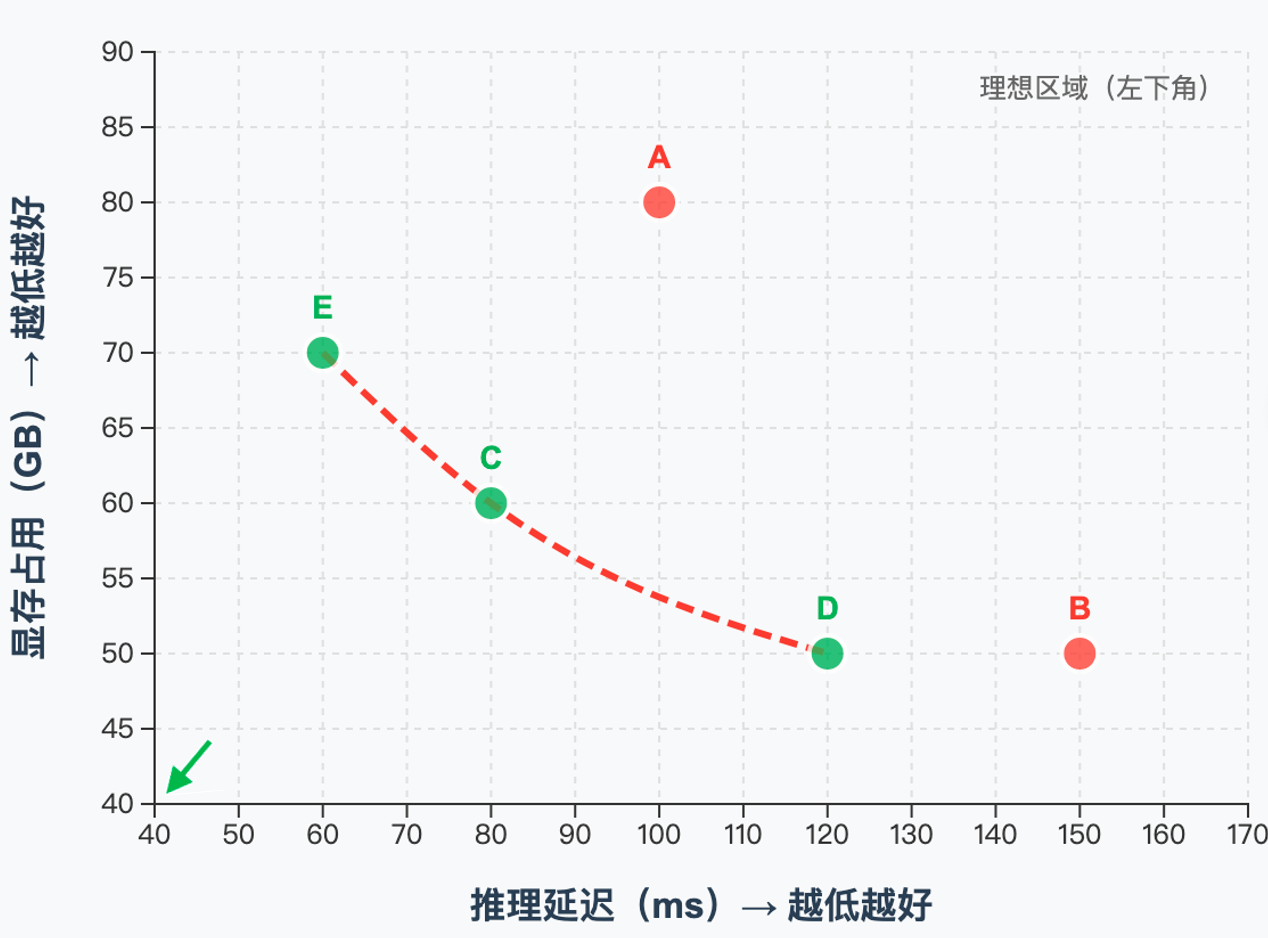
(示意图:横轴为延迟,纵轴为显存,前沿是“左下边界”,越靠近原点的前沿点越优)
核心价值:指导“权衡选择”
帕累托前沿本身不直接给出“唯一最优解”,而是提供“最优解集合”,核心价值在于:
- 筛选无效方案:直接淘汰所有“被支配解”(如上述A、B),减少决策成本;
- 量化目标权衡:前沿上的每个点对应一种“目标权衡策略”,比如:
- 选方案D:优先保证“显存占用最低”(50GB),接受更高延迟(120ms)——适合显存资源紧张的场景;
- 选方案E:优先保证“推理延迟最低”(60ms),接受更高显存(70GB)——适合低延迟需求的场景(如实时对话);
- 选方案C:延迟和显存“均衡最优”——适合通用场景;
- 优化方向指引:若当前方案不在前沿上(如A),则说明存在“无代价提升空间”(比如优化到C,既降延迟又降显存);若已在前沿上(如C),则要提升某一目标,必须接受另一目标的牺牲(比如想从C降到E的延迟,需多花10GB显存)。
高维帕累托前沿与实际应用
当优化目标超过2个(如“延迟、显存、准确率”三目标),帕累托前沿会从“曲线”变成“曲面”(3目标)或“超平面”(>3目标),难以直观可视化,但核心逻辑不变——仍是“非支配解的集合”。
在AI领域,帕累托前沿的典型应用包括:
- 大模型压缩:权衡“模型大小、推理速度、准确率”;
- 分布式训练:权衡“训练吞吐量、训练时长、资源利用率”;
- 推荐系统:权衡“推荐准确率、用户多样性、平台收益”。
总结
帕累托前沿是多目标冲突场景下的“最优解边界” ——它告诉我们“哪些方案是值得考虑的”,以及“要提升A目标,必须在B目标上付出多少代价”。最终选择哪个前沿上的方案,需结合具体场景的“目标优先级”(如显存紧张选D,低延迟选E),而非绝对的“哪个更好”。