航电系统路径规划技术解析
一、运行方式
航电系统路径规划模块的运行是一个多阶段闭环决策过程,其核心运行机制可以概括为以下几个关键阶段:
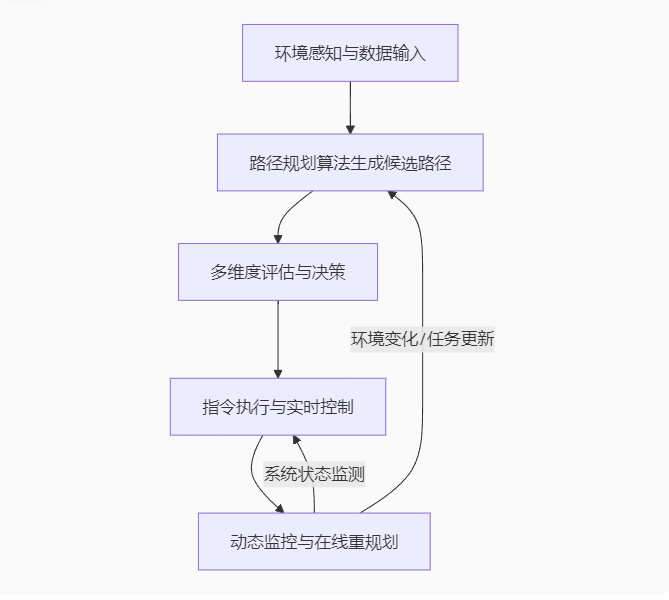
1.环境感知与数据输入:模块首先会实时接收并处理多源信息,包括来自GPS、惯性导航系统(INS)、北斗等定位技术的导航数据,雷达、视觉SLAM等传感器数据,以及气象数据、地形信息、空域限制、敌方威胁(军用)等静态和动态环境信息。
2.路径规划算法生成候选路径:基于预处理的环境模型和给定的任务目标(如到达点、时间约束、燃料约束),核心的路径搜索算法(如改进A*、改进蚁群算法等)会在解空间中搜索一条或多条满足基本避障要求的可行路径。
3.多维度评估与决策:系统会对这些候选路径进行多维度评估(如路径长度、燃油消耗、威胁概率、转弯次数、电磁兼容性),并依据任务的实时需求和优先级进行决策,筛选出当前最优路径或进行多路径备份。
4.指令执行与实时控制:规划出的路径(通常由一系列航点构成)将转化为具体的飞行控制指令(如舵面偏转、油门控制),引导飞行器沿预定轨迹飞行。
5.动态监控与在线重规划:模块会持续监控外部环境的变化(如突发威胁、天气突变)和系统自身状态(如燃料余量、设备故障)。一旦检测到当前路径不再安全或最优,或接收到新的任务指令,触发重规划机制,形成一个闭环系统。
二、技术要点
1.核心搜索算法的改进与融合:
改进A*算法:广泛用于静态或已知环境中的最优路径搜索。其改进通常在估价函数(Heuristic Function)中引入弯折因子、方向引导因子、障碍物排斥因子等,以在缩短路径的同时减少转弯和穿越危险区域的次数,满足线缆布设或飞行的物理约束。
改进随机搜索算法(如RRT):适用于高维、复杂动态环境的快速探索。通过引入偏向目标点的采样策略、路径修剪优化等改进,提高搜索效率和路径质量。
群体智能优化算法(如蚁群、粒子群):适用于多目标、多约束的优化问题,如多线缆布局。通过自适应信息素更新、引入遗传变异操作等改进,防止早熟收敛,提升全局搜索能力。
融合算法:常将不同算法进行融合,如先用快速算法(如RRT)生成初始路径,再用优化算法(如蚁群、遗传算法)进行平滑和优化,兼顾效率与质量。
2.环境建模与栅格化处理:将连续的飞行空间或设备内部空间离散化为均匀或非均匀的栅格(Voxel Grid),并为每个栅格赋予丰富的属性信息(权值编码),如是否可通过、地形高度、威胁等级、电磁强度、热度、是否便于固定等,为算法提供决策依据。
3.多传感器融合与高精度导航:融合GPS、INS、视觉、雷达等多种传感器的数据,通过卡尔曼滤波等技术,提供厘米级的高精度、高可靠性的定位和姿态信息,为路径规划提供准确的自身状态输入。
4.多约束建模与处理:路径规划需综合考虑多种约束:
物理约束:飞行器/线缆的最小转弯半径、最大爬升率、机动性能。
任务约束:燃料限制、时间窗口、侦察目标优先级。
环境约束:避障(地形、建筑、其他飞行器)、规避威胁区(敌方雷达、导弹射程、恶劣气象)、电磁兼容性(线缆间减少串扰)。
工程约束:航空线缆需贴近结构件便于捆扎固定、避免尖锐弯折。
5.自适应与智能决策技术:采用强化学习(Reinforcement Learning) 算法,使系统能在与环境的交互中自主学习最优决策策略,适应未知或高度动态的环境。
三、技术难点及解决策略
1.复杂环境下的实时性要求:
难点:环境快速变化,要求路径规划必须在极短时间(如毫秒到秒级)内完成,计算复杂度高的算法难以满足实时性要求。
解决思路:采用改进的高效搜索算法(如针对性改进A*算法);分层规划策略(先粗规划再局部精细规划);预设方案与在线调整相结合;利用高性能计算硬件(如GPU、FPGA)加速。
2.动态不确定性环境的处理:
难点:敌方威胁、移动障碍物、突发气象等具有高度不确定性,预先规划的路径可能迅速失效。
解决思路:集成实时环境感知与预测技术;采用滚动时域规划(Receding Horizon Planning),周期性地基于当前状态重新规划;引入机器学习方法预测动态障碍物意图或环境变化趋势。
3.多目标多约束的优化权衡:
难点:路径长度、风险、燃料、时间等多个目标往往相互冲突,难以找到绝对最优解。多种物理和工程约束也增加了搜索空间的复杂性。
解决思路:采用多目标优化算法(如NSGA-II),得到一组帕累托最优(Pareto Optimal) 解集,供决策者选择;设计合理的加权代价函数,将多目标转化为单目标优化。
4.可靠性、安全性保障与验证:
难点:航电系统对安全性和可靠性要求极高,算法本身的故障或规划失误可能导致严重后果。
解决思路:采用冗余设计(如主备多路径);严格的算法验证与确认(V&V),包括大量仿真测试(如数字孪生技术)、硬件在环测试和实物试验;遵循DO-178C等航空电子软件安全标准进行开发。
5.资源竞争与任务调度:
难点:当存在多任务或多条路径规划需求时,会竞争有限的计算资源、通信资源(如波束驻留时间)和跟踪资源。
解决思路:采用动态优先级调度算法(如基于强化学习),根据任务关键性和资源余量自适应分配资源;混合关键级调度(如ARINC 653分区操作系统),隔离不同优先级任务,保障高关键任务资源。
四、未来发展趋势
1.人工智能的深度融合:深度学习用于环境感知与特征提取;深度强化学习用于复杂决策;脉冲神经网络(SNN) 探索低功耗类脑计算。
2.数字孪生(Digital Twin)与高保真仿真:构建高保真的虚拟飞行环境,在仿真中加速测试和验证各种复杂的路径规划策略和算法,大幅降低实装测试风险和成本。
3.协同规划与集群智能:多飞行器/无人机集群的协同路径规划,实现分布式任务分配和自组织协作。
4.边缘-云协同计算:部分计算密集型任务(如全局优化、深度学习推理)可卸载至云端或地面站,减轻机载计算负荷,同时利用边缘设备保证实时性任务的响应。
5.更高程度的自主化:从按预定航点飞行,向任务级自主(只需告知目标,系统自行规划如何完成)和全自主决策演进。
