软件工程师的机械原理基础知识

对于从事软件开发(需要与硬件交互、机器人、游戏物理、工业控制等方向的开发者),了解基础的机械原理能帮助你更好地理解硬件行为、优化交互逻辑,甚至与机械工程师高效协作。以下是最核心、最通俗的机械原理知识点整理,结合软件开发场景说明:
一、基础力学:理解“力的作用”是硬件行为的底层逻辑
软件控制硬件时,本质是通过指令让硬件(如电机、机械臂)产生“力”或“运动”,而力学是分析这些行为的基础。
1. 力与力矩:让物体“动起来”或“保持平衡”
- 力:推动物体运动的“推力/拉力”(单位:牛,N)。
软件场景:机械臂抓取物体时,需计算“抓取力”是否大于物体重力(否则抓不住);无人机悬停时,螺旋桨升力需等于总重力(否则坠落)。 - 力矩:力绕某一点的“旋转效果”(力矩=力×力臂,单位:牛·米,N·m)。
软件场景:机械臂关节旋转时,需计算负载产生的力矩(如机械臂末端挂重物,手臂越长力臂越大,电机需输出更大扭矩才能转动,否则会“卡住”)。
2. 摩擦力:阻碍运动的“隐形手”
- 静摩擦:物体静止时,需超过最大静摩擦力才会开始运动(如推箱子,轻推不动,用力推才动)。
软件场景:移动机器人启动时,电机需输出足够扭矩克服地面静摩擦(否则打滑);机械臂关节静止时,需考虑静摩擦导致的“静误差”(指令归零后实际位置可能偏移)。 - 动摩擦:物体运动时的阻力(通常小于静摩擦)。
软件场景:机器人匀速移动时,电机只需抵消动摩擦(若动力过大可能加速,过小则减速)。
3. 惯性:物体“抗拒变化”的本性(牛顿第一定律)
- 物体质量越大,惯性越大(保持原有运动状态的倾向)。
软件场景:工业机械臂快速停止时,负载的惯性可能导致“超调”(机械臂因惯性继续运动,超出目标位置);无人机急转弯时,需提前调整电机转速抵消惯性(否则侧翻)。
二、运动学:让硬件“按规划动起来”
软件控制机械运动(如机械臂、机器人)时,需明确“如何从A点移动到B点”,这依赖运动学知识。
1. 自由度(DOF, Degree of Freedom):决定“能做什么动作”
- 自由度指物体独立运动的方式数量(如平移、旋转)。
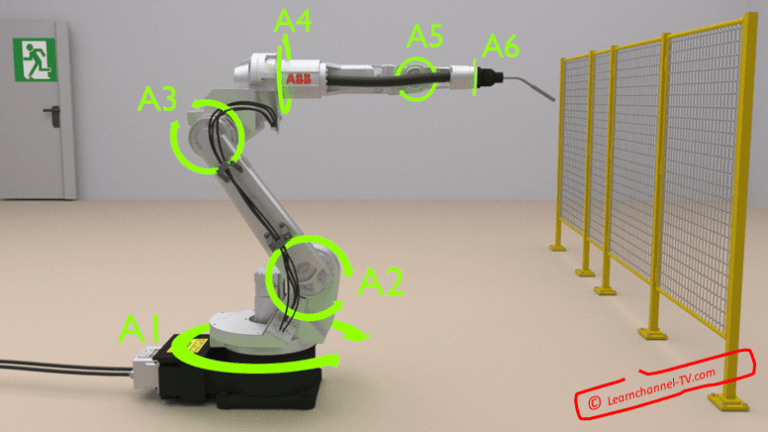
常见模型:- 机械臂:每个旋转关节算1个自由度(如6轴机械臂有6个旋转关节,可模拟人类手臂的大部分动作);
- 移动机器人:轮式机器人(如差速驱动)有2个平移自由度(前后、左右)+1个旋转自由度(转向),共3个自由度。
软件意义:自由度决定了机械的“能力边界”(如6轴机械臂无法钻到桌子底下,因为缺少俯仰自由度);规划路径时需确保目标点在机械的自由度范围内(否则无法到达)。
2. 关节与坐标系:统一“机器语言”与“软件语言”
- 关节类型:
- 旋转关节(R):像门轴一样转动(如机械臂肘部);
- 平移关节(P):沿直线滑动(如机械臂伸缩杆)。
- 坐标系:为机械各部分定义“位置基准”(如世界坐标系、机械臂基坐标系、末端执行器坐标系)。
软件意义:软件需通过坐标变换(如将末端执行器的目标位置从“世界坐标”转换为“关节角度”),才能向机械发送控制指令(类似将“向前走1米”转换为“左轮转50度,右轮转30度”)。
三、传动系统:连接“电机”与“执行端”的桥梁
电机(软件直接控制)通常转速高、扭矩小,而机械执行端(如机械臂、车轮)需要低转速、高扭矩,传动系统负责“转换”运动形式。
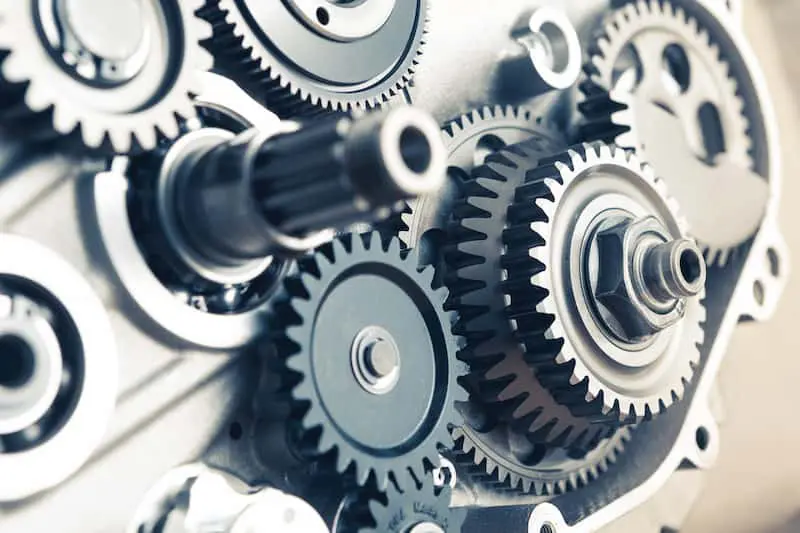
1. 齿轮:改变“速度”与“扭矩”
- 齿轮传动的核心公式:转速比=从动轮齿数/主动轮齿数,扭矩比=主动轮齿数/从动轮齿数(忽略损耗)。
例子:主动轮(电机端)10齿,从动轮(负载端)30齿 → 转速降为1/3(电机转3圈,从动轮转1圈),扭矩放大3倍(适合需要大力矩的场景,如机械臂关节)。
软件意义:已知电机转速,可通过传动比计算负载实际转速(如软件发送“电机转3000转/分钟”,通过1:3齿轮传动,负载实际转速为1000转/分钟)。

2. 丝杠/皮带:直线运动与旋转运动的转换
- 丝杠(滚珠丝杠):旋转运动→直线运动(如电机转1圈,丝杠推动滑块前进“导程”,常见导程5mm、10mm)。
软件意义:软件控制电机转n圈,可精确计算滑块移动距离(n×导程),用于精密定位(如3D打印机的喷头移动)。 - 皮带/链条:通过带轮或链轮传递运动(成本低、有弹性)。
软件意义:弹性可能导致“丢步”(电机指令与实际位移有误差),需软件补偿(如通过编码器反馈修正)。
四、传感器与执行器:软件与硬件的“交互接口”
软件需通过传感器获取硬件状态(如位置、速度),通过执行器(如电机、舵机)驱动硬件,需理解其特性才能正确交互。

1. 传感器的“不完美”:噪声与校准
- 常见传感器:
- 编码器(测电机转速/位置);
- 加速度计(测加速度/倾斜角度);
- 力传感器(测接触力)。
- 特性:传感器输出可能有噪声(如电压波动导致数据跳变)、非线性(输出与实际值不成正比)、延迟(信号传输需要时间)。
软件应对:- 滤波(如用卡尔曼滤波平滑加速度计数据);
- 校准(通过已知标准值修正传感器偏差,如用砝码校准力传感器);
- 时间同步(补偿传感器延迟,避免软件控制与实际动作不同步)。
2. 执行器的“延迟”与“饱和”
- 电机:接收软件指令后,启动/停止需要时间(如步进电机加速到稳定转速需几毫秒)。
- 液压/气动执行器:压力变化导致动作延迟更明显。
软件应对:控制指令需预留“缓冲时间”(如要求电机在1秒内转到1000转,需提前0.2秒发送加速指令);避免“饱和”(如电机最大转速1000转/分钟,软件指令不要超过此值,否则无效)。
五、简单材料与结构:避免“硬件拖后腿”
软件设计的性能可能受限于硬件结构(如机械强度不足导致变形),需了解基础材料特性。
1. 弹性形变:太“软”的结构会“变形”
- 胡克定律:力=弹性模量×截面积×形变量/长度(材料越硬、截面积越大,越难变形)。
软件场景:机械臂悬臂梁(一端固定,另一端受力)过长会导致末端偏移(形变量大),影响定位精度;软件需预留“误差补偿”(如根据负载重量计算偏移量,修正目标位置)。
2. 疲劳:长期使用会“累坏”
- 材料反复受力(如机械臂每天升降1000次),即使应力低于强度极限,也可能逐渐断裂。
软件意义:记录机械运行时间(如“已升降50万次”),触发维护提醒(避免突然故障导致软件失控)。

总结:软件开发者为何需要这些?
机械原理不是让软件工程师变成机械设计师,而是帮你:
- 理解硬件行为(如“机械臂卡住”可能是力矩不足,而非软件指令错误);
- 优化交互逻辑(如根据传动比计算实际位移,避免软件误判位置);
- 高效协作(与机械工程师沟通时,能听懂“自由度”“传动比”等术语,明确需求边界)。