控制系统仿真之PID校正-PID校正(八)
一、理论基础
当PID合在一起时,在系统中加入比例、积分、微分器。此时系统的传递函数为

Kp、Ki、Kd三个参数的选择一般根据经验公式确定一个大致范围,通过simulink逐步校正。
二、实际仿真
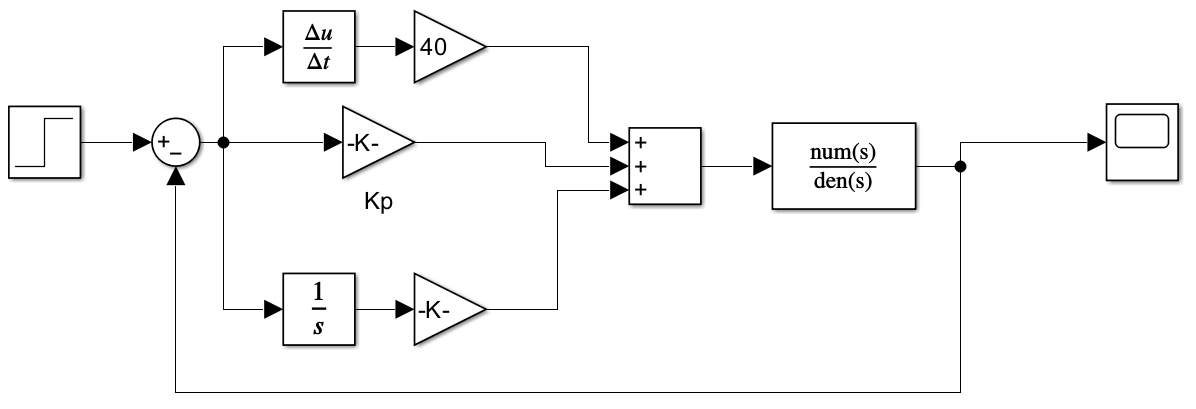
三、效果
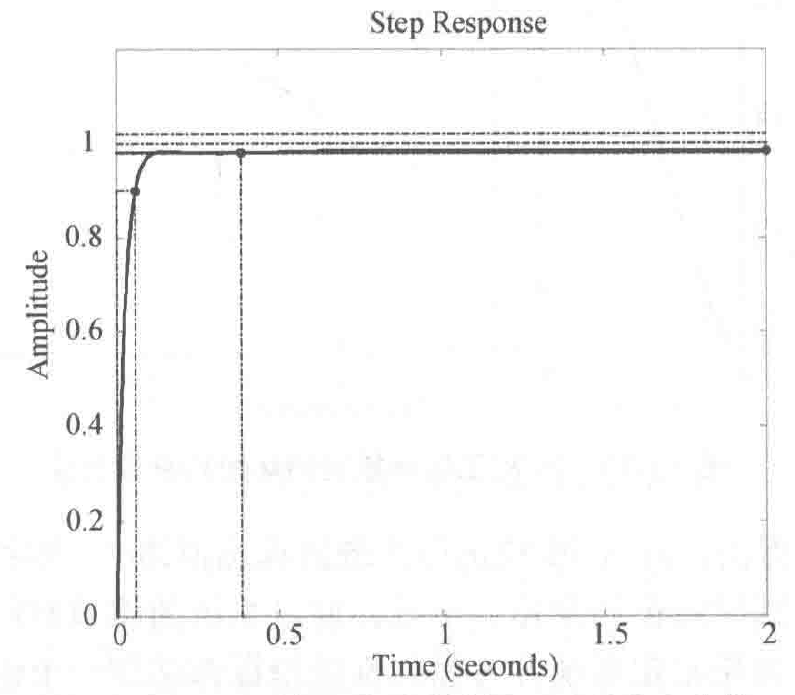
按照教材上取值,Kp=400,Ki=400,Kd=40,与教材上的曲线并不相同。
教材曲线:
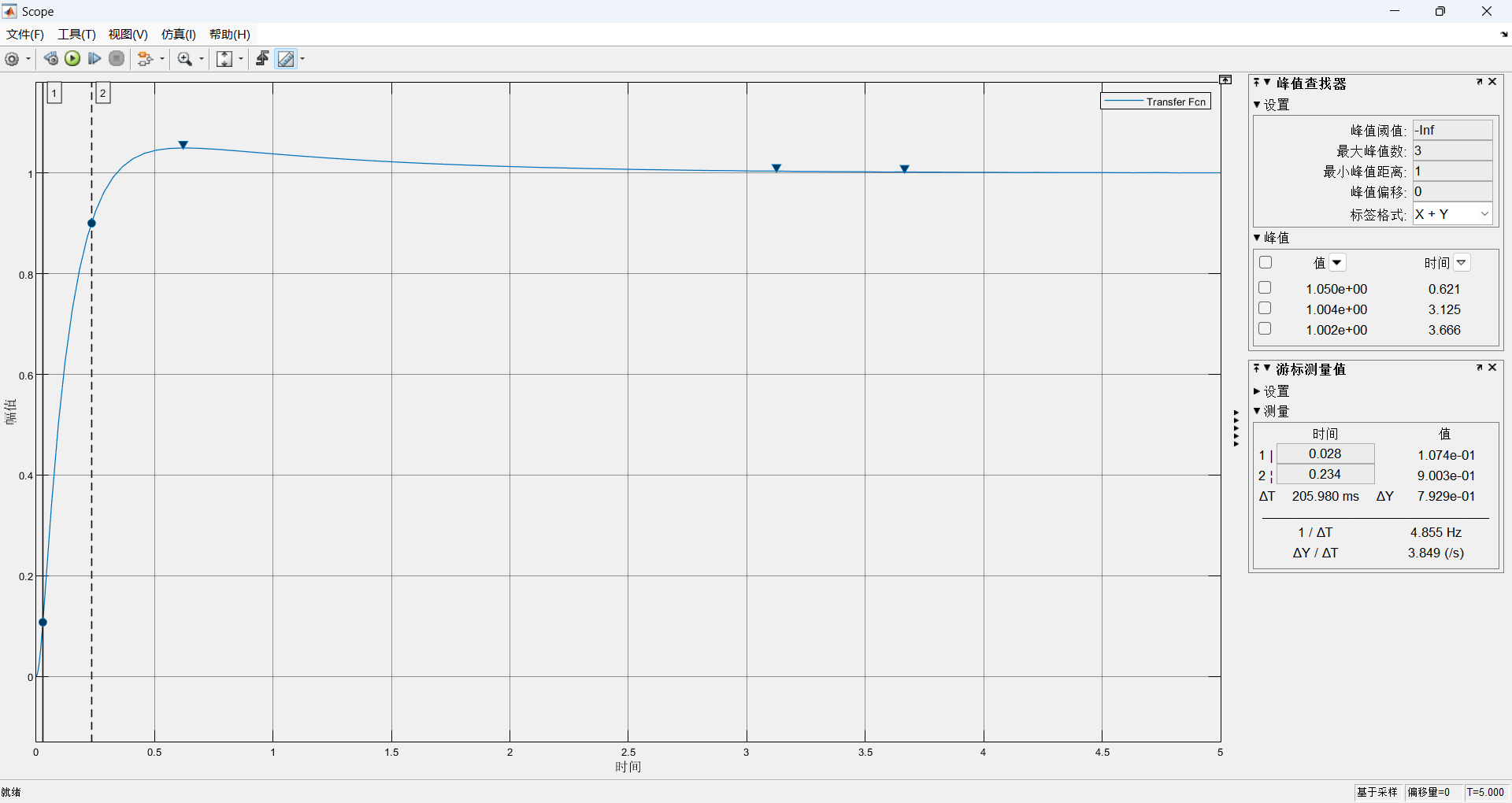
实际曲线:
稳态误差0.001,上升时间0.205s,超调量5%。
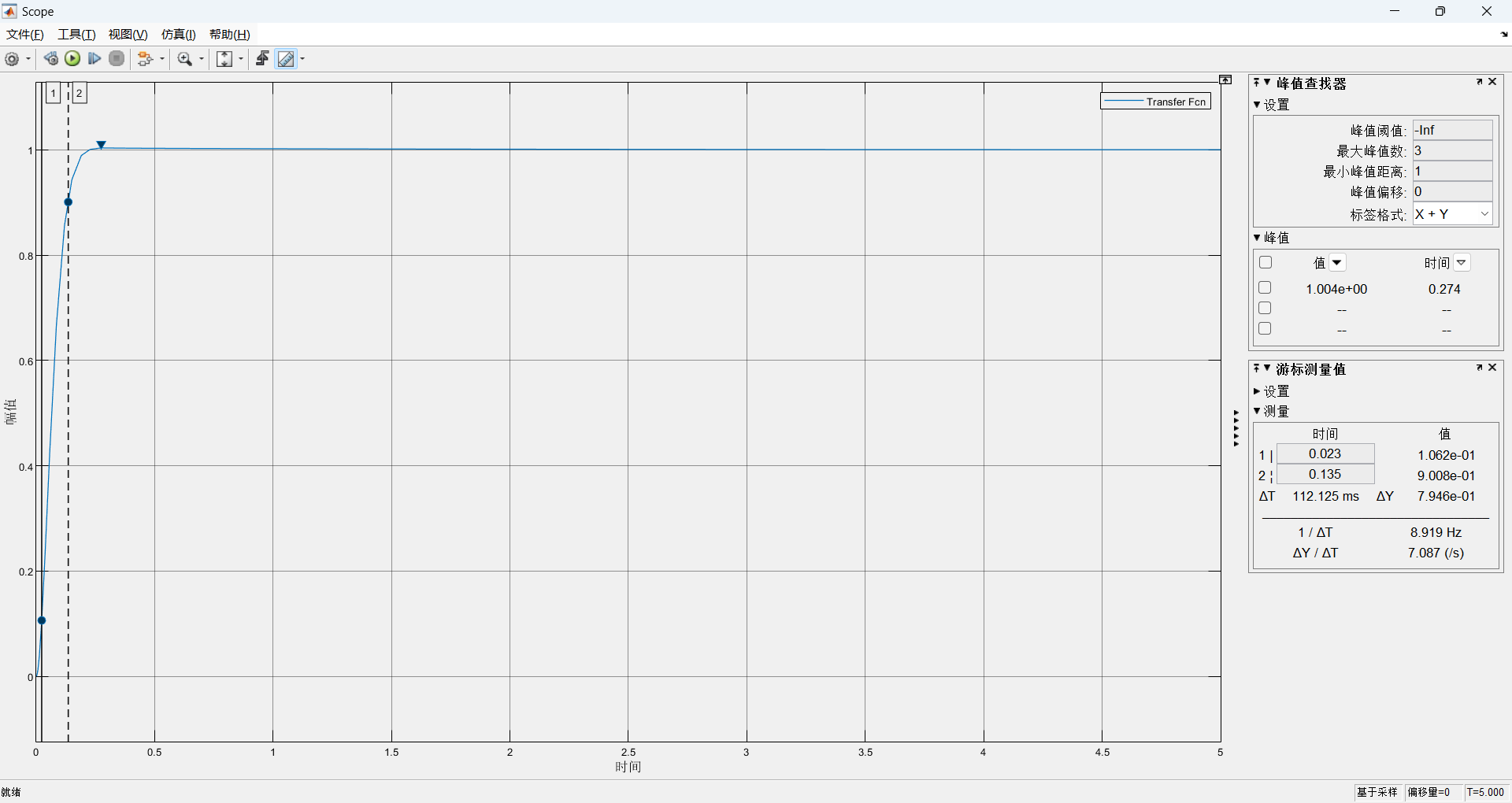
自己调了个Kp=500,Ki=300,Kd=25,响应曲线效果还可以。
稳态误差0.000,上升时间0.112s,超调量0.4%。