基于Python+AlphaBot 实现红外遥控且自动避障的嵌入式智能小车系统
智能系统中的嵌入式应用
1. 实验目的
嵌入式系统(Embedded System),是一种嵌入机械或电气系统内部、具有专一功能和实时计算性能的计算机系统。
嵌入式计算机是面向应用、面向产品的、具有特定用途的计算机。它们没有刻意被制造成计算机的形态,往往以产品本身的形式展现在用户面前。
本次实验使用树莓派作为开发平台,AlphaBot 作为开发载体,Python 作为开发语言,开发一种基于红外线遥控控制的、可自动避障的嵌入式智能小车系统。
2. 实验介绍
2.1 树莓派介绍
树莓派结构简单、体积小、耗电低,却拥有与普通计算机几乎相同的功能和性能,可以很方便地植入到各种应用系统中。此类单板计算机是典型的嵌入式系统的基础。
2.2 AlphaBot2 介绍
AlphaBot2 智能车开发套件,包含一个基板 AlphaBot2-Base 和一个适配板(AlphaBot2-Ar、AlphaBot2-Pi、AlphaBot2-PiZero 三者之一)。其结构稳定,集成度高,不用复杂的组装以及繁琐的接线,有助于快速学习嵌入式系统开发。
2.3 Python 介绍
Python 有着大量支持嵌入式系统开发的第三方库,例如 RPi.GPIO 等。以 Python 作为开发语言,可以避免直接与底层交互,将主要精力放在高层抽象逻辑上。
3. 实验内容
源码见附录处。
3.1 实验方法
本次实验使用 Python 的第三方库 RPi.GPIO 和 rpi_ws281x,实现小车的红外控制、led 控制、蜂鸣器控制、超声波自动避障。
3.2 实验流程
3.2.1 智能小车组装
本次实验用到的智能小车组件:
- AlphaBot2-Base(基板)
- AlphaBot2-Pi(适配板)
- 树莓派
- 蜂鸣器
- 红外遥控器
- 超声波探测器
根据 AlphaBot2 智能小车官网教程,组装智能小车。
官网链接见附录,具体路径为:资料 -> AlphaBot2 原理图/组装图 -> AlphaBot2-Pi 组装图。
3.2.2 生产环境配置
本次实验的特殊性在于,生产环境无法直接测试代码,必须将代码移植到树莓派上才可以测试。
生产环境只需代码编辑器即可,以 vscode 和 PyCharm 为佳。
3.2.3 Python 代码实现
系统模块如下表所示:
| 模块名 | 文件名 | 依赖模块 | 功能 |
| app | app.py | lib util | 系统的入口文件 |
| lib | pithon.py | uitl | 小车状态的转换和任务调度 |
| lib | alphabot.py | uitl | 小车驱动控制 |
| lib | led.py | 小车 led 控制 | |
| lib | infrared.py | util | 红外线解码 |
| lib | buzzer.py | util | 小车蜂鸣器控制 |
| lib | ultrasonic.py | util | 超声波测距 |
| util | gpio.py | GPIO 初始化以及常量配置 | |
| util | state.py | 小车状态枚举类 |
以下是详细介绍。
注:本部分较为冗长且非必需,如有需要请结合代码查阅。
3.2.3.1 app.py
系统入口为app.py。
app.py的任务是:初始化 GPIO channels,创建小车实例,开始监听,并在小车系统退出后清除 GPIO 设置。
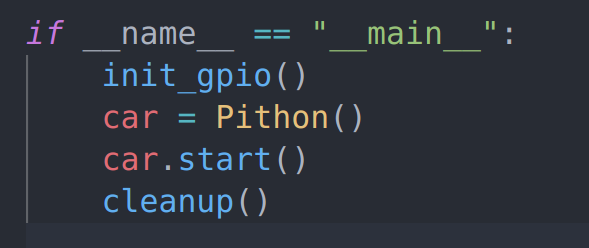
init_gpio()职责是在系统启动时唯一初始化 GPIO channels,源码在util/gpio.py中。
Pithon为对应小车的实体类,具体实现在util/pithon.py中。
3.2.3.2 lib/pithon.py
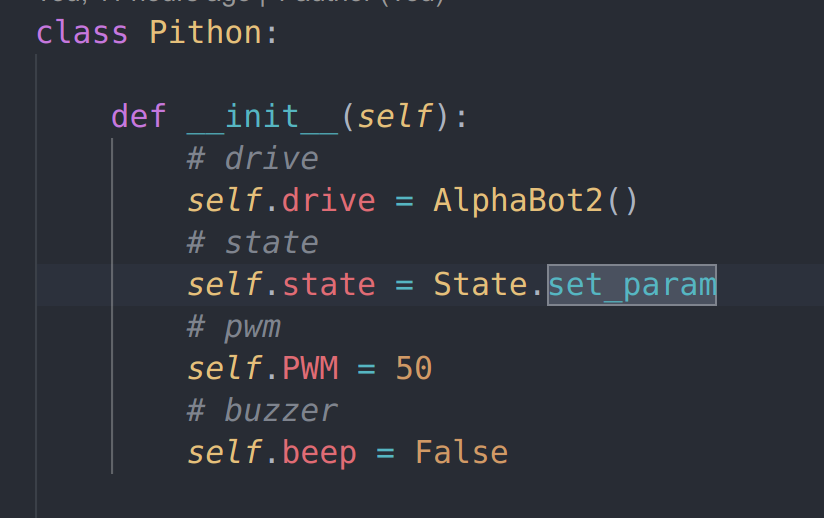
self.drive为掌控小车驱动的实体类,其实现在lib/alphabot.py中,提供了前进、后退、停止、左转、右转、加速、减速的驱动实现。
self.state为枚举类State的实例,具体实现在util/state.py中。一共三个属性set_param、auto_run、manual,分别对应三种状态。
self.PWM为小车的速度。
self.beep为小车蜂鸣器的开关。
该实例的启动函数为self.start()。职责为创建一条监听线程监听红外线信号。
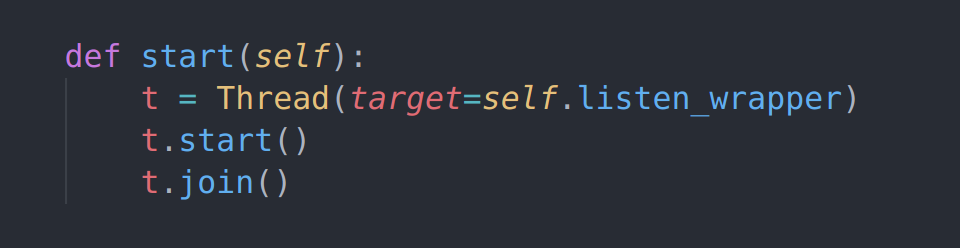
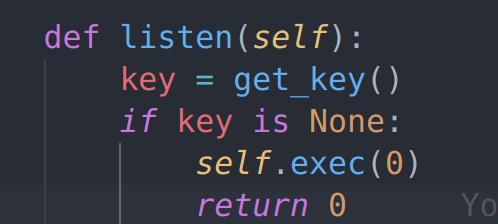
self.listen()负责监听、处理红外信号。辅助函数为get_key(),实现在util/infrared.py中,有红外信号则返回信号,没有则返回None。
当没有红外信号时,小车保持当前状态。
如上图所示,如果是在auto_run模式下,小车会持续通过超声波获取距离,而后选择避障与否。如果实在manual模式下,会不作处理即保持当前运行状态。
超声波测距的实现在util/ultrasonic.py中。
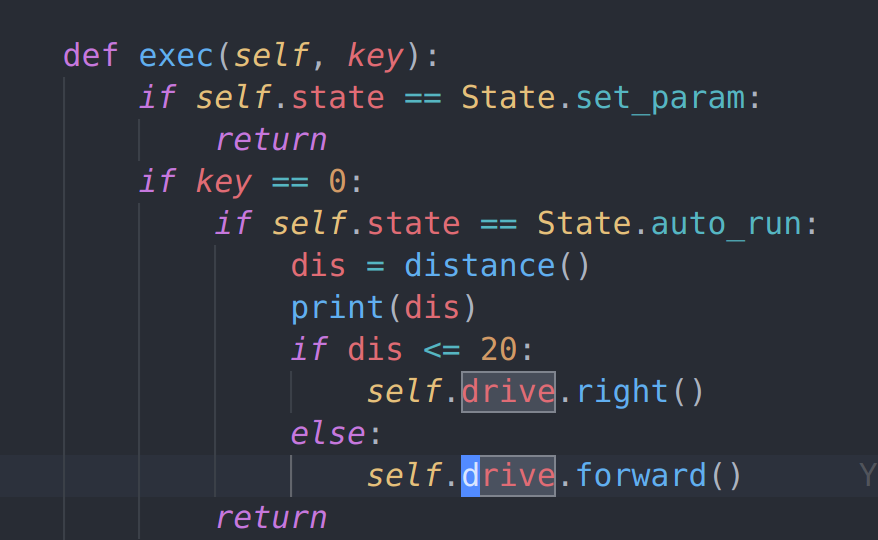
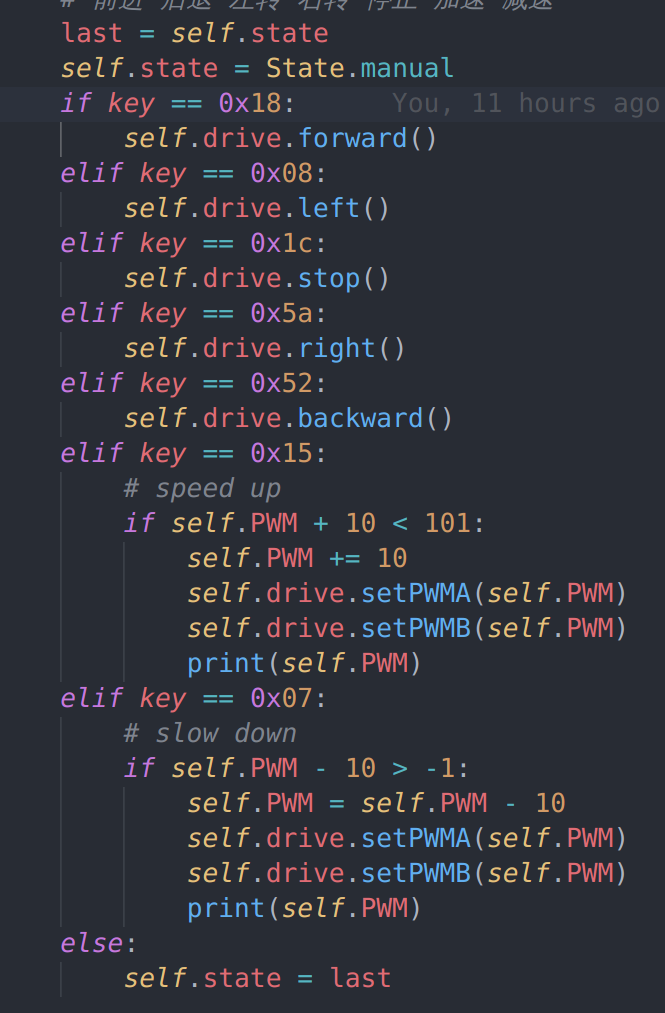
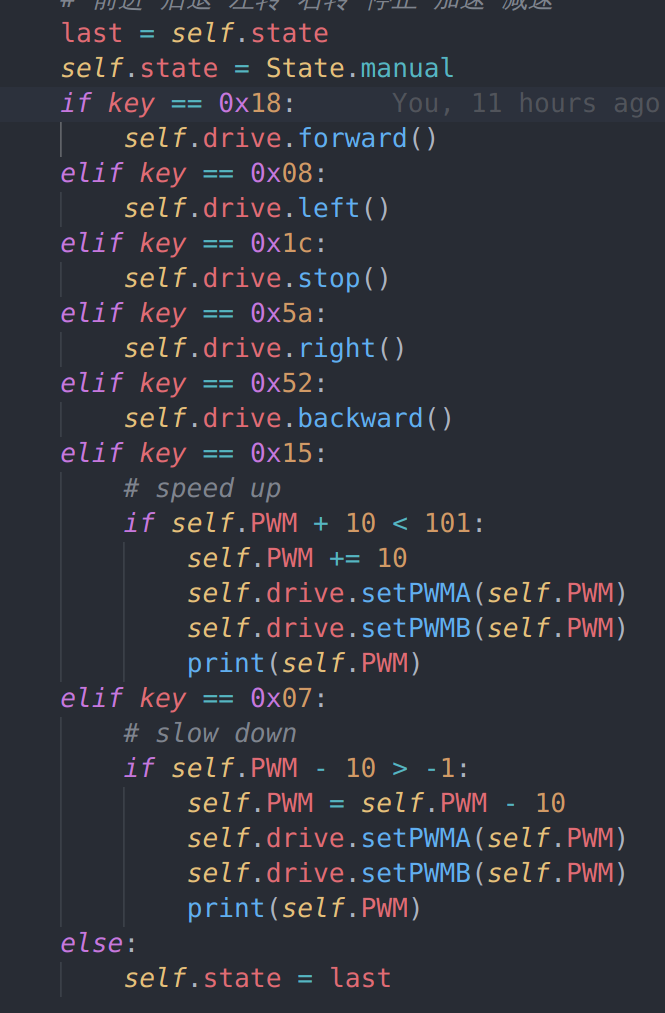
若有红外信号,则根据当前状态进行有选择性的处理。
如上图所示,1 号按钮使函数返回 1,系统退出。
在set_param模式下,小车可以接收 0、1、2、5 号按钮的指令,进行相应的处理。
其中 0 号按钮控制 led,实现在util/led.py中,2 号按钮控制蜂鸣器,实现在util/buzzer.py中。
在auto_run模式下,只有 1、5 号按钮会改变小车状态。
在manual模式下,5 号按钮会改变小车状态,其余按钮在self.exec()函数中进行有选择性的处理。
更详细实现请自行阅读源码。
3.2.4 树莓派测试环境配置
使用 ssh 连接树莓派。
ssh root@192.168.208.124其中 ipv4 地址、用户名和密码视树莓派配置而定。
安装必要的依赖: RPi.GPIO 库,以及 rpi_ws281x 库。
安装方法以 RPi.GPIO 为例:
git clone https://github.com/yfang1644/RPi.GPIO.git
cd RPi.GPIO
python3 setup.py build
python3 setup.py install
cd ..
rm -rf RPi.GPIO系统时间的不同步可能会导致安装失败。最佳方式是将系统时间同步后再进行 clone。
使用 scp 将生产环境代码复制至树莓派自定义位置,此处假设项目根目录为~/code/pithon,入口文件为app.py。
scp -r /path/to/your/codedir root@192.168.208.124:~/code/给app.py设置可执行权限:
cd ~/code/pithon
chmod u+x app.py为达到开机自动启动的效果,需要编写自定义脚本alphabot.sh:
cd /home/<user-name>/code/pithon
setsid ./app.py # 创建守护进程alphabot.sh同样需要设置可执行权限,方法同上。
将脚本移动到/etc/init.d文件夹中,并将脚本名放至/etc/rc.d/rc.conf文件中的cfg_services列表的倒数第二个位置。
3.2.5 运行智能小车
上述步骤完成后,重启小车即可开机自动启动智能系统。
具体运行方式见实验结果部分。
4. 实验结果
小车能够较成功运行。
以下流程均假设小车已经完成树莓派测试环境环境配置。
4.1 控制途径
小车使用红外遥控器进行控制。
红外遥控器如下图所示:
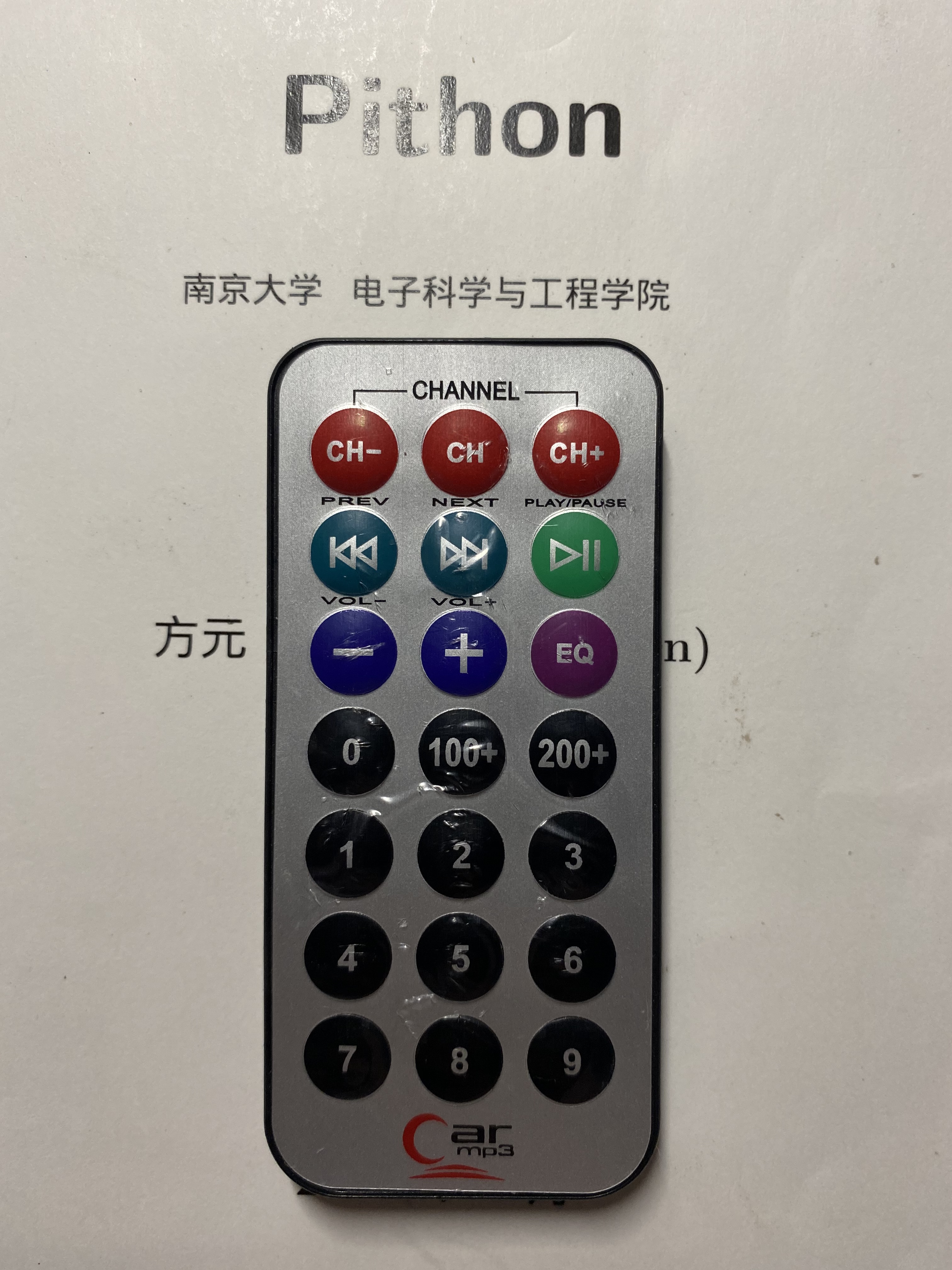
自左向右,自上而下编号,将遥控器按钮编码为 0-20。
例如,第一排第三个编号为 2,第二排第三个编号为 5。
4.2 运行时模式
小车运行时共有三种模式:
- set_param.
- auto_run.
- manual.
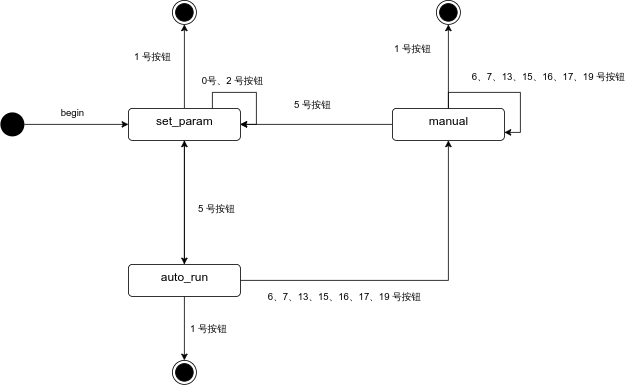
小车开机自动启动,进入 set_param 模式。
set_param 模式下,小车不移动。按 0 号按钮可以短暂启动 LED,按 2 号按纽可以启动蜂鸣器,按 5 号按钮进入 auto_run 模式。
auto_run 模式下,小车自动移动,并使用超声波测距来自动避障。按 5 号按钮进入 set_param 模式,按 6、7、13、15、16、17、19 号按钮进入 manual 模式。
manual 模式下,小车由遥控器手动控制。其中,6、7 号分别为加速、减速,13、15、16、17、19 号分别为前进、左转、停止、右转、后退。按 5 号按钮进入 set_param 模式。
在三种模式下,按 1 号按钮都会直接退出系统。
具体的状态图如下:
运行视频见附录。
5. 收获与不足
本次实验较成功完成了以 AlphaBot2 为硬件基础,Linux 为开发环境,Python 为开发语言开发运行智能小车系统的实验。
通过本次实验,我初步了解了嵌入式编程的开发流程和编程范式,了解了树莓派和 alphabot 等一系列嵌入式开发套件,为我以后选择软件学院嵌入式系统方向的课程打下基础。
但智能小车系统仍然有许多不足之处:
- 功能不够完备,led 灯无法保持长时间闪烁,也没有实现自动寻迹功能。
- 代码的架构不够优秀,
pithon.py文件承担了大部分的调度功能,而这类情况本可以使用task类避免。同时只使用了两条线程,并发性不足。 - 异常处理不完备。小车运行时有时会遇到超声波模块卡死的情况,此时小车无法进行其他操作,只能手动强行关机。