ZMC900E如何实现多主站协同控制?
EtherCAT是高效工业以太网总线,基于以太网技术,以“飞读飞写”实现微秒级同步。连接控制器与终端设备,简化布线,适配多节点,是高端自动化与智能制造的重要通信方案。
前言
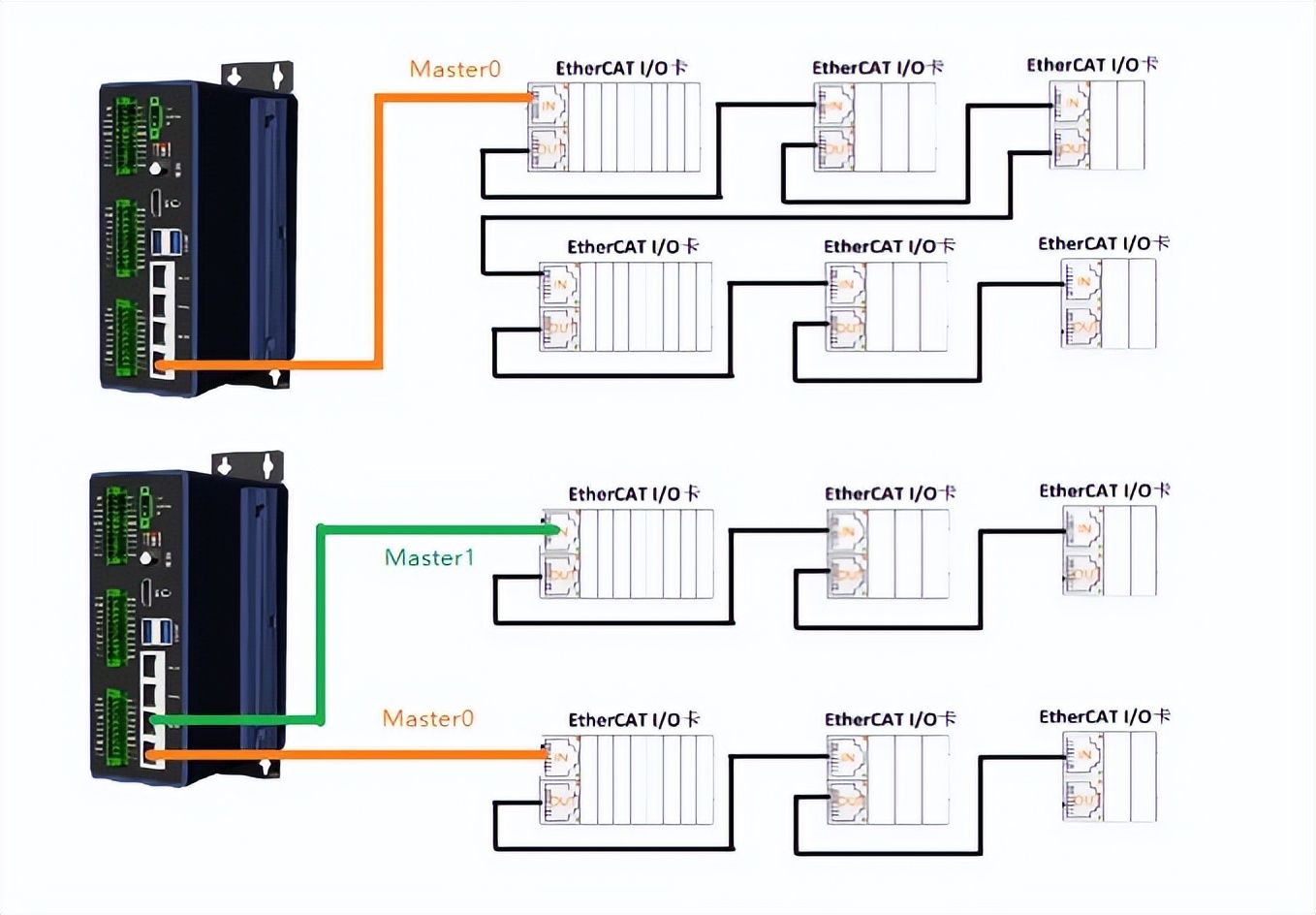
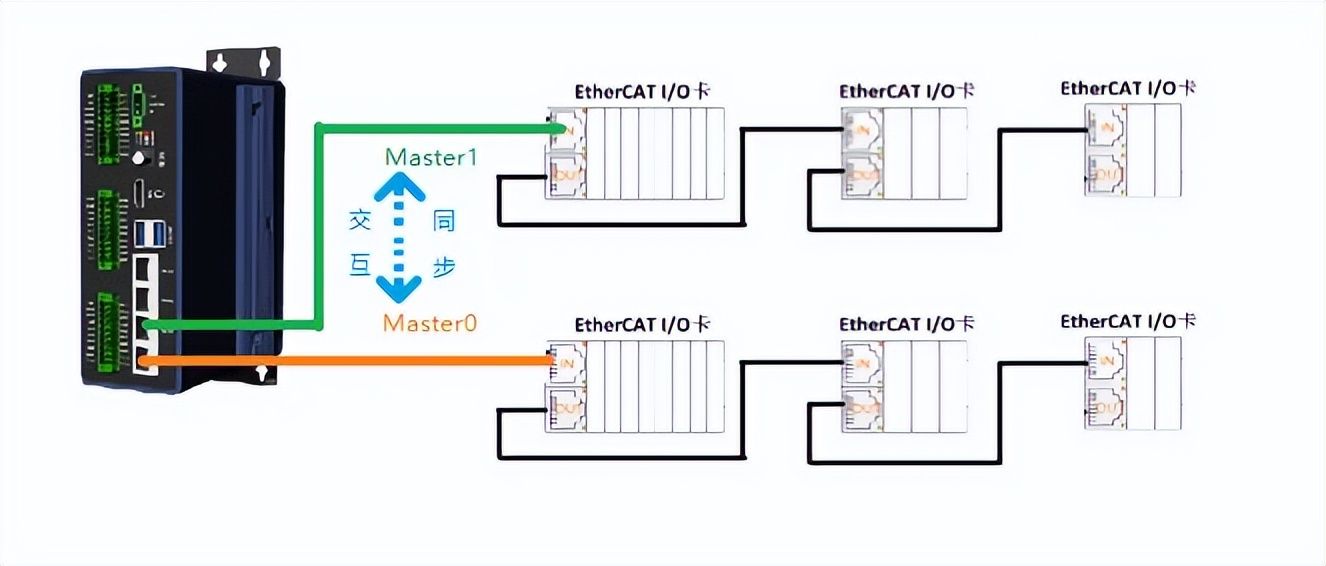
EtherCAT基于以太网技术传输、具高实时性的现场通信总线。其中,主站作为网络的核心控制器,承担着发起通信、调度数据以及管理从站的重要任务 —— 主站通过发送以太网帧遍历所有从站,利用过程数据通道传输实时控制指令,并通过邮箱通道完成参数配置与诊断。双主站架构可实现双路控制或线路冗余,让控制更加灵活,以 ZMC900E 运动控制器为例,便能直观了解工业自动化控制系统中多主站的协同控制应用。
多主站控制应用需求
EtherCAT 是基于以太网的高性能工业现场总线,支持线型、星型、环型等拓扑结构,单个网络理论最大节点数可达 65535 个。不过,随着从站设备和通信数据增多,会出现传输延迟变大、刷新周期变长等问题,影响数据实时性,设备过多也增加了维护难度,这与 CPU 主频达到一定程度后采用多核协同设计类似。
广州致远电子推出的 ZMC900E 高性能智能总线控制器,专为工厂智能化打造。它采用嵌入式 ARM 方案,集成实时操作系统与智能算法,以 EtherCAT 协议为核心,可快速构建数控智能化设备。同时,ZMC900E 支持双路主站协同控制,不仅能降低单路负载压力、保证总线实时性能,还能在一路总线异常时,确保另一路正常工作,提升系统稳定性和可靠性。
多主站软件设计
1. 主站软件框架
ZMC900E 设备采用多核异构架构,配备 5 个 A55 主处理器与 3 个 R5 协处理器,软件设计上运用多核协同处理方案。主处理器负责解析数据包等核心任务,协处理器专注于硬件消抖和数据包收发,核间通过共享内存实现高效数据交互,其架构框架如下图所示。

2. 双主站实现
ZMC900E 搭载 R5 处理器实现以太网数据收发,两路通信任务均采用实时线程与核隔离设计。核隔离技术将通信任务固定在独立 CPU 内核,避免多线程调度及跨核切换产生的微秒级时间开销,确保 EtherCAT 等工业总线数据交互的实时性。两路主站控制可在同一进程或独立进程中运行,用户可按需选择。
多主站控制使用入门
1. 双主站配置
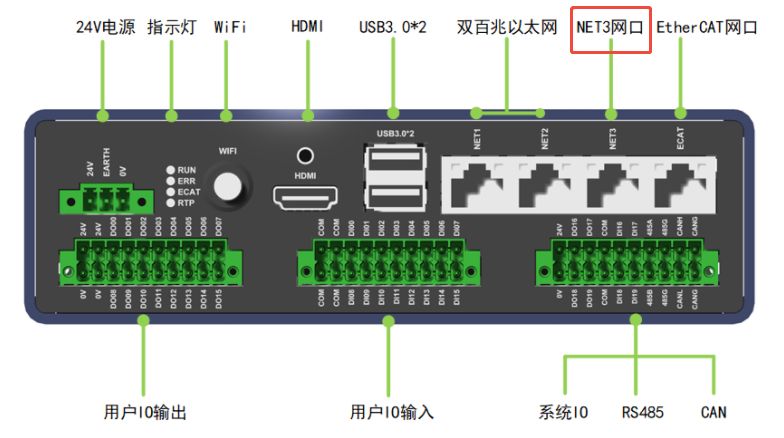
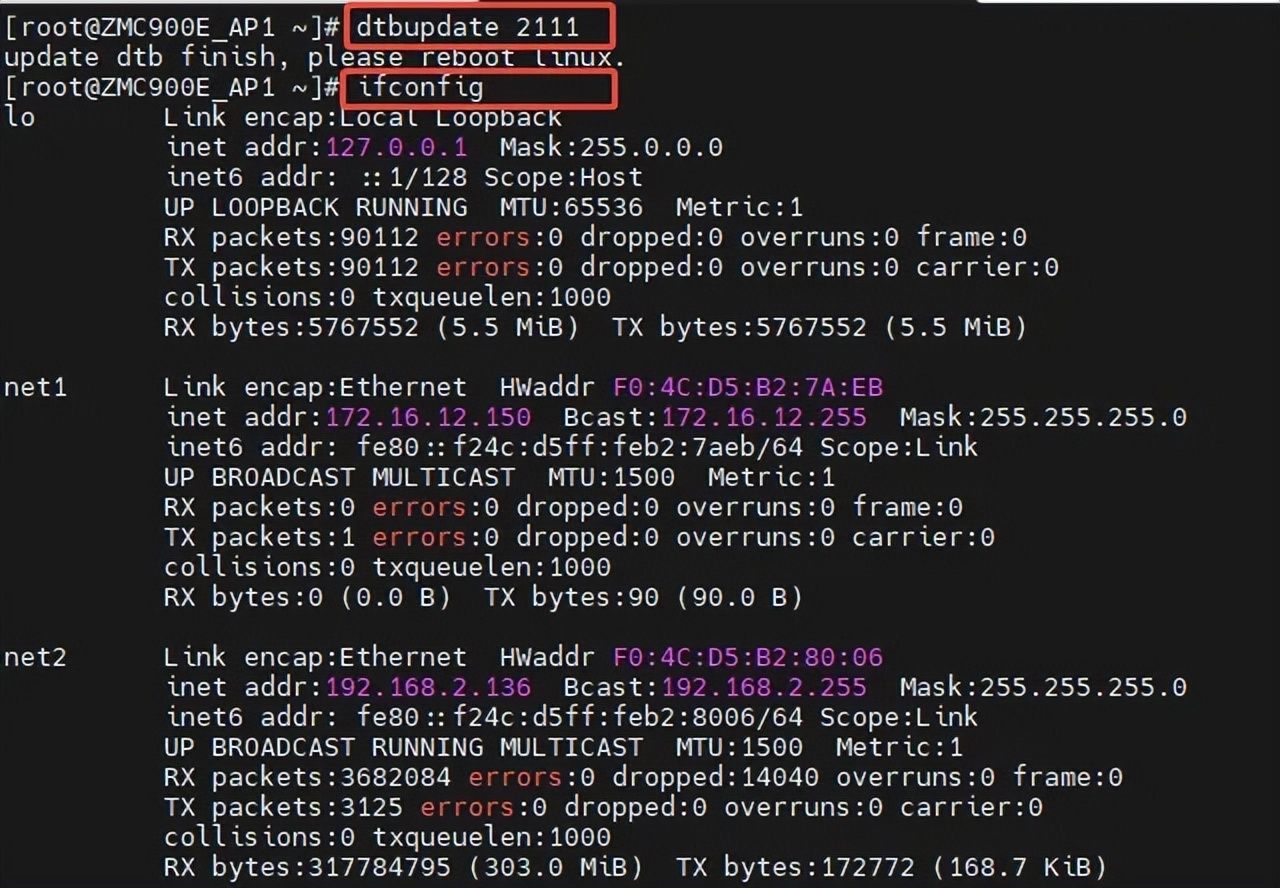
ZMC900E 的 NET3 端口作为第二主站通信口,出厂时默认为普通以太网口,需配置为 EtherCAT 通信口。操作步骤如下:首先通过 SSH 远程连接设备,进入后运行指令dtbupdate 2111,接着重启设备,重启后输入指令ifconfig,此时将无法看到 NET3 的网络配置,如下图所示。
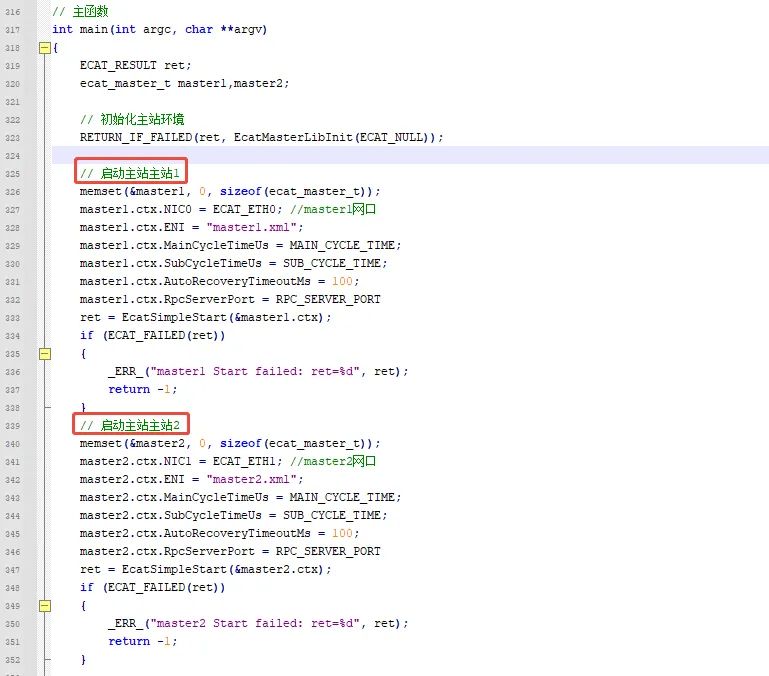
2. 双主站程序
在程序中定义主站的两个句柄 master1 和 master2,分别使用这两个句柄对主站进行配置初始化,配置内容包括网卡、通信网络从站描述文件 (ENI)、通信周期等。接着使用 EcatSimpleStart () 接口进行初始化,若没有错误信息,就表示主站启动成功,例程代码如下图所示。
多主站控制产品选型
ZMC900E集成了商业授权的EtherCAT主站解决方案,总线周期可选为250us,500us,1ms,2ms,通过EtherCAT总线可以扩展多达64个EtherCAT数字驱动轴或多个EtherCAT I/O。同时支持RS485 IO模块和EtherCAT IO模块扩展,为用户提供了多轴数、多IO点数的高性价比自动化解决方案。
ZMC900E EtherCAT主站控制器是为设备制造商提供多轴数、多IO点数控制的新一代可靠智能的运动控制解决方案,可以广泛应用于注塑行业、冲压行业、车床行业、搬运码垛、关节机器人、喷涂、玻璃机、压铸机、包装设备、3C设备、锂电池设备、纺织、流水线工作站、非标自动化装备、特种机床等高端设备应用。
产品参数表
