Linux驱动开发笔记(八)——按键输入实验
视频:第11讲 Linux按键输入试验_哔哩哔哩_bilibili
本实验是直接读取io数据。使用中断等方式进行按键输入的方式放在以后了。
1. 设备树
(详见正点原子\02、开发板原理图\02、开发板原理图\IMX6ULL_ALPHA_V2.1(底板原理图).pdf)

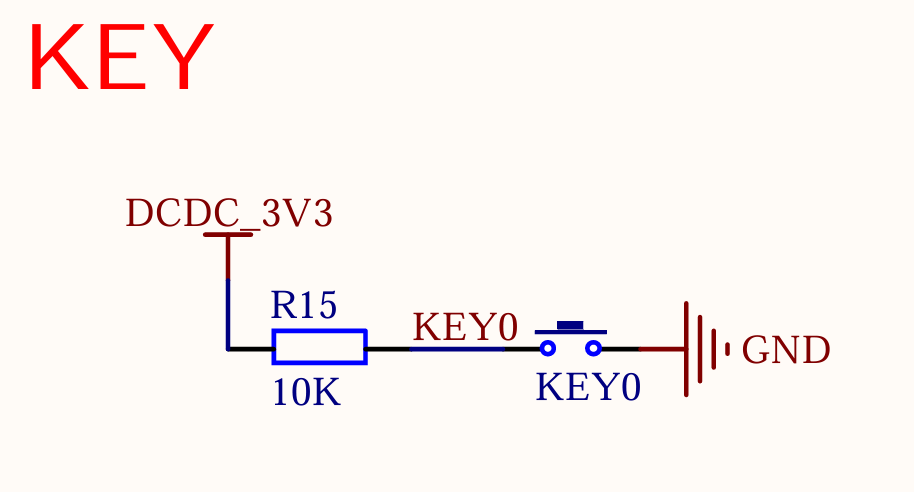
开发板上的KEY0对应UART1_CTS。且按下为低电平。
1.1 pinctrl
首先配置pinctrl。我们将其复用为一个普通的GPIO。可以在imx6ull-pinfunc.h中找到复用:
#define MX6UL_PAD_UART1_CTS_B__GPIO1_IO18 0x008C 0x0318 0x0000 0x5 0x0将UART1_CTS复用为GPIO1_IO18,并将电器属性配置为0xF080(具体可以看《IMX6ULL参考手册》):
// 写到imx6ull-alientek-emmc.dts里的&iomuxc下pinctrl_key: keygrp{fsl,pins = <MX6UL_PAD_UART1_CTS_B__GPIO1_IO18 0xF080>;};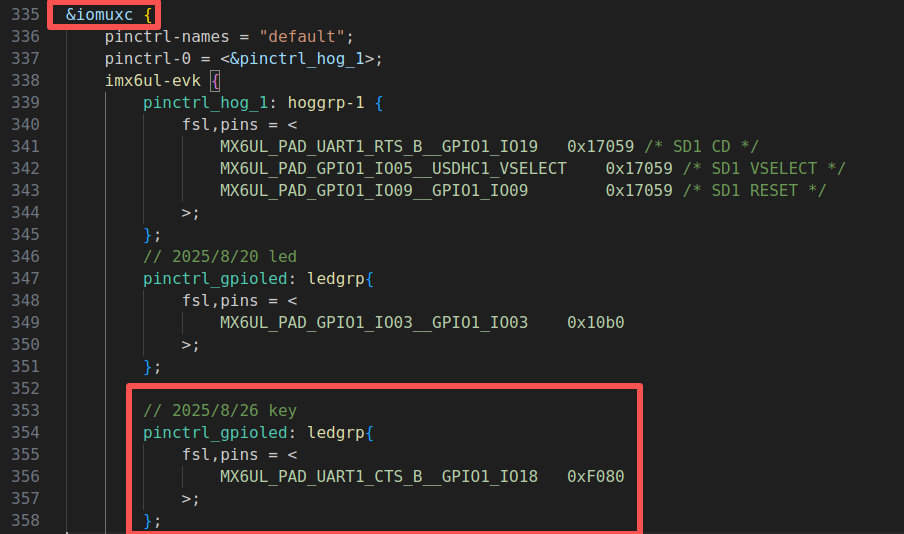
1.2 gpio
// 写到imx6ull-alientek-emmc.dts里根节点的最后key{compatible = "alientek,key";pinctrl-names = "default";pinctrl-0 = <&pinctrl_key>;key-gpios = <&gpio1 18 GPIO_ACTIVE_HIGH>; // GPIO1_pin18 高电平有效。不过作为输入这个有效电平其实没有意义status = "okay";};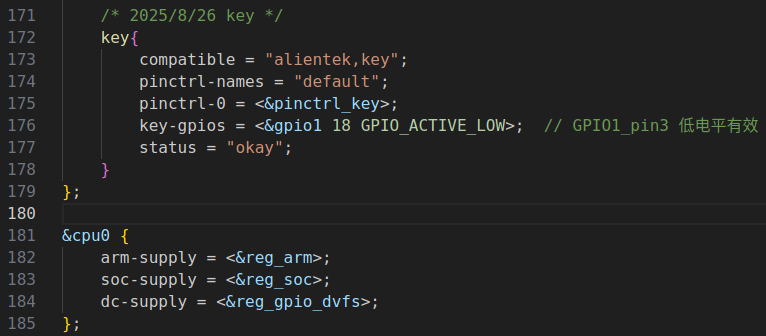
1.3 编译
# VSCODE终端
make dtbs
sudo cp arch/arm/boot/dts/imx6ull-alientek-emmc.dtb /..../tftpboot/ -f# 串口
cd proc/device-tree/
ls # 此时应当能找到key节点
2.
2.1 文件结构
10_KEY (工作区)
├── .vscode
│ ├── c_cpp_properties.json
│ └── settings.json
├── 10_key.code-workspace
├── Makefile
├── keyAPP.c
└── key.c2.2 Makefile
CFLAGS_MODULE += -w
KERNELDIR := /home/for/linux/imx6ull/linux/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek # 内核路径
# KERNELDIR改成自己的 linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek文件路径(这个文件从正点原子“01、例程源码”中直接搜,cp到虚拟机里面)CURRENT_PATH := $(shell pwd) # 当前路径
obj-m := key.o # 编译文件
build: kernel_modules # 编译模块
kernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean 2.3 key.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include <linux/cdev.h>
#include <linux/kdev_t.h>
#include <linux/stat.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/atomic.h>#define KEY_NAME "key"
#define KEY_CNT 1
#define KEY0VALUE 0XFF // 有效
#define INVAKEY 0X00 // 无效/* 设备结构体 */
struct key_dev{dev_t devid;int major;int minor;struct cdev cdev;struct device *device;struct class *class;struct device_node *nd;int key_gpio;atomic_t keyvalue;
};struct key_dev key;/* 操作集 */
static int key_release(struct inode *inode, struct file *filp){struct key_dev *dev = filp->private_data;return 0;
}
static int key_open(struct inode *inode, struct file *filp){filp->private_data = &key;return 0;
}
static ssize_t key_write(struct file *filp, const char __user *buf, size_t count, loff_t *ppos){int ret;return 0;
}
static ssize_t key_read(struct file *filp, char __user *buf, size_t count, loff_t *ppos){int value;struct key_dev *dev = filp->private_data;int ret = 0; if(gpio_get_value(dev->key_gpio) == 0){ /* 低电平->按下*/while(!gpio_get_value(dev->key_gpio)); /* 等待释放 */atomic_set(&dev->keyvalue, KEY0VALUE);} else {atomic_set(&dev->keyvalue, INVAKEY);}value = atomic_read(&dev->keyvalue);ret = copy_to_user(buf, &value, sizeof(value));return 0;}
static const struct file_operations key_fops = {.owner = THIS_MODULE,.write = key_write,.open = key_open,.release = key_release,.read = key_read,
};/* key 初始化*/
static int keyio_init(struct key_dev* dev){int ret = 0;/* 初始化 keyvalue*/atomic_set(&key.keyvalue, INVAKEY);/* 1.获取设备节点 */dev->nd = of_find_node_by_path("/key");if(dev->nd == NULL){ret = -EINVAL;goto fail_nd;}/* 2.获取LED对应的GPIO */ // 也就是节点中led-gpios那一行内容dev->key_gpio = of_get_named_gpio(dev->nd, "key-gpios", 0);if(dev->key_gpio < 0){ret = -EINVAL;goto fail_gpio;}/* 3.申请IO */ret = gpio_request(dev->key_gpio, "key0");if(ret){ret = -EBUSY;printk("IO %d has been used!\r\n",dev->key_gpio);goto fail_request;}/* 4.使用IO,设置为输入 */ret = gpio_direction_input(dev->key_gpio);if(ret < 0){ret = -EINVAL;goto fail_input;}return 0;fail_input: // 如果执行到这一步,说明已经gpio_request成功了,因此需要释放gpiogpio_free(dev->key_gpio);
fail_request:
fail_gpio:
fail_nd:return ret;
}/* 驱动入口 */
static int __init key_init(void){int ret = 0;/* 1.注册字符设备驱动 */key.devid = 0;if(key.devid){key.devid = MKDEV(key.devid, 0);register_chrdev_region(key.devid, KEY_CNT, KEY_NAME);} else {alloc_chrdev_region(&key.devid, 0, KEY_CNT, KEY_NAME);key.major = MAJOR(key.devid);key.minor = MINOR(key.devid);}/* 2.初始化cdev */key.cdev.owner = THIS_MODULE; cdev_init(&key.cdev, &key_fops);/* 3.添加cdev */cdev_add(&key.cdev, key.devid, KEY_CNT); // 错误处理先略过了/* 4.创建类 */key.class = class_create(THIS_MODULE, KEY_NAME);if(IS_ERR(key.class)){return PTR_ERR(key.class);}/* 5.创建设备 */key.device = device_create(key.class, NULL, key.devid, NULL, KEY_NAME);if(IS_ERR(key.device)){return PTR_ERR(key.device);}ret = keyio_init(&key);if(ret < 0){goto fail_device;}return 0;fail_device:class_destroy(key.class);return ret;
}/* 驱动出口 */
static void __exit key_exit(void){/* 注销字符设备驱动 */cdev_del(&key.cdev);unregister_chrdev_region(key.devid, KEY_CNT);device_destroy(key.class, key.devid);class_destroy(key.class);gpio_free(key.key_gpio);}module_init(key_init);
module_exit(key_exit);
MODULE_LICENSE("GPL");2.4 keyAPP.c
#include<stdio.h>
#include<unistd.h>
#include<sys/types.h>
#include<sys/stat.h>
#include<fcntl.h>
#include<stdlib.h>
#include<string.h>/* * @description : main主程序 * @param - argc : argv数组元素个数 * @param - argv : 具体参数 * @return : 0 成功; else失败* 调用 ./keyAPP /dev/key*/ #define KEY0VALUE 0XFF // 有效
#define INVAKEY 0X00 // 无效int main(int argc, char *argv[]){if(argc != 2){ // 判断用法是否错误printf("Error Usage!\r\n");return -1;}char *filename;int fd = 0;unsigned char databuf[1];int retvalue = 0;int cnt = 0;int value;filename = argv[1];fd = open(filename, O_RDWR); // 读写模式打开驱动文件filenameif(fd <0){printf("file %s open failed!\r\n");return -1;}while(1){read(fd, &value, sizeof(value));if(value == KEY0VALUE){printf("KEY0 Press\r\n");}}close(fd);return 0;
}2.5 测试
# VSCODE
make
arm-linux-gnueabihf-gcc keyAPP.c -o keyAPP
sudo cp keyAPP key.ko /..../nfs/rootfs/lib/modules/4.1.15/ -f# 串口
cd /lib/modules/4.1.15/
depmod
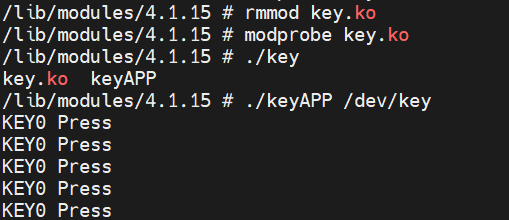
modprobe key.ko
./keyAPP /dev/key
# 此时按一次key0,输出一行"KEY0 Press"