Finite State Machine(FSM) for the Development Mode
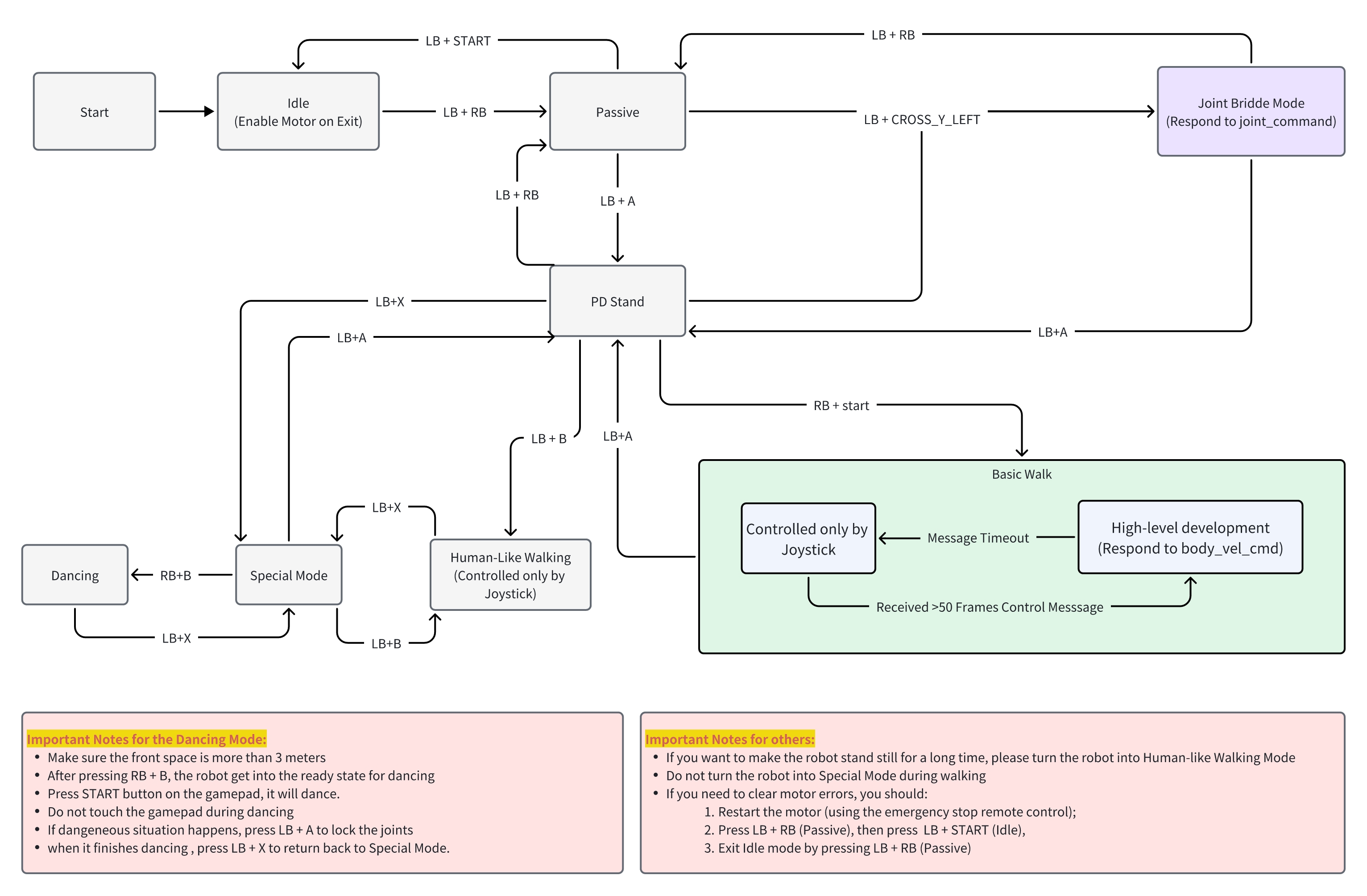
用遥控器进行不同工作模式之间的切换逻辑:
- Start:初始状态。
- Idle:空闲状态,退出该状态时启用电机。
- Passive:被动状态。
- Joint Bridge Mode:关节桥接模式,响应关节命令。
- PD Stand:PD 站立模式。
- Basic Walk:基础行走模式,包含 “仅由操纵杆控制” 和 “高级开发(响应身体速度命令)” 两个子状态,子状态间通过是否收到超过 50 帧控制消息或消息超时来切换。
- Human - Like Walking:类人行走模式,仅由操纵杆控制。
- Special Mode:特殊模式。
- Dancing:跳舞模式。
- 跳舞模式注意事项:确保前方空间超过 3 米;按下 RB + B 后机器人进入跳舞准备状态;按游戏手柄上的 START 键机器人会跳舞;跳舞时不要触碰游戏手柄;出现危险情况按 LB + A 锁定关节;跳舞结束按 LB + X 返回特殊模式。
- 其他模式注意事项:若要让机器人长时间保持静止,将其切换到类人行走模式;行走时不要切换到特殊模式;若要清除电机错误,需按步骤:用紧急停止遥控器重启电机;按 LB + RB(进入 Passive 状态),然后按 LB + START(进入 Idle 状态);按 LB + RB 退出 Idle 状态(进入 Passive 状态)。