(纯新手教学)计算机视觉(opencv)实战八——四种边缘检测详解:Sobel、Scharr、Laplacian、Canny
边缘检测详解:Sobel、Scharr、Laplacian、Canny
边缘检测是图像处理和计算机视觉中的重要步骤,主要用于发现图像中亮度变化剧烈的区域,即物体的轮廓、边界或纹理特征。OpenCV 提供了多种常用的边缘检测算子,本教程将通过四种方法带大家详细学习:Sobel、Scharr、Laplacian、Canny。
图片准备:
可直接使用下图,也可自备图片

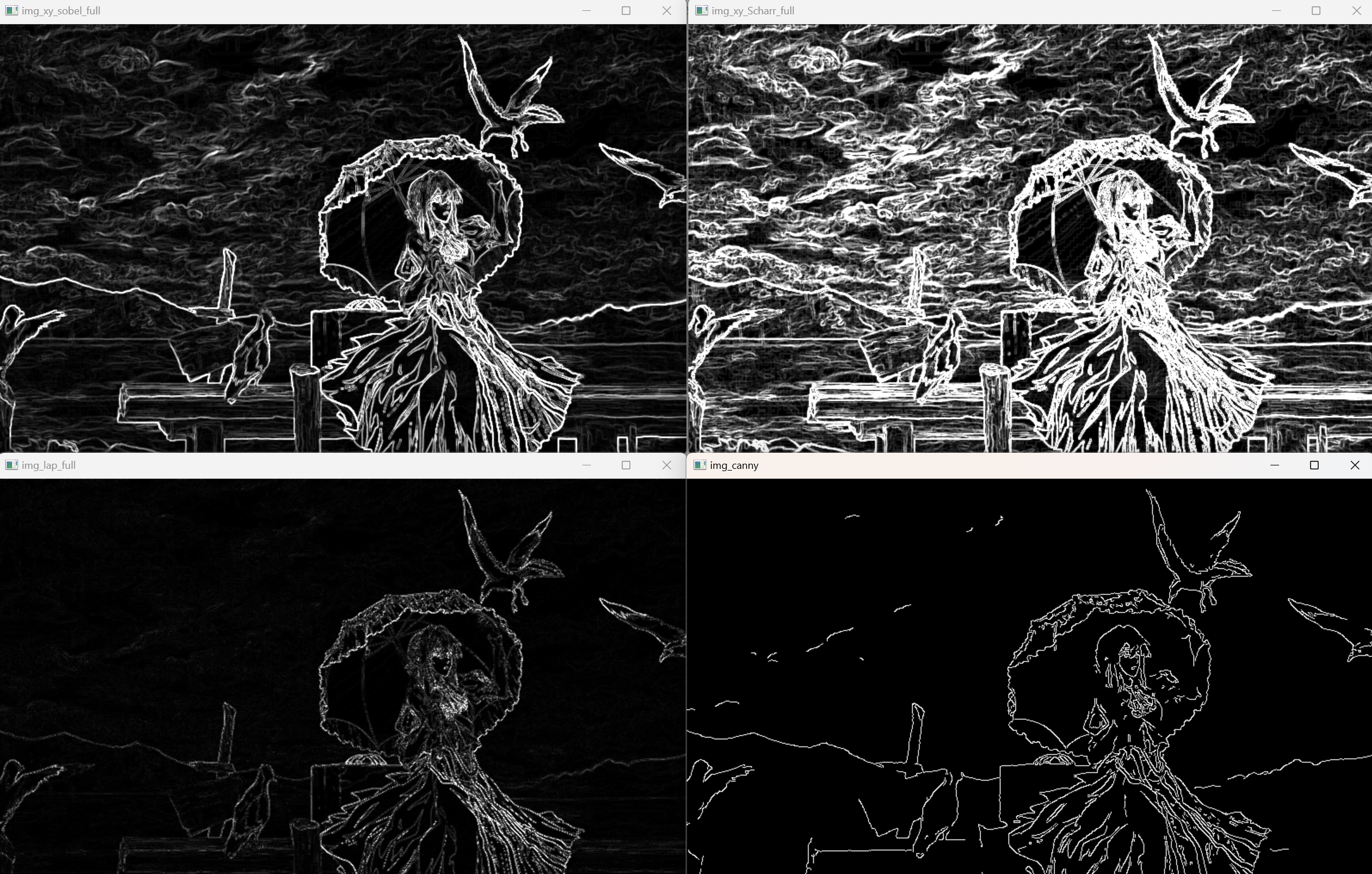
以下所有处理后的结果:
一、Sobel 算子
1. 原理
Sobel 算子本质上是 一阶导数算子,通过对图像在 x方向和y方向 上分别求导,检测像素灰度变化最明显的部分。
dx=1, dy=0:只检测水平方向(垂直边缘)。
dx=0, dy=1:只检测垂直方向(水平边缘)。
将两者结合,可以得到完整的边缘信息。
2. 函数原型
cv2.Sobel(src, ddepth, dx, dy[, ksize[, scale[, delta[, borderType]]]])
参数说明:
src:输入图像,可以是灰度图或彩色图。
ddepth:输出图像的深度,常用
cv2.CV_64F保存负数梯度信息。dx, dy:求导方向,dx=1 表示对x方向求导,dy=1 表示对y方向求导。
ksize:卷积核大小,常用3或5,必须为奇数。
| 参数 | 说明 |
|---|---|
| src | 输入图像,可以是灰度图或彩色图。 |
| ddepth | 输出图像的深度(如 cv2.CV_64F 保留负值,-1 表示与原图一致)。 |
| dx | x方向导数阶数(1 表示对x方向求导)。 |
| dy | y方向导数阶数(1 表示对y方向求导)。 |
| ksize | 卷积核大小(必须为奇数,常用 3、5、7)。 |
| scale | 缩放因子,默认 1。 |
| delta | 偏移量,默认 0。 |
| borderType | 边界模式,默认 cv2.BORDER_DEFAULT。 |
3. 示例代码
import cv2
img = cv2.imread('violet.jpg', flags=0)#不用灰度试试效果
img = cv2.resize(img,(800,500))
cv2.imshow('img',img)
cv2.waitKey(0)img_x_64 = cv2.Sobel(img,cv2.CV_64F,dx=1,dy=0)#默认int8改为float64,可保存负数
img_x_full = cv2.convertScaleAbs(img_x_64)#转换为绝对值,负数转换为正数
img_y_64 = cv2.Sobel(img,cv2.CV_64F,dx=0,dy=1)#默认int8改为float64,可保存负数
img_y_full = cv2.convertScaleAbs(img_y_64)#转换为绝对值,负数转换为正数
img_xy_sobel_full = cv2.addWeighted(img_x_full, 1, img_y_full, 1, 0)
cv2.imshow('img_xy_sobel_full',img_xy_sobel_full)
cv2.waitKey(0)4. 特点
简单高效,适合大多数情况。
容易受噪声影响。
二、Scharr 算子
1. 原理
Scharr 算子是 Sobel 算子的改进版本,当卷积核大小为 3 时,它在近似旋转对称性方面更优,因此检测效果更清晰、平滑。
2. 函数原型
cv2.Scharr(src, ddepth, dx, dy)
相比 Sobel,参数更少,专门优化了 3×3 核的情况。
| 参数 | 说明 |
|---|---|
| src | 输入图像。 |
| ddepth | 输出图像深度(如 cv2.CV_64F)。 |
| dx | x方向导数阶数(只能取1)。 |
| dy | y方向导数阶数(只能取1)。 |
| scale | 缩放因子,默认 1。 |
| delta | 偏移量,默认 0。 |
| borderType | 边界模式,默认 cv2.BORDER_DEFAULT。 |
3. 示例代码
img_x_64 = cv2.Scharr(img,cv2.CV_64F,dx=1,dy=0)#默认int8改为float64,可保存负数
img_x_full = cv2.convertScaleAbs(img_x_64)#转换为绝对值,负数转换为正数
img_y_64 = cv2.Scharr(img,cv2.CV_64F,dx=0,dy=1)#默认int8改为float64,可保存负数
img_y_full = cv2.convertScaleAbs(img_y_64)#转换为绝对值,负数转换为正数
img_xy_Scharr_full = cv2.addWeighted(img_x_full, 1, img_y_full, 1, 0)
cv2.imshow('img_xy_Scharr_full',img_xy_Scharr_full)
cv2.waitKey(0)4. 特点
对细节和纹理捕捉更好。
运算速度和 Sobel 接近,但效果更佳。
三、Laplacian 算子
1. 原理
Laplacian 算子是 二阶导数算子,通过检测像素灰度的二阶变化,直接找出边缘。
与 Sobel、Scharr 不同,它不分方向,而是直接整体检测。
2. 函数原型
cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
参数说明:
src:输入图像。
ddepth:输出图像深度。
ksize:卷积核大小(一般取1、3、5)。
| 参数 | 说明 |
|---|---|
| src | 输入图像。 |
| ddepth | 输出图像深度(如 cv2.CV_64F)。 |
| dst | 输出图像(可选,通常不写)。 |
| ksize | 卷积核大小,必须为正奇数(常用 1、3、5)。 |
| scale | 缩放因子,默认 1。 |
| delta | 偏移量,默认 0。 |
| borderType | 边界模式,默认 cv2.BORDER_DEFAULT。 |
3. 示例代码
img_lap = cv2.Laplacian(img,cv2.CV_64F)
img_lap_full = cv2.convertScaleAbs(img_lap)#转换为绝对值,负数转换为正数
cv2.imshow('img_lap_full',img_lap_full)
cv2.waitKey(0)
4. 特点
可以快速检测边缘,但更容易受噪声干扰。
常与高斯滤波结合使用(Laplacian of Gaussian, LoG)
四、Canny 算子
1. 原理
Canny 是经典的 多阶段边缘检测算法,相比前面三种更稳定、抗噪能力更强。其步骤包括:
高斯滤波去噪。
计算梯度强度与方向。
非极大值抑制(只保留局部最大边缘)。
双阈值检测(区分强边缘与弱边缘,并进行连接)。
2. 函数原型
cv2.Canny(image, threshold1, threshold2[, apertureSize[, L2gradient]])
参数说明:
image:输入图像,最好是灰度图。
threshold1:低阈值。
threshold2:高阈值。
apertureSize:Sobel 算子的核大小(默认3)。
| 参数 | 说明 |
|---|---|
| image | 输入图像(必须是单通道灰度图)。 |
| threshold1 | 低阈值,用于边缘连接。 |
| threshold2 | 高阈值,用于确定强边缘。 |
| apertureSize | Sobel 算子的卷积核大小(默认 3,可取 3、5、7)。 |
| L2gradient | 计算梯度幅值的方法,默认为 False(使用 L1 范数),若为 True 使用 L2 范数,边缘更精确但计算量更大。 |
3. 示例代码
img_canny = cv2.Canny(img, threshold1=150, threshold2=230)#低,高
cv2.imshow('img_canny',img_canny)
cv2.waitKey(0)4. 特点
效果最优,边缘清晰完整。
阈值选择影响很大。
五、效果对比总结
| 算子 | 类型 | 是否分方向 | 抗噪性 | 特点 |
|---|---|---|---|---|
| Sobel | 一阶导数 | 是 | 一般 | 快速,适合简单边缘检测 |
| Scharr | 一阶导数 | 是 | 较好 | Sobel改进,细节更清晰 |
| Laplacian | 二阶导数 | 否 | 差 | 对噪声敏感,常与滤波结合 |
| Canny | 多阶段检测 | 否 | 强 | 最优,边缘清晰完整 |
六、实践建议
快速检测:用 Sobel 或 Scharr。
细节要求高:优先 Scharr。
检测轮廓:Laplacian + 高斯滤波。
稳定性优先:Canny。
这样,一张图像可以通过这四种算子分别得到不同风格的边缘信息,从而应用在 目标检测、图像分割、OCR、医学影像分析 等场景中。