X00238-非GNSS无人机RGB图像卫星图像视觉定位python
获取方式见文末,可开发+票
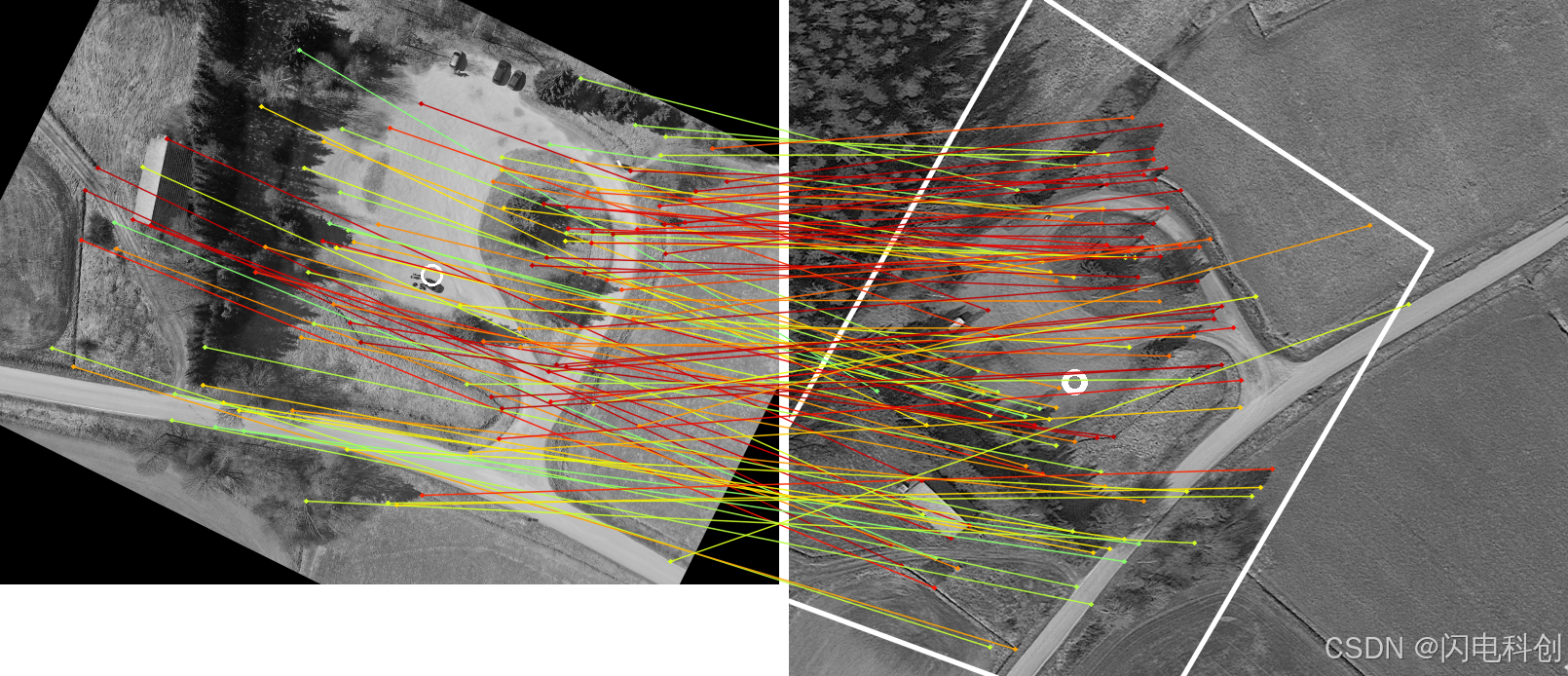
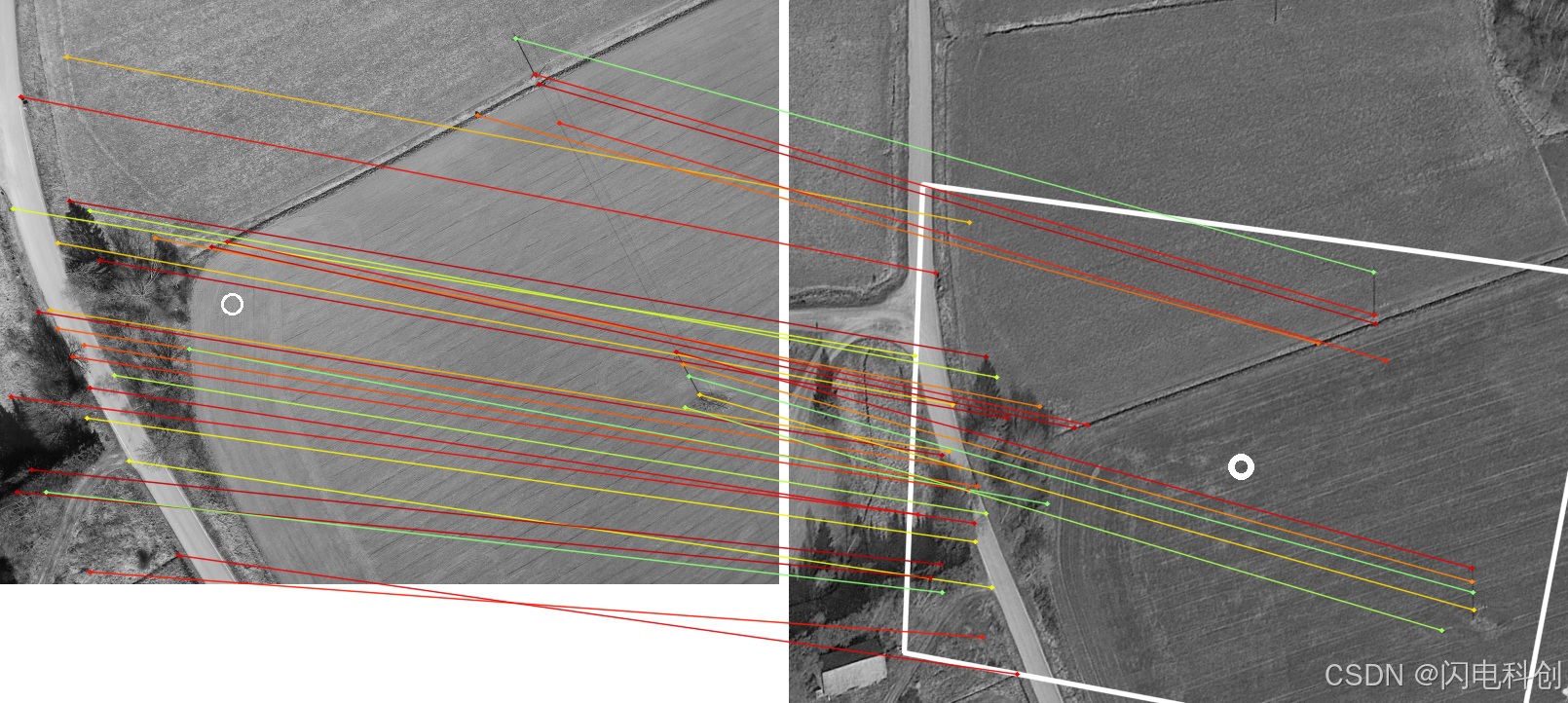
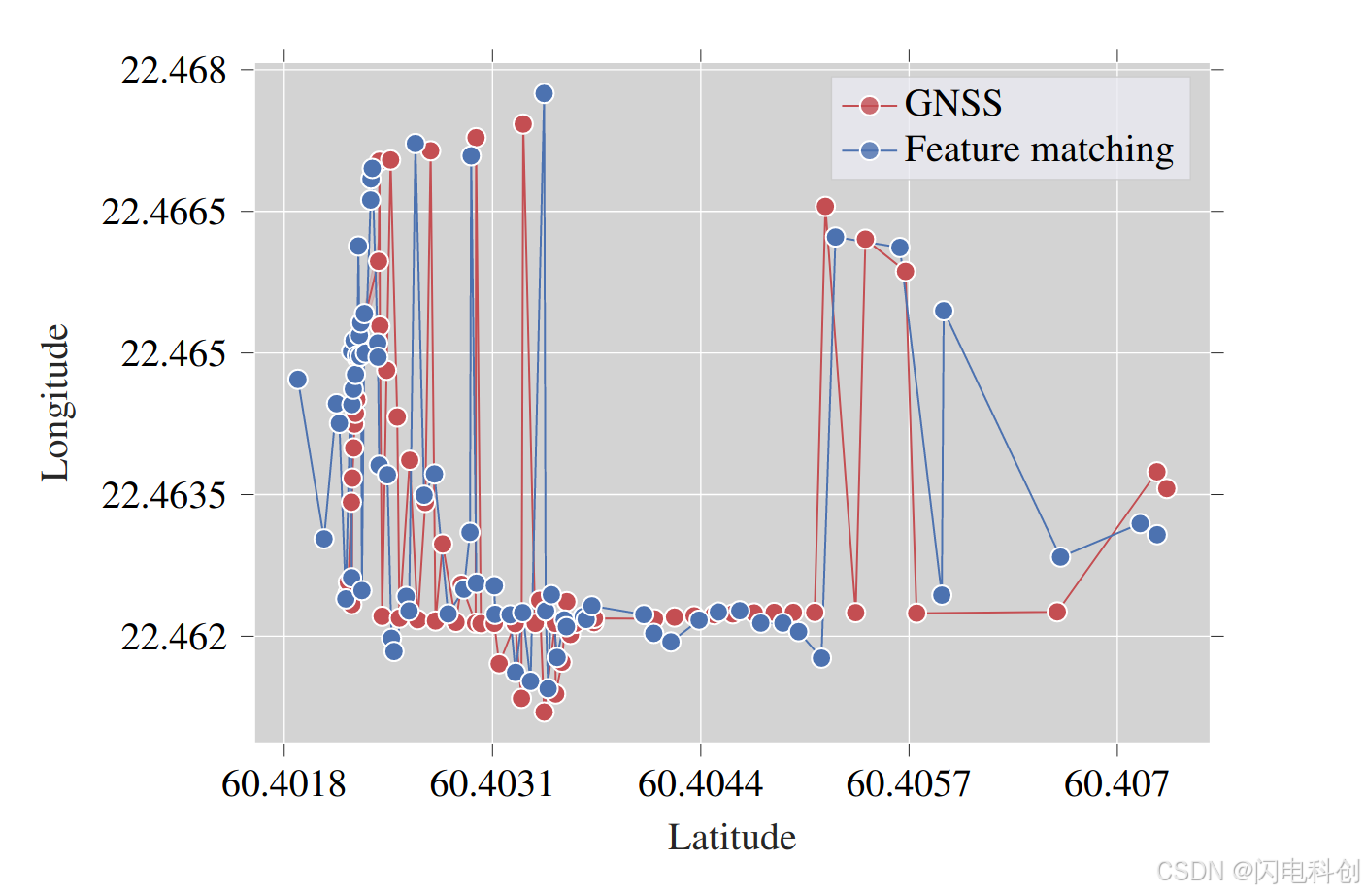
随着无人机在工业和科研领域应用的加速发展,在非城市环境中使用无gnss、基于视觉的方法进行无人机定位的需求日益增长。本文提出了一种基于视觉的定位算法,利用深度特征计算无人机在野外飞行的地理坐标。该方法基于匹配无人机相机捕获的RGB图像和由地理参考开源卫星图像组成的预构建地图的部分区域的显著特征。实验结果表明,基于视觉的定位方法具有与传统gnss定位方法相当的定位精度。与目前最先进的视觉里程计(VO)方法相比,该方法适用于长距离、高空的无人机飞行。
计算机人工智sci/ei会议/ccf/核心,擅长机器学习,深度学习,神经网络,语义分割等计算机视觉,精通大小论文润色修改,代码复现,创新点改进等等