全文 part1 - DGEMM Using Tensor Cores, and Its Accurate and Reproducible Versions
摘要
本文提出了一种在 NVIDIA 图形处理器(GPU)的张量核心(Tensor Cores,仅含 FP16、INT8 等 GEMM 计算功能)上实现 FP64(双精度,DGEMM)和 FP32(单精度,SGEMM)稠密矩阵乘法的方法。Tensor Cores 是一种特殊的处理单元,可对 FP16 输入执行内联图形矩阵乘法并以 FP32 精度运算,最终返回 FP32 精度的结果。该方法采用 Ozaki 方案 —— 一种基于无误差变换的精确矩阵乘法算法。所提方法具有三大显著优势:其一,可基于 cuBLAS 库的 cublasGemmEx 例程,借助 Tensor Cores 操作构建;其二,能实现比标准 DGEMM 更高的精度,包括正确舍入结果;其三,即便核心与线程数量不同,也能确保位级可复现性。
该方法的可达性能取决于输入矩阵各元素的绝对值范围。例如,当矩阵以动态范围为 1E+9 的随机数初始化时,在 Titan RTX GPU(Tensor Cores 算力为 130 TFlops)上,我们实现的等效 DGEMM 操作可达约 980 GFlops 的 FP64 运算性能,而 cuBLAS 库的 cublasDgemm 在 FP64 浮点单元上仅能达到 539 GFlops。研究结果表明,可利用 FP32/FP64 资源有限但低精度处理单元(如面向 AI 的处理器)运算速度快的硬件,来处理通用工作负载。
关键词:Tensor Cores ;FP16;半精度;低精度;矩阵乘法;GEMM;线性代数;精度;可复现性
1. 引言
近年来,深度学习应用的日益增多推动了特殊处理单元的发展,例如 NVIDIA GPU 上的 Tensor Cores 以及谷歌的张量处理单元(TPUs)。此类任务的核心是矩阵乘法,其并不需要 IEEE 754-2008 binary32(即单精度,FP32,含 8 位指数和 23 位尾数)和 binary64(即双精度,FP64,含 11 位指数和 52 位尾数)这样的高精度。相应地,硬件更支持快速的低精度运算,如 binary16(即半精度,FP16,含 5 位指数和 10 位尾数)以及 INT8/INT16 位整数运算。
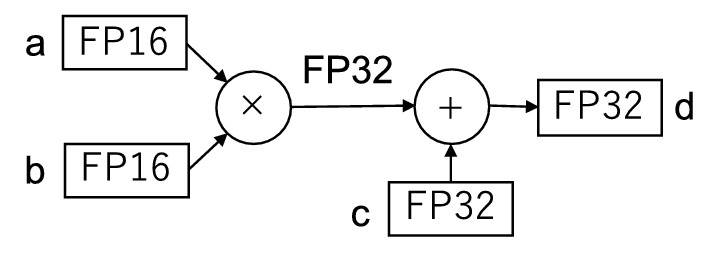
一个广为熟知的例子是 Volta 架构中引入的 Tensor Cores ,其每时钟周期可通过融合乘加操作完成一次 4x4 矩阵乘法。尽管 Tensor Cores 支持多种数据格式和计算精度,但本文聚焦于 FP32 精度模式下的 FP16 计算 —— 该模式以 FP32 精度执行 运算(图 1)。其中,
和
为 FP16 值,
和
为 FP32 值。Tensor Cores 的运算速度最高可达 CUDA 核心上标准 FP32 浮点单元(FPUs)的 8 倍。已有诸多研究在通用任务中充分利用了 Tensor Cores 的这一卓越性能。
本文提出一种在 Tensor Cores 上计算 Level-3 基本线性代数子程序(BLAS)中通用矩阵乘法例程(GEMM)的方法,可支持 FP64(DGEMM)和 FP32(SGEMM)精度。GEMM 是众多科学计算工作负载以及高性能 Linpack 测试中的核心操作之一。该方法基于 Ozaki 等人提出的一种基于无误差变换的精确矩阵乘法算法(亦称 Ozaki 方案)[13]。该方法的优势如下:
- 高效实用:基于 NVIDIA 提供的 cuBLAS 库中的 cublasGemmEx 例程构建,开发成本低;
- 精度更高:即便采用正确舍入,也能实现比标准 SGEMM 和 DGEMM 更高的精度;
- 可复现性强:对于相同输入,即便每次执行时核心与线程数量不同,也能得到相同(位级一致)的结果;
- 适应性好:其理念可适配其他精度场景。
部分研究通过利用低精度硬件来加速无需高精度的计算,而本文则尝试借助低精度硬件实现更高精度的计算。我们的 DGEMM 实现仅在 FP64 支持有限的处理器上性能优于 cuBLAS 的 DGEMM。但相比之下,比 FP64 浮点单元的性能提升并非关键,更重要的是旨在提升低精度硬件(如面向人工智能的处理器)的潜力。此外,该方法为兼顾 AI 与传统高性能计算(HPC)工作负载的高效硬件设计提供了新视角。例如,可减少 FP64 资源数量,转而提供大规模低精度支持。
本文其余部分结构如下:第 2 节介绍相关工作;第 3 节阐述基于 Ozaki 方案的方法;第 4 节介绍该方法的实现;第 5 节在 Titan RTX 和 Tesla V100 GPU 上进行精度与性能评估;第 6 节探讨基于该方法的未来硬件设计方向;第 7 节总结全文。
2. 相关工作
已有多项研究尝试将为 AI 工作负载设计的低精度硬件用于其他场景。例如,Haidar 等人 [7] 在稠密与稀疏线性系统中,结合迭代精化技术利用了标准 FP16 和 FP32 精度模式下的张量核心操作。还有研究针对能效提升展开探讨 [6],Carson 与 Higham 则对此进行了误差分析 [1]。Yang 等人 [16] 在谷歌 TPUs 上采用 bfloat16(BF16,含 8 位指数和 7 位尾数)实现了伊辛模型的蒙特卡洛模拟。这些研究将低精度运算应用于代码中无需高精度的部分 —— 此类部分可在该精度水平下完成计算,因此其适用性取决于具体算法或问题。
与本文类似,部分研究尝试借助低精度硬件实现比硬件原生精度更高的运算。例如,Markidis 等人 [11] 提出了一种提升张量核心矩阵乘法计算精度的方法。尽管其方法在概念上与本文相似,但仅能对 FP16 支持的动态范围内的矩阵进行计算,且精度与 SGEMM 相当。Henry 等人 [8] 探讨了在 BF16 浮点单元上采用双双精度算术 [2](一种经典的二重精度算术技术)执行高精度运算的性能。Sorna 等人 [15] 提出了一种提升张量核心上二维快速傅里叶变换精度的方法。需注意的是,这些研究中,获得超过 FP32 或 FP64 浮点单元的性能并非关键,重点同样在于提升低精度硬件的潜力。因此,可能需要重新设计硬件,以平衡浮点单元所支持的精度。本文的探讨方向与之相近。
本文所提方法的核心 ——Ozaki 方案,最初是为通过标准浮点运算实现精确矩阵乘法而提出的。OzBLAS [12] 基于 Ozaki 方案在 CPU 和 GPU 上实现了精确且可复现的 BLAS 例程。OzBLAS 基于 FP64 浮点单元上的 DGEMM 构建【注,结果的精度高于原始的 FP64 gemm】,而本文中的 Ozaki 方案则借助 Tensor Cores 上的 GEMM 执行 DGEMM/SGEMM 操作。Ichimura 等人 [10] 还报道了在多核 CPU 上基于 FP64 运算的 Ozaki 方案高性能实现。
3. 方法
本节首先介绍通过改进的 Ozaki 方案在 Tensor Cores 上计算 DGEMM 的基本方案,随后介绍用于提升计算速度的附加技术。本文中, 和
分别表示 FP64 和 FP32 算术下的计算;
和
分别表示 FP64(
)和 FP32(
)的单位舍入误差【注, 单位舍入误差解释】;
和
分别表示 FP64 和 FP16 浮点数的集合;
表示包含零的自然数集合。
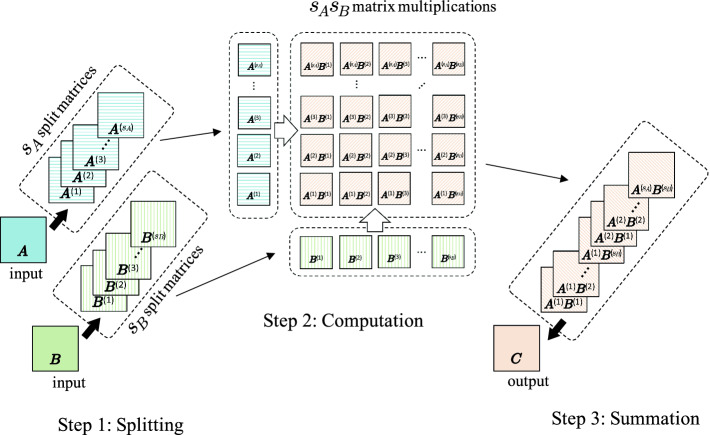
Fig. 2. Schematic of matrix multiplication () by Ozaki scheme (in this figure, scaling is omitted).
3.1 适用于张量核心的 Ozaki 方案
Ozaki 方案对矩阵乘法进行无误差变换,具体而言,将矩阵乘法转化为多个矩阵乘法的求和 —— 这些矩阵乘法可通过浮点运算执行且无舍入误差。图 2 为整个 Ozaki 方案的示意图,该方法包含三个主要步骤:
- 拆分:对输入矩阵按元素拆分得到多个子矩阵;
- 计算:计算所有子矩阵间的两两矩阵乘积;
- 求和:对上述 所有子矩阵间的两两矩阵乘积 按元素求和。
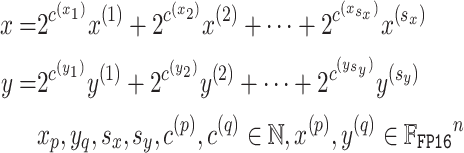
下面详细描述各步骤。为简洁起见,我们以两个向量 的内积为例进行说明,但该方法可自然扩展到矩阵乘法(矩阵乘法本质上由多个内积构成)。此外,尽管此处仅描述 DGEMM 的情况,但其理念同样适用于 SGEMM。
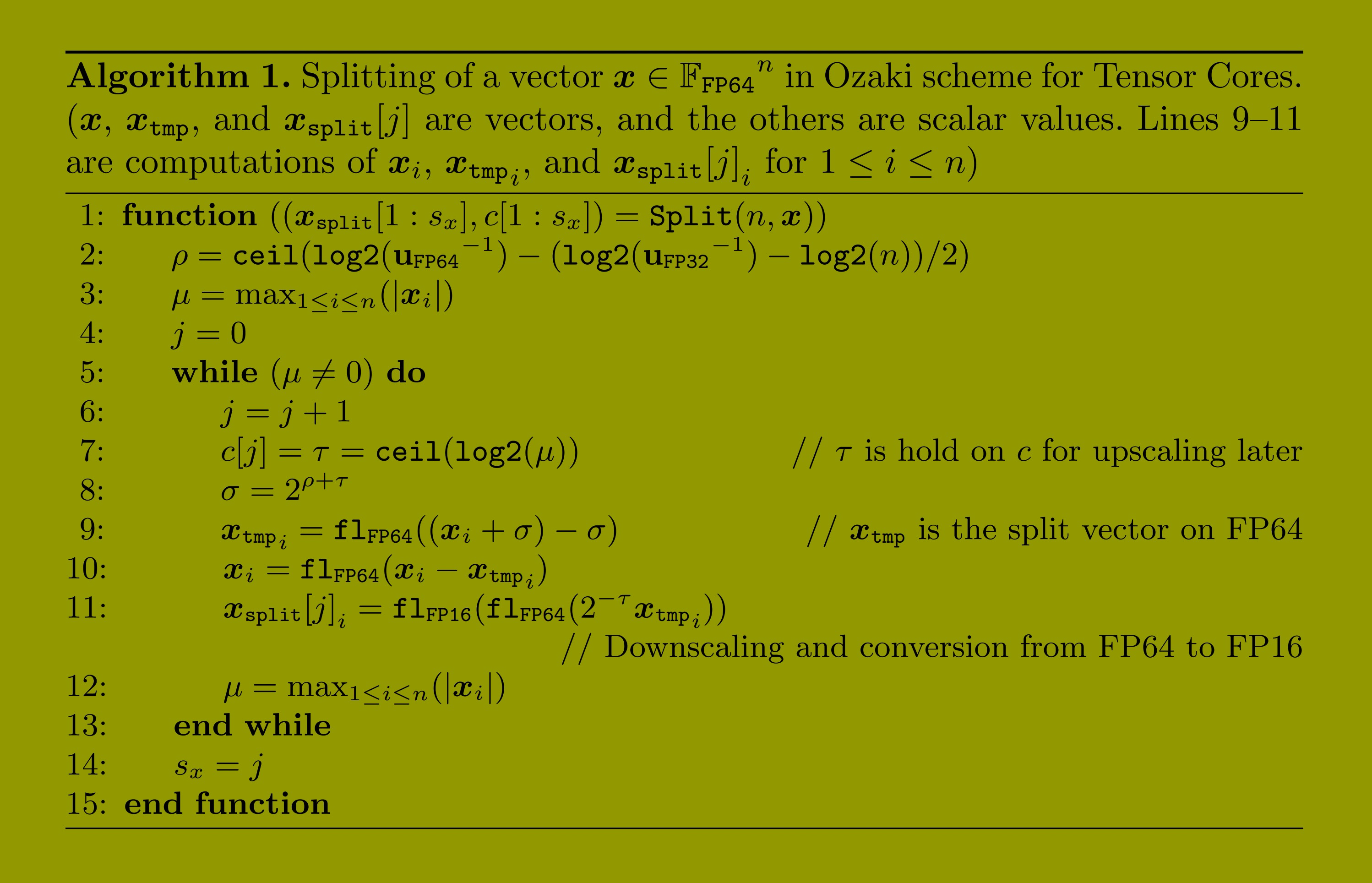
步骤 1:拆分。算法 1 将 FP64 输入向量拆分为多个 FP16 向量,过程如下:
首先得到 FP64 格式的子向量,再将其转换(降尺度)为 FP16 格式。该转换仅调整指数,不会导致有效数字的 bit 丢失。其中, 和
分别为向量
和
的指数从 FP64 到 FP16 的缩小因子。在算法 1 的第 7 行中,当
时,
达到 1024,这意味着
和
可存储为 2 字节 short 类型的整数。拆分算法需满足以下特性:
1. 若 和
为非零元素,则
![]()
2. 在 FP32 计算中必须无误差:
![]()
拆分可理解为从浮点表示到定点表示的转换。上述第一个特性意味着,通过省略最低阶的部分子向量,可控制最终结果的精度(降低精度)。在一定数量的子向量下可获得的最终结果精度,取决于内积的长度以及输入向量各元素的绝对值范围。需注意的是,若要将 Tensor Cores 替换为其他精度的浮点单元,需修改算法 1 中的参数 ,且被分割的向量(
和
)的 bit 数取决于浮点单元的精度。
步骤 2:计算。接下来,内积 按如下方式计算:
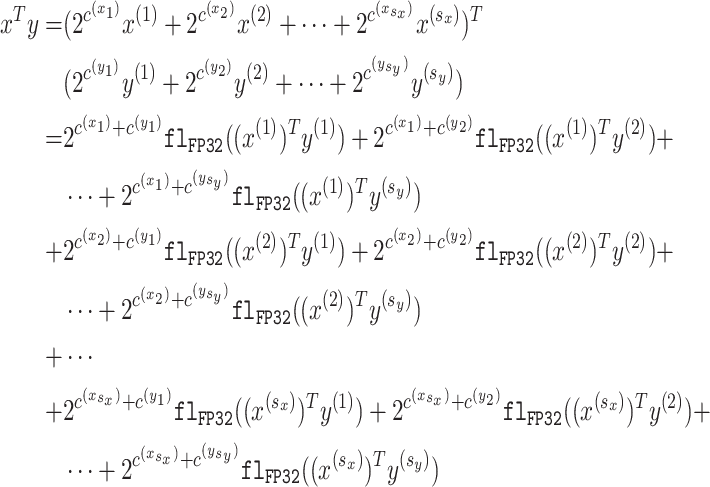
此处需计算子向量间所有两两内积,共需计算 个内积。
为放大因子,用于补偿拆分过程中的缩小操作。根据算法 1 的第二个特性,由于输入为 FP16 格式,子向量的内积可通过 Tensor Core 操作计算。将该示例扩展到矩阵乘法时,必须基于标准内积算法对子矩阵进行乘法 —— 不允许采用 Strassen 算法等分治方法。
步骤 3:求和。最后,对子向量的内积进行求和。若所需精度为标准 DGEMM 的精度,求和可通过 FP64 算术完成。但由于步骤 2 中的 无舍入误差(无误差),通过例如 NearSum [14] 等正确舍入方法进行求和,可得到
的正确舍入结果。即便在 FP64 算术中,若采用可复现的求和方法,结果也具有可复现性。由于求和是按元素进行的,计算顺序易于固定。
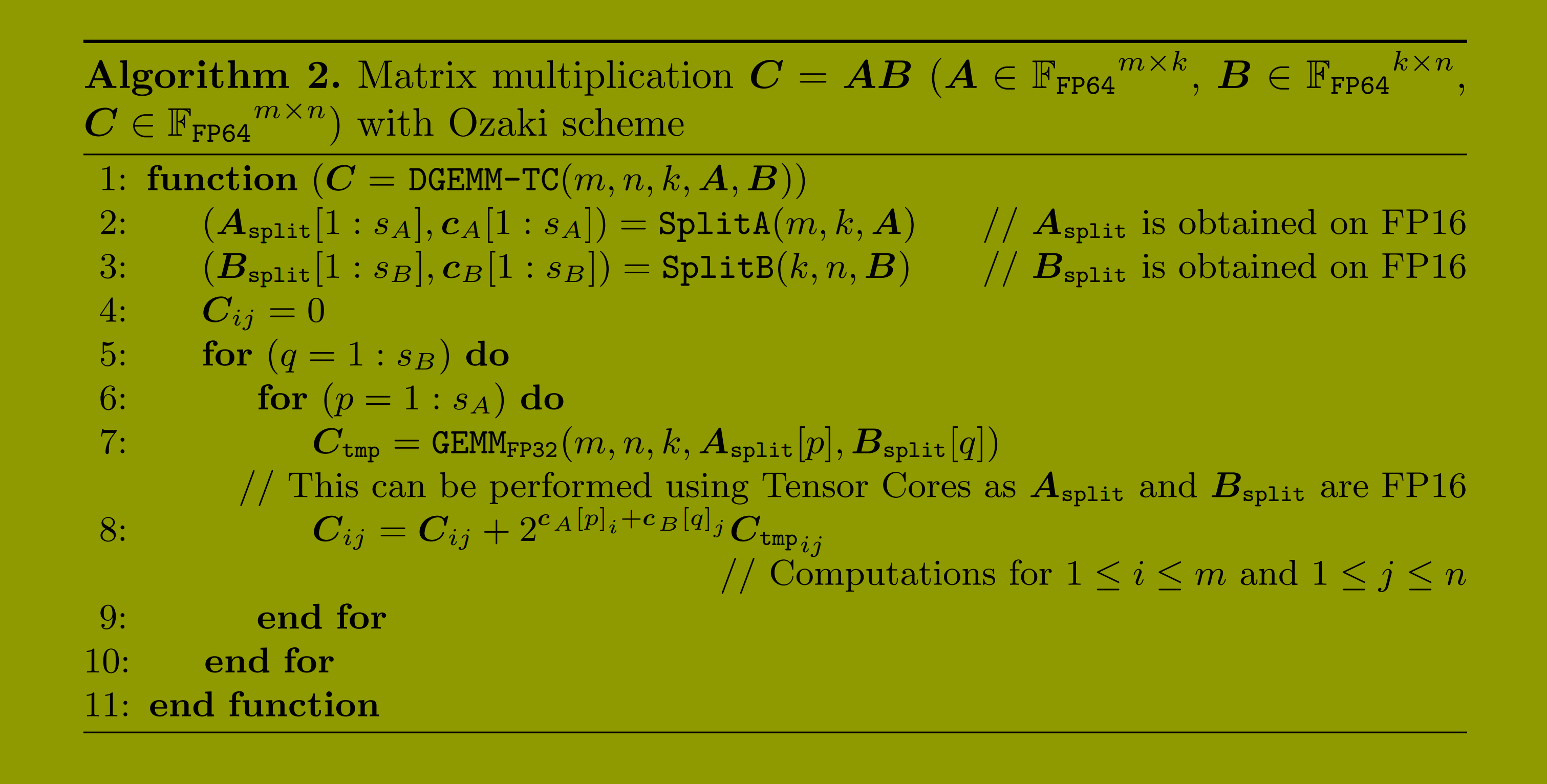
矩阵乘法的完整流程。算法 2 在 Tensor Cores 上实现了矩阵乘法的完整 Ozaki 方案。其中,SplitA 和 SplitB 分别沿矩阵 和
的内积方向(k 维),采用算法 1 进行拆分。需注意的是,由于
和
可存储为 FP16 格式,
可通过 cuBLAS 库的 cublasGemmEx 例程,在 Tensor Core 上以 FP32 精度执行 FP16 计算。
3.2 快速计算技术
为进一步提升性能,可通过以下方法修改算法 1 或算法 2。第 4 节将讨论不改变算法的基于实现的加速技术。
快速模式。与 OzBLAS 的实现类似,我们定义参数 来确定计算中子矩阵的数量。指定后,可通过省略
中
的计算来减少计算量,但会导致精度略有损失。若所需精度为 FP64(与标准 DGEMM 相当,通过下述确定子矩阵数量的方法实现),则精度损失可忽略不计。该技术最多可将矩阵乘法的数量从
减少到
。
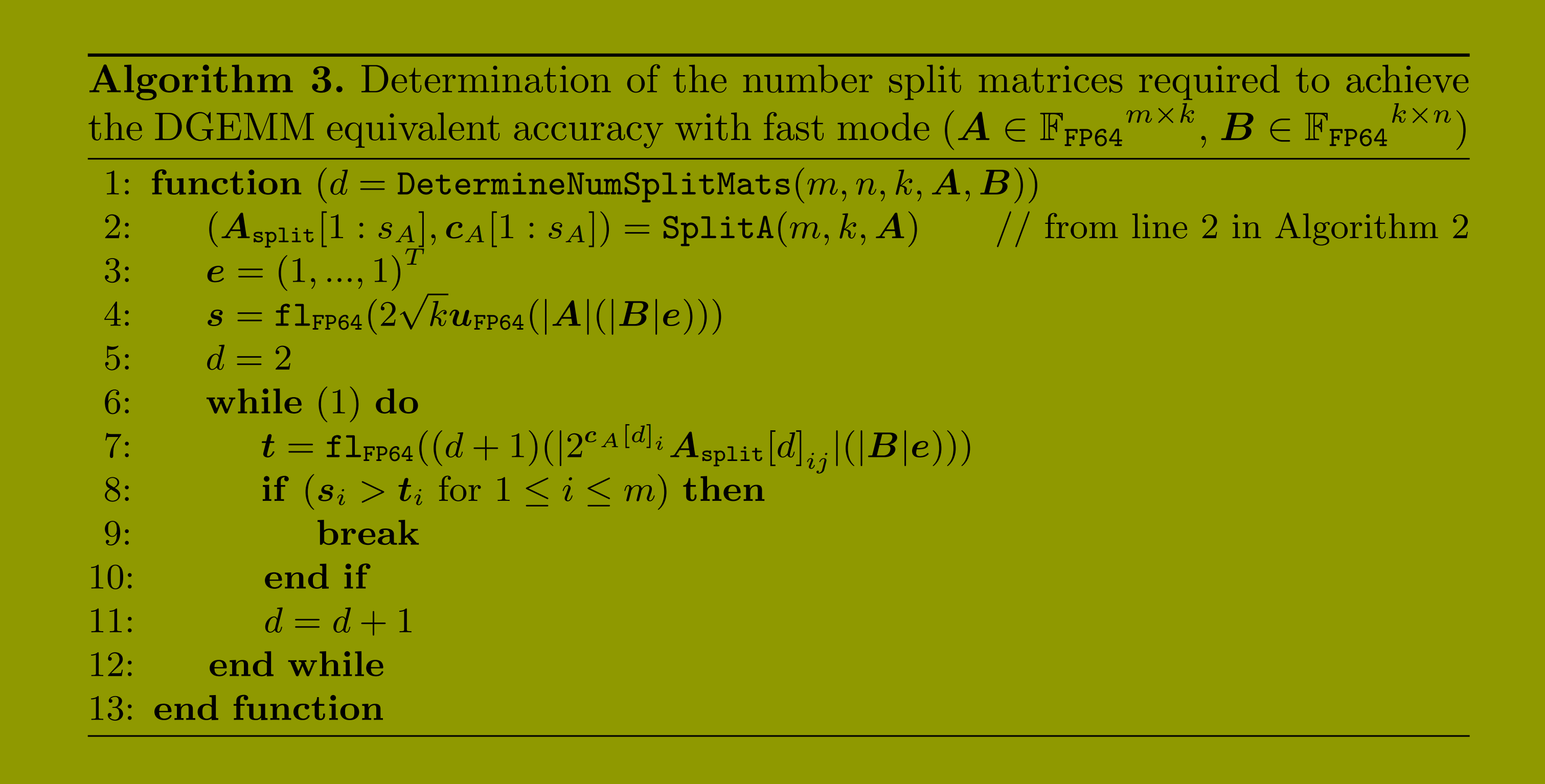
估算实现 FP64 等效精度所需的子矩阵数量。算法 1 在 时会自动停止拆分,即此时最终结果的精度达到最大。但如果所需精度为 FP64 算术下标准 DGEMM 的精度(FP64 等效精度),可基于概率误差界 [9] 通过算法 3 估算所需的最小拆分次数:
![]()
其中, 的引入是为了避免在估算中进行矩阵乘法(需注意,在算法 3 的第 7 行中
,为第 d 个未缩小的 FP64 子矩阵。因此,第 2 行的 SplitA到
无需执行到,且可将 SplitA 与该算法集成)。该算法设计用于快速模式。若拆分次数按算法 1 执行到的方式确定,精度可能低于标准 DGEMM。此时,必须禁用快速模式。需注意的是,由于子矩阵数量仅基于概率误差界估算,且会受向量
影响,该方法中期望精度(标准 DGEMM 所达精度)与实际获得精度之间可能存在一定差异。
内积分块。本研究暂未实现此步骤。由于算法 1 中的 包含内积维度
,实现一定精度所需的拆分次数取决于矩阵的内积维度。通过对内积操作采用分块策略,可避免拆分次数的增加。分块大小可设置为实现最佳性能的最小尺寸。但该策略会增加求和成本,且除非执行正确舍入计算,否则改变分块大小可能会影响可复现性。