强化学习-CH3 最优状态值和贝尔曼最优方程
强化学习-CH3 最优状态值和贝尔曼最优方程
3.1 最优状态值(state values)和最优策略(policies)
定义:(根据状态值去定义)对于每一个状态都有最大的状态值

3.2 贝尔曼最优方程(BOE)
对于每一个状态s,它的贝尔曼最优方程的表达形式为:(π(s)表示状态s的一个策略)
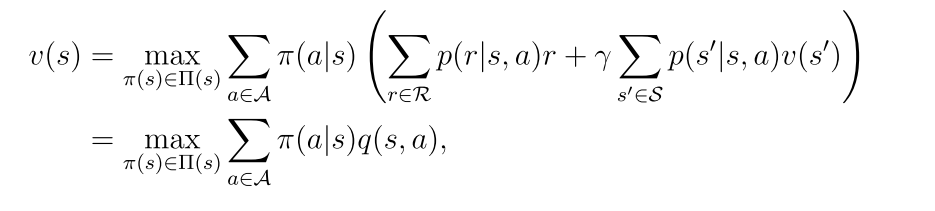

3.2.1 最大化BOE的右边
如何求解:(有两个未知值,一个是v(s),一个是π(a|s))
因为

当
其中
最优策略π(s)是选择q(s, a)值最大的策略。
3.2.2 BOE的向量形式

3.2.3 不动点定理
不动点:x1 = f(x1) x1既是不动点
收缩映射(contraction mapping):存在γ∈(0,1),使得

定理(收缩映射):对任意等式x=f(x),其中x和f(x)都是实向量,如果f是一个收缩映射,那么以下结论成立:
(1)一定存在一个不动点
(2)不动点是唯一的
(3)迭代算法

由此可以看到,BOE也符合收缩映射定理
3.3 从BOE中求解最优策略
(1)求解v*
迭代法:

(2)求解π*



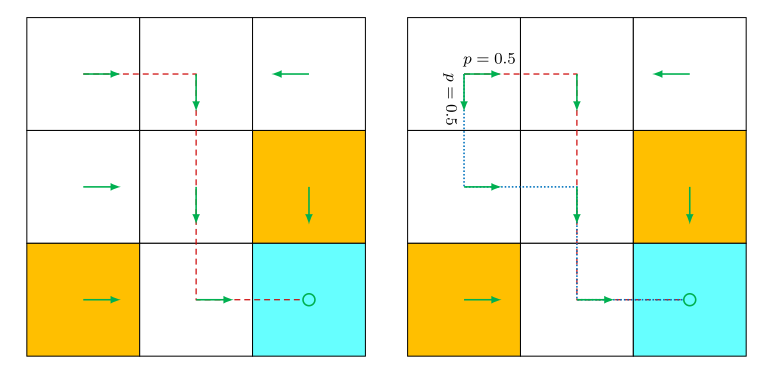
对于最优状态值它是唯一的,而对于最优策略不是唯一的,且一定存在一个确定性的最优策略(可能存在不确定的最优策略)
总结:对于贝尔曼方程,列出了状态值之间的关系,可以通过迭代法进行求解,从状态值又引出了动作值
对于BOE,它是一种特殊的贝尔曼方程,在原先的基础上求解最优的状态值和策略。根据收缩映射定理,也是通过迭代法求解最优状态值,进而获取动作值,由贪心算法,对于每个状态的策略选取动作值最大的动作,执行概率为1.
3.4 影响最优策略的因素

(1)折扣率:γ的大小决定重视立即奖励还是未来奖励
(2)奖励:决定机器人是否进入到惩罚区域
[外链图片转存中…(img-95Ln67Ew-1755593443296)]
(1)折扣率:γ的大小决定重视立即奖励还是未来奖励
(2)奖励:决定机器人是否进入到惩罚区域
如果扩大所有奖励或给所有奖励增加相同的值,最优策略保持不变。