差速转向机器人研发:创新驱动的未来移动技术探索
在科技日新月异的今天,机器人技术作为智能制造与自动化领域的核心驱动力,正以前所未有的速度发展。其中,差速转向机器人以其独特的运动机制和广泛的应用前景,成为了科研与工业界关注的焦点。本文旨在探讨差速转向机器人研发进展,揭示其背后的技术原理及对未来社会的影响。
差速转向原理:灵活与效率的完美结合
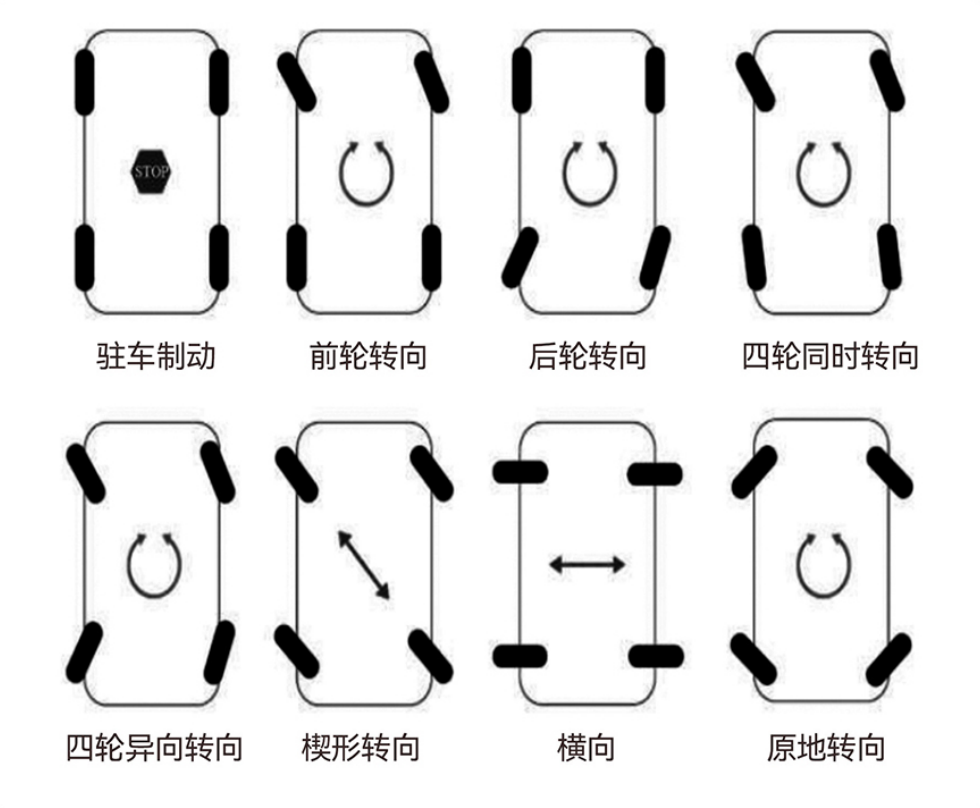
差速转向,顾名思义,是通过调整机器人两侧轮子或履带的速度差来实现转向的一种技术。与传统转向方式相比,差速转向无需复杂的机械结构或额外的转向装置,大大简化了设计,提高了系统的可靠性和灵活性。在机器人行驶过程中,通过精确控制两侧驱动单元的速度差,可以实现从直线行驶到平滑转向的无缝切换,甚至完成原地旋转等高难度动作,为机器人在复杂环境下的作业提供了强有力的支持。
研发挑战与技术创新
差速转向机器人研发并非易事,面临着控制算法优化、动力分配策略、材料耐用性提升等多重挑战。为了克服这些难题,研发团队不断探索新技术、新材料的应用,如采用先进的传感器融合技术提升环境感知能力,利用深度学习算法优化路径规划与运动控制策略,以及研发高强度、轻量化的复合材料以增强机器人的耐用性和适应性。
应用前景广阔
差速转向机器人的独特优势使其在众多领域展现出巨大的应用潜力。在工业自动化领域,它们可以替代人工完成繁重、危险的作业任务,如物料搬运、生产线巡检等;在农业领域,通过搭载不同的农具,它们能够实现精准播种、施肥、除草等作业,提高农业生产效率;此外,在医疗、救援、探索等领域,差速转向机器人同样能够发挥重要作用,为人类社会带来前所未有的便利与安全保障。
差速转向机器人的研发,不仅是机器人技术的一次重要突破,更是人类探索未知、追求更高效生产方式的重要尝试。随着技术的不断进步和应用场景的不断拓展,我们有理由相信,差速转向机器人将在未来社会中扮演更加重要的角色,为推动社会进步和经济发展贡献自己的力量。