【机器人-基础知识】ROS2常用命令
1. 创建工程
ros2_ws/ # 工作空间根目录
├── src/ # 源代码目录,放置 package 源码
│ ├── package_1/ # 第一个 ROS 2 包(可以是节点、库等)
│ │ ├── package.xml # 包描述文件
│ │ ├── CMakeLists.txt # 构建配置(C++ 或 Python)
│ │ └── ... # 节点源代码或 Python 模块等
│ └── package_2/ # 第二个 ROS 2 包
│ ├── package.xml
│ ├── CMakeLists.txt
│ └── ...
├── install/ # 编译安装输出(由 colcon build 生成)
├── build/ # 构建中间文件(由 colcon build 生成)
└── log/ # 构建和运行日志(由 colcon build 生成)1.1. 创建ROS2包
# 在src目录下执行
ros2 pkg create --build-type ament_cmake my_package --dependencies rclcpp std_msgs
| 参数/选项 | 说明 | 示例 |
|---|---|---|
--build-type | 指定包的构建类型,常用值有 ament_cmake、ament_python 等 | --build-type ament_cmake |
--dependencies | 指定该包依赖的 ROS 2 包,多个包用空格分隔 | --dependencies rclcpp std_msgs |
- 执行后示例:
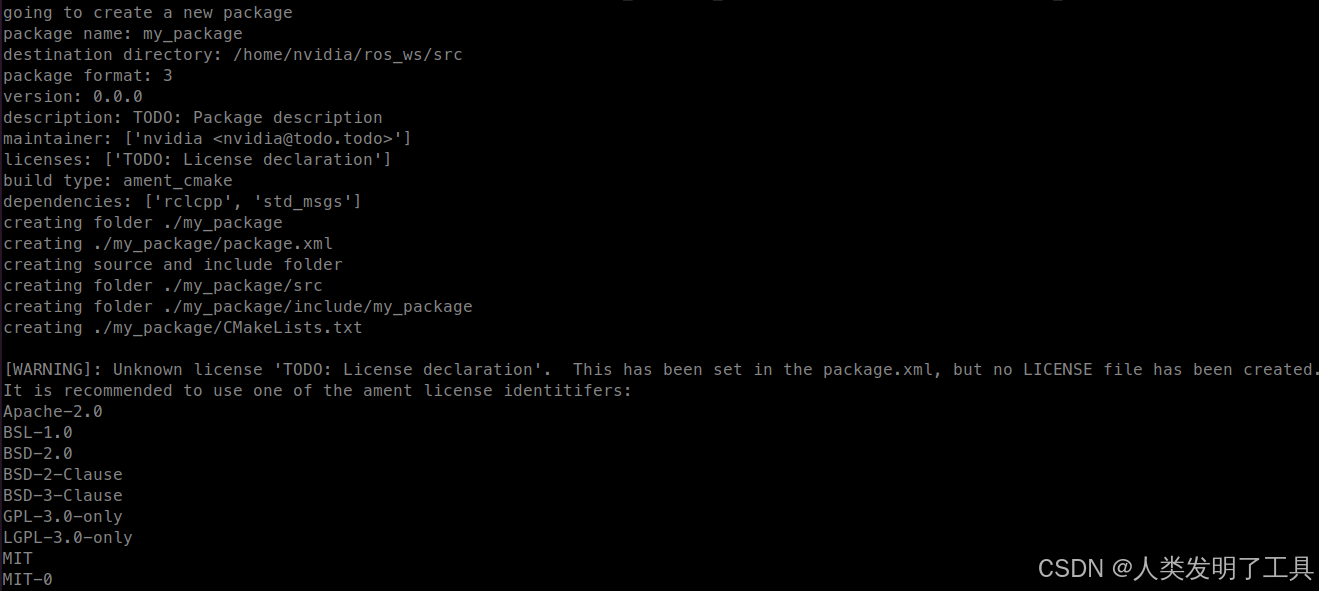
- 执行后多出文件夹:
my_package/
├── CMakeLists.txt # 构建脚本(CMake)
├── package.xml # 包元信息(名称、版本、依赖等)
├── src/ # 源码目录(需手动创建或添加)
│ └── my_node.cpp # 你可以在这里写节点代码
├── include/my_package/ # 头文件目录(可选)
└── launch/ # 可选:存放 launch 文件
- 自动创建的package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>my_package</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="nvidia@todo.todo">nvidia</maintainer><license>TODO: License declaration</license><buildtool_depend>ament_cmake</buildtool_depend><depend>rclcpp</depend><depend>std_msgs</depend><test_depend>ament_lint_auto</test_depend><test_depend>ament_lint_common</test_depend><export><build_type>ament_cmake</build_type></export>
</package>
- 自动创建的CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(my_package)if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)# the following line skips the linter which checks for copyrights# comment the line when a copyright and license is added to all source filesset(ament_cmake_copyright_FOUND TRUE)# the following line skips cpplint (only works in a git repo)# comment the line when this package is in a git repo and when# a copyright and license is added to all source filesset(ament_cmake_cpplint_FOUND TRUE)ament_lint_auto_find_test_dependencies()
endif()ament_package()
1.2. 编写节点
touch src/my_node.cpp
1.3. 编译
# 进入工作空间
cd ros2_ws# 全部编译
colcon build
# 只编译选中的包
colcon build --packages-select my_robot_driver
# python开发的节点编译
# Python 包开发(修改脚本无需重编译)
colcon build --symlink-install# 激活环境
source install/setup.bash
- 清理构建(相当于 make clean)
# colcon 没有 clean 命令,直接删除这三个目录即可。
rm -rf build/ install/ log/
1.4. 运行节点
# 激活环境
source install/setup.bashros2 run my_package my_node
2. launch文件组合节点
可以一次性启动一个或多个节点,而不需要每个节点单独 ros2 run
launch文件示例:
from launch import LaunchDescription
from launch_ros.actions import Nodedef generate_launch_description():return LaunchDescription([Node(namespace='ns', # 节点命名空间package='my_package', # 节点所在的 ROS 2 包executable='my_node', # 节点可执行文件名name='node_name', # 节点名称(可选,默认使用可执行文件名)output='screen', # 日志输出方式,可选 'screen' 或 'log'parameters=[{'param_name': 'value'}], # 参数列表remappings=[('/old/topic', '/new/topic')], # 话题重映射arguments=['--arg1', 'value1'] # 命令行参数),# =====================# 启动相机节点# =====================Node(namespace='camera',package='my_camera_pkg',executable='camera_node',output='screen',parameters=[{'device_id': 0, # 摄像头设备号'frame_rate': 30, # 帧率'image_width': 640,'image_height': 480}]),# =====================# 启动激光雷达节点# =====================Node(namespace='lidar',package='my_lidar_pkg',executable='lidar_node',output='screen',parameters=[{'port': '/dev/ttyUSB1','baudrate': 115200,'scan_rate': 10 # 扫描频率 Hz}]),])启动方式:
ros2 launch my_robot_launch cam_lidar.launch.py
3. ROS2调试工具
3.1. 查看节点信息
ros2 node info /node_name
3.2. 查看话题类型与消息
ros2 topic info /topic_name
ros2 topic type /topic_name
ros2 interface show sensor_msgs/Imu
4. 录包与播包
4.1. 录包命令
ros2 bag record [选项] [话题列表]
-a 或 --all: 录制所有当前活跃的话题
-o <目录名> 或 --output <目录名>例如:
ros2 bag record /imu/data /camera/image_raw /lidar/points
- 停止录制:Ctrl+C
4.2. ROS2录包结构
my_bag/
├── metadata.yaml
├── db.sqlite3
└── index/└── ...
| 文件/文件夹 | 作用 |
|---|---|
| metadata.yaml | 记录 bag 的元信息,包括话题、类型、频率、时长和序列化信息 |
| db.sqlite3 | 核心数据库文件,存储所有消息数据 |
| index/ | 可选索引文件夹,用于快速定位特定时间段消息 |
4.3. 播包命令
录包
ros2 bag play <bag_name>
查看信息:
ros2 bag info <bag_name>