20250815在荣品RD-RK3588-MID开发板的Android13下调通TP芯片FT8206
20250815在荣品RD-RK3588-MID开发板的Android13下调通TP芯片FT8206
2025/8/15 17:05
缘起:拿到卡迪的7寸LCD高亮屏,1200x1920分辨率,可以竖屏横用!
在22.4V/200mA下,亮度可以达到2000nit尼特。
既然使用的是荣品RD-RK3588的核心板。就直接借用荣品的驱动框架了!
虽然需要调试7寸屏,但是我买了一片8寸的1200x1920的屏,因此就直接在8寸屏的基础上改了!
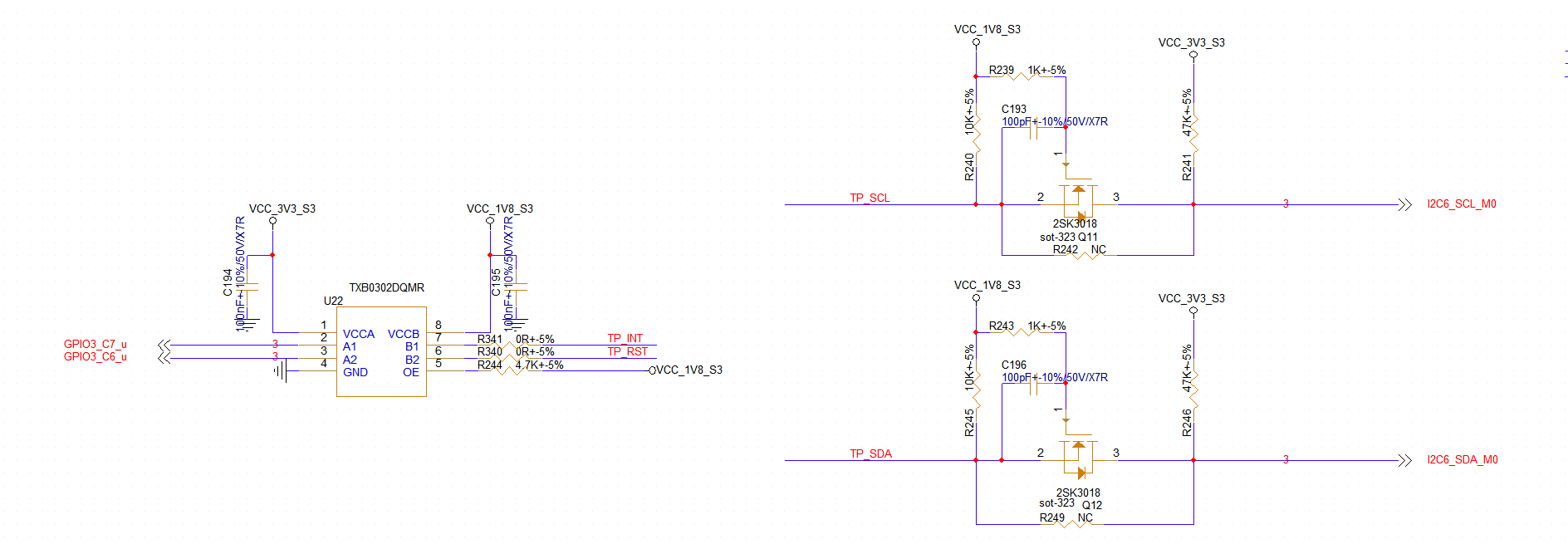
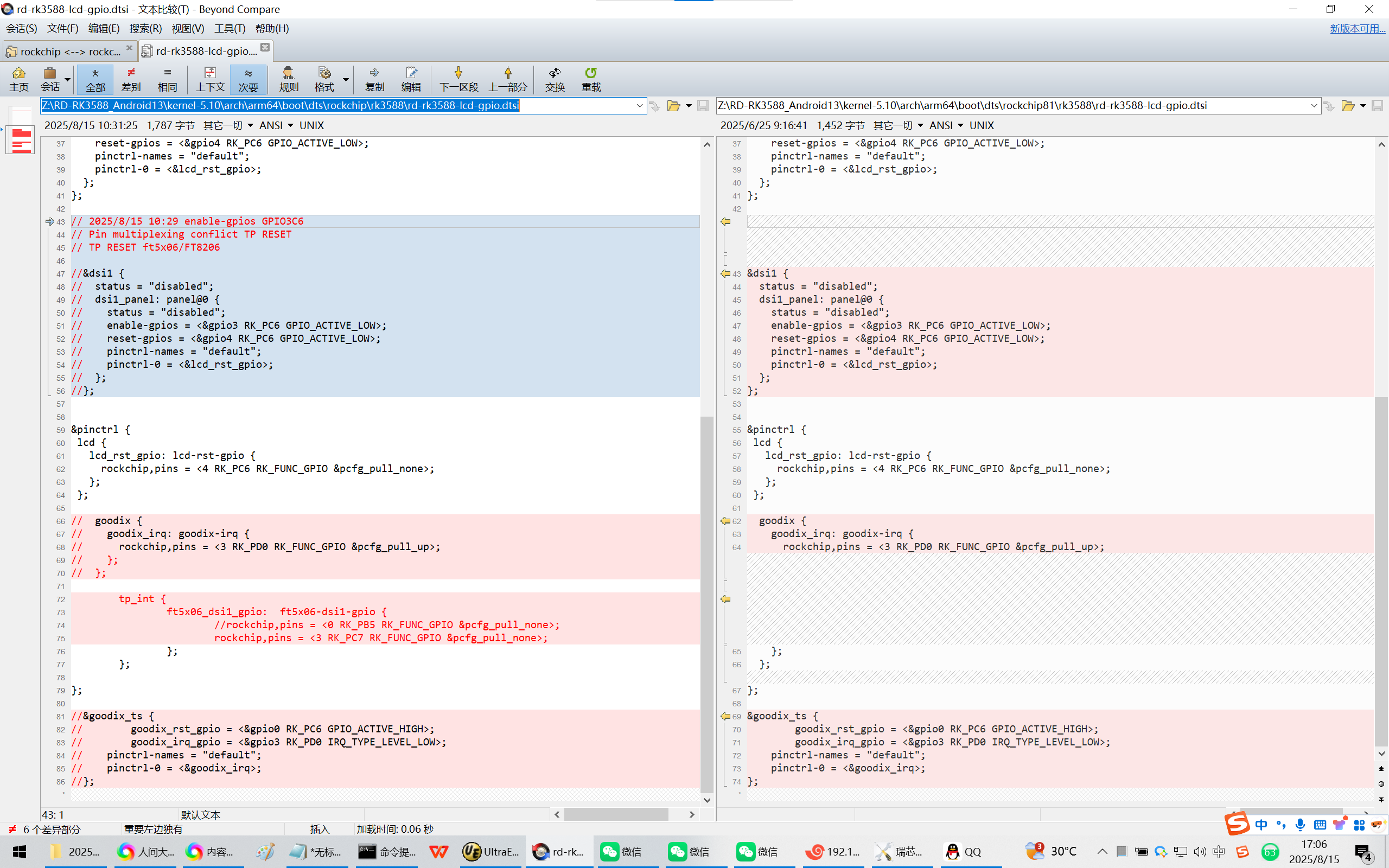
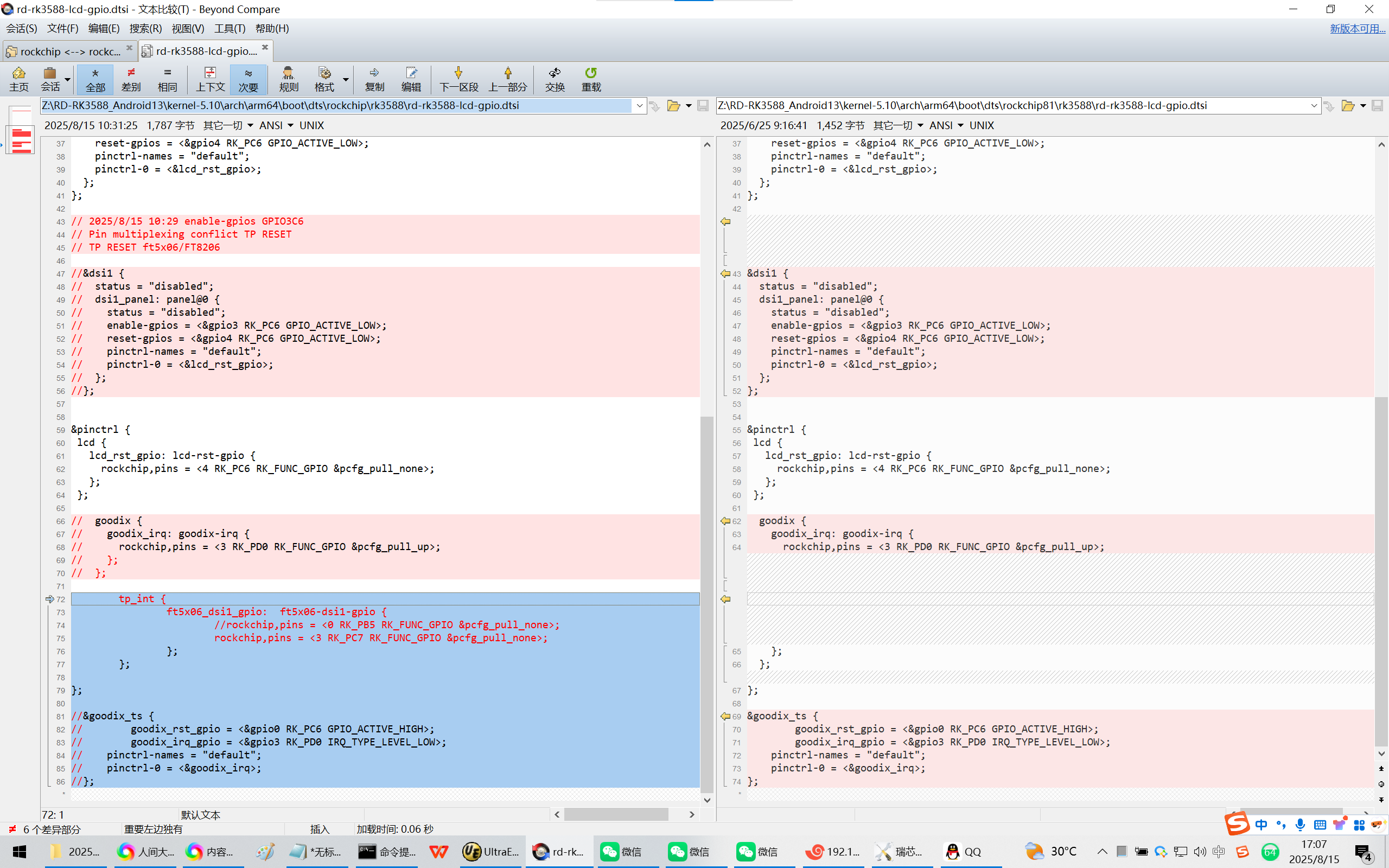
1、屏蔽掉荣品开发板所使用的TP驱动芯片GT911,打开FT8206【使用FT5X06的兼容驱动】
Z:\RD-RK3588_Android13\kernel-5.10\arch\arm64\boot\dts\rockchip\rk3588\rd-rk3588-lcd-gpio.dtsi
&dsi1 {
status = "disabled";
dsi1_panel: panel@0 {
status = "disabled";
enable-gpios = <&gpio3 RK_PC6 GPIO_ACTIVE_LOW>;
reset-gpios = <&gpio4 RK_PC6 GPIO_ACTIVE_LOW>;
pinctrl-names = "default";
pinctrl-0 = <&lcd_rst_gpio>;
};
};
&pinctrl {
lcd {
lcd_rst_gpio: lcd-rst-gpio {
rockchip,pins = <4 RK_PC6 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
goodix {
goodix_irq: goodix-irq {
rockchip,pins = <3 RK_PD0 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
};
&goodix_ts {
goodix_rst_gpio = <&gpio0 RK_PC6 GPIO_ACTIVE_HIGH>;
goodix_irq_gpio = <&gpio3 RK_PD0 IRQ_TYPE_LEVEL_LOW>;
pinctrl-names = "default";
pinctrl-0 = <&goodix_irq>;
};
修改为:
// 2025/8/15 10:29 enable-gpios GPIO3C6
// Pin multiplexing conflict TP RESET
// TP RESET ft5x06/FT8206
//&dsi1 {
// status = "disabled";
// dsi1_panel: panel@0 {
// status = "disabled";
// enable-gpios = <&gpio3 RK_PC6 GPIO_ACTIVE_LOW>;
// reset-gpios = <&gpio4 RK_PC6 GPIO_ACTIVE_LOW>;
// pinctrl-names = "default";
// pinctrl-0 = <&lcd_rst_gpio>;
// };
//};
&pinctrl {
lcd {
lcd_rst_gpio: lcd-rst-gpio {
rockchip,pins = <4 RK_PC6 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
// goodix {
// goodix_irq: goodix-irq {
// rockchip,pins = <3 RK_PD0 RK_FUNC_GPIO &pcfg_pull_up>;
// };
// };
tp_int {
ft5x06_dsi1_gpio: ft5x06-dsi1-gpio {
//rockchip,pins = <0 RK_PB5 RK_FUNC_GPIO &pcfg_pull_none>;
rockchip,pins = <3 RK_PC7 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
//&goodix_ts {
// goodix_rst_gpio = <&gpio0 RK_PC6 GPIO_ACTIVE_HIGH>;
// goodix_irq_gpio = <&gpio3 RK_PD0 IRQ_TYPE_LEVEL_LOW>;
// pinctrl-names = "default";
// pinctrl-0 = <&goodix_irq>;
//};
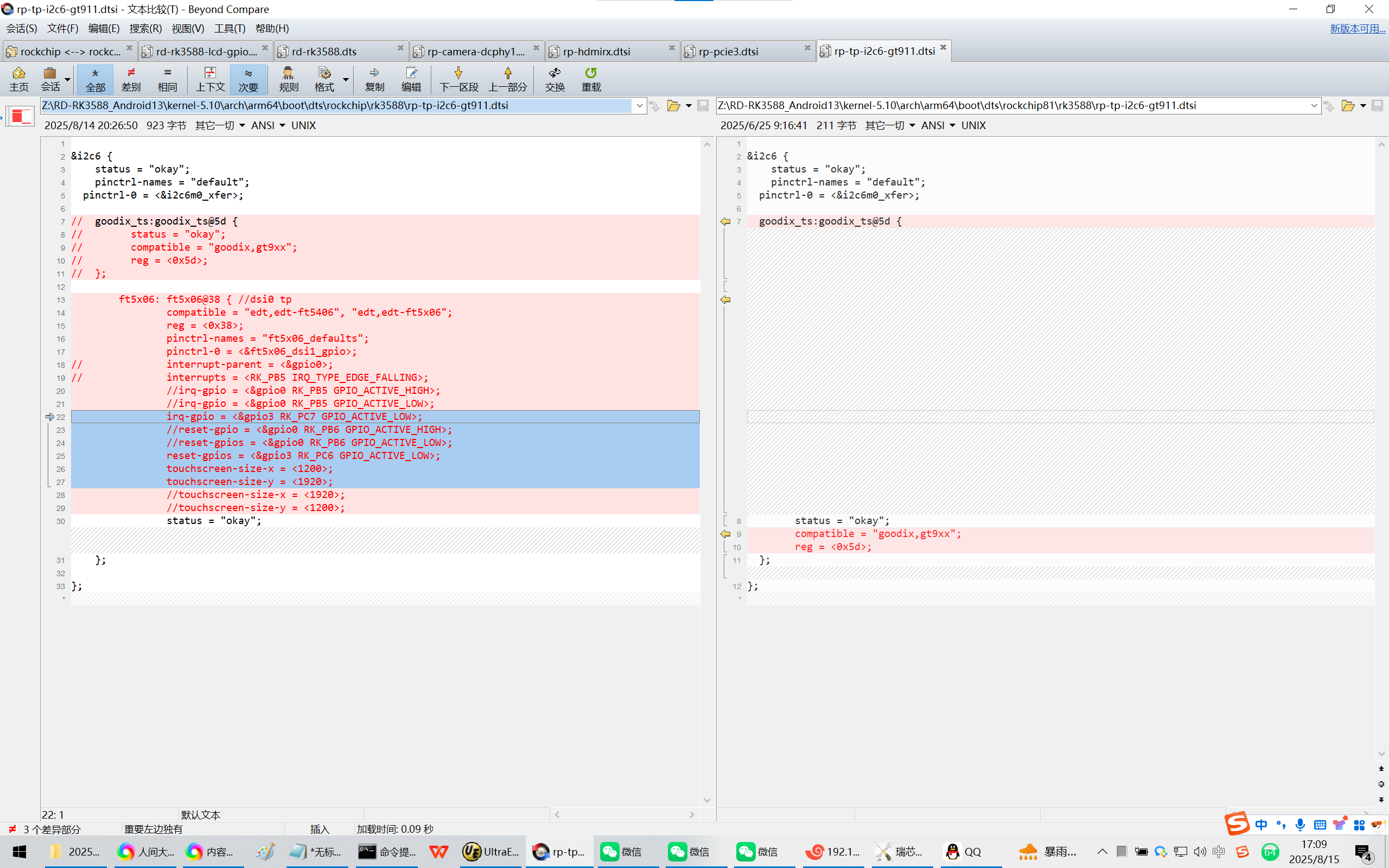
2、I2C挂载修正:
Z:\RD-RK3588_Android13\kernel-5.10\arch\arm64\boot\dts\rockchip\rk3588\rp-tp-i2c6-gt911.dtsi
&i2c6 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&i2c6m0_xfer>;
goodix_ts:goodix_ts@5d {
status = "okay";
compatible = "goodix,gt9xx";
reg = <0x5d>;
};
};
修改为:
&i2c6 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&i2c6m0_xfer>;
// goodix_ts:goodix_ts@5d {
// status = "okay";
// compatible = "goodix,gt9xx";
// reg = <0x5d>;
// };
ft5x06: ft5x06@38 { //dsi0 tp
compatible = "edt,edt-ft5406", "edt,edt-ft5x06";
reg = <0x38>;
pinctrl-names = "ft5x06_defaults";
pinctrl-0 = <&ft5x06_dsi1_gpio>;
// interrupt-parent = <&gpio0>;
// interrupts = <RK_PB5 IRQ_TYPE_EDGE_FALLING>;
//irq-gpio = <&gpio0 RK_PB5 GPIO_ACTIVE_HIGH>;
//irq-gpio = <&gpio0 RK_PB5 GPIO_ACTIVE_LOW>;
irq-gpio = <&gpio3 RK_PC7 GPIO_ACTIVE_LOW>;
//reset-gpio = <&gpio0 RK_PB6 GPIO_ACTIVE_HIGH>;
//reset-gpios = <&gpio0 RK_PB6 GPIO_ACTIVE_LOW>;
reset-gpios = <&gpio3 RK_PC6 GPIO_ACTIVE_LOW>;
touchscreen-size-x = <1200>;
touchscreen-size-y = <1920>;
//touchscreen-size-x = <1920>;
//touchscreen-size-y = <1200>;
status = "okay";
};
};
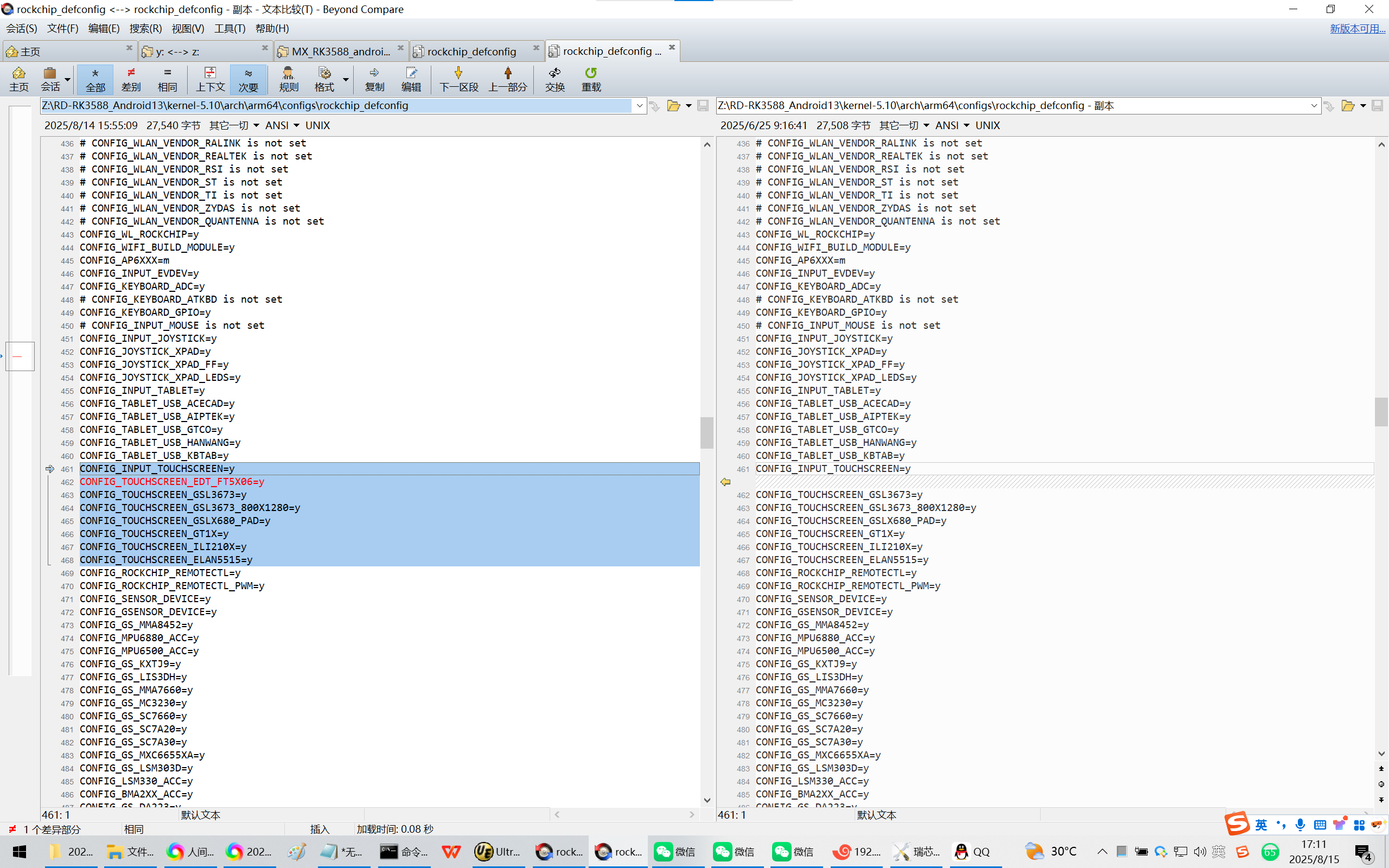
3、配置defconfig将驱动程序编译进内核boot.img:
Z:\RD-RK3588_Android13\kernel-5.10\arch\arm64\configs\rockchip_defconfig
CONFIG_INPUT_TOUCHSCREEN=y
CONFIG_TOUCHSCREEN_EDT_FT5X06=y
CONFIG_TOUCHSCREEN_GSL3673=y
CONFIG_TOUCHSCREEN_GSL3673_800X1280=y
CONFIG_TOUCHSCREEN_GSLX680_PAD=y
CONFIG_TOUCHSCREEN_GT1X=y
CONFIG_TOUCHSCREEN_ILI210X=y
CONFIG_TOUCHSCREEN_ELAN5515=y
4、
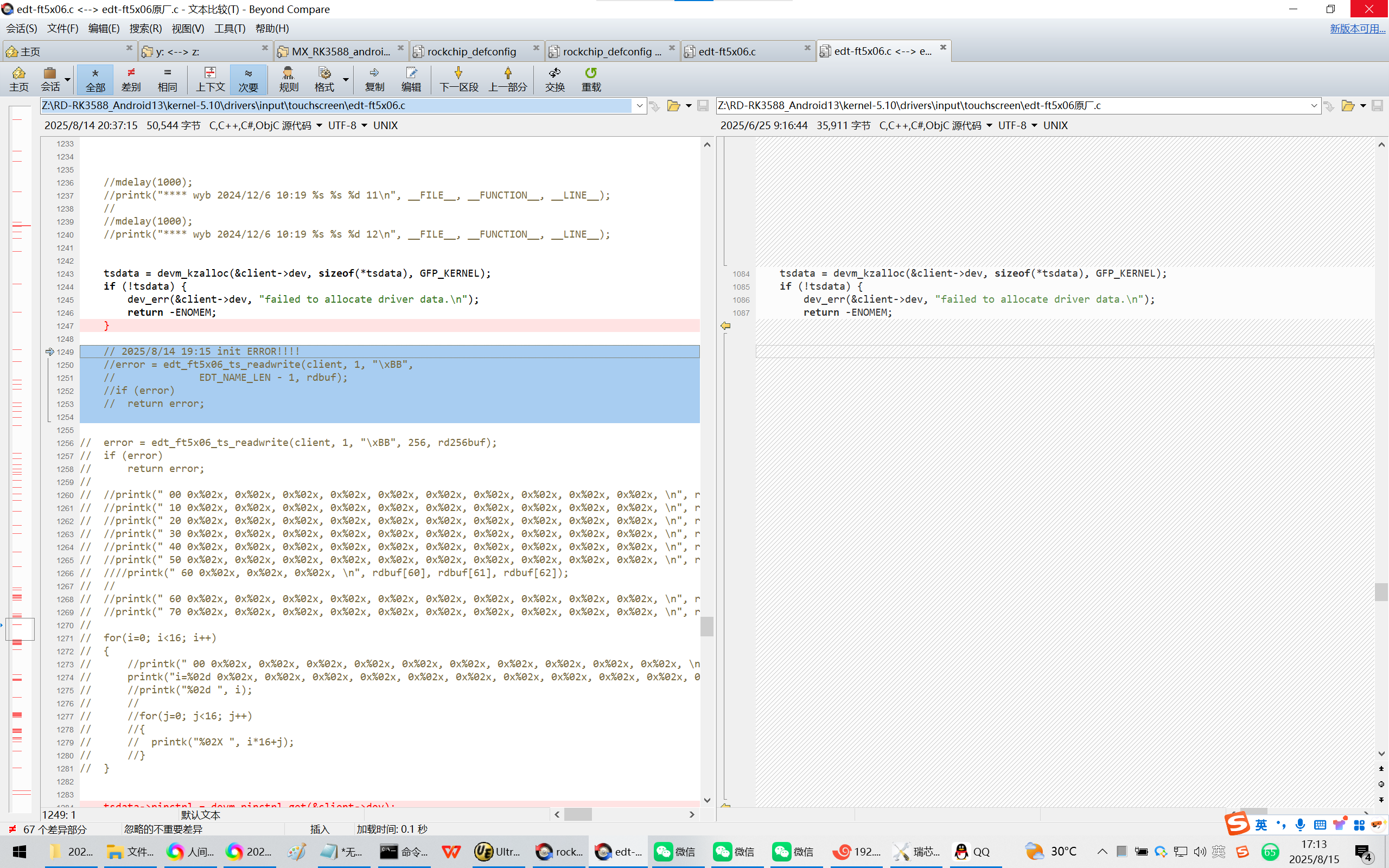
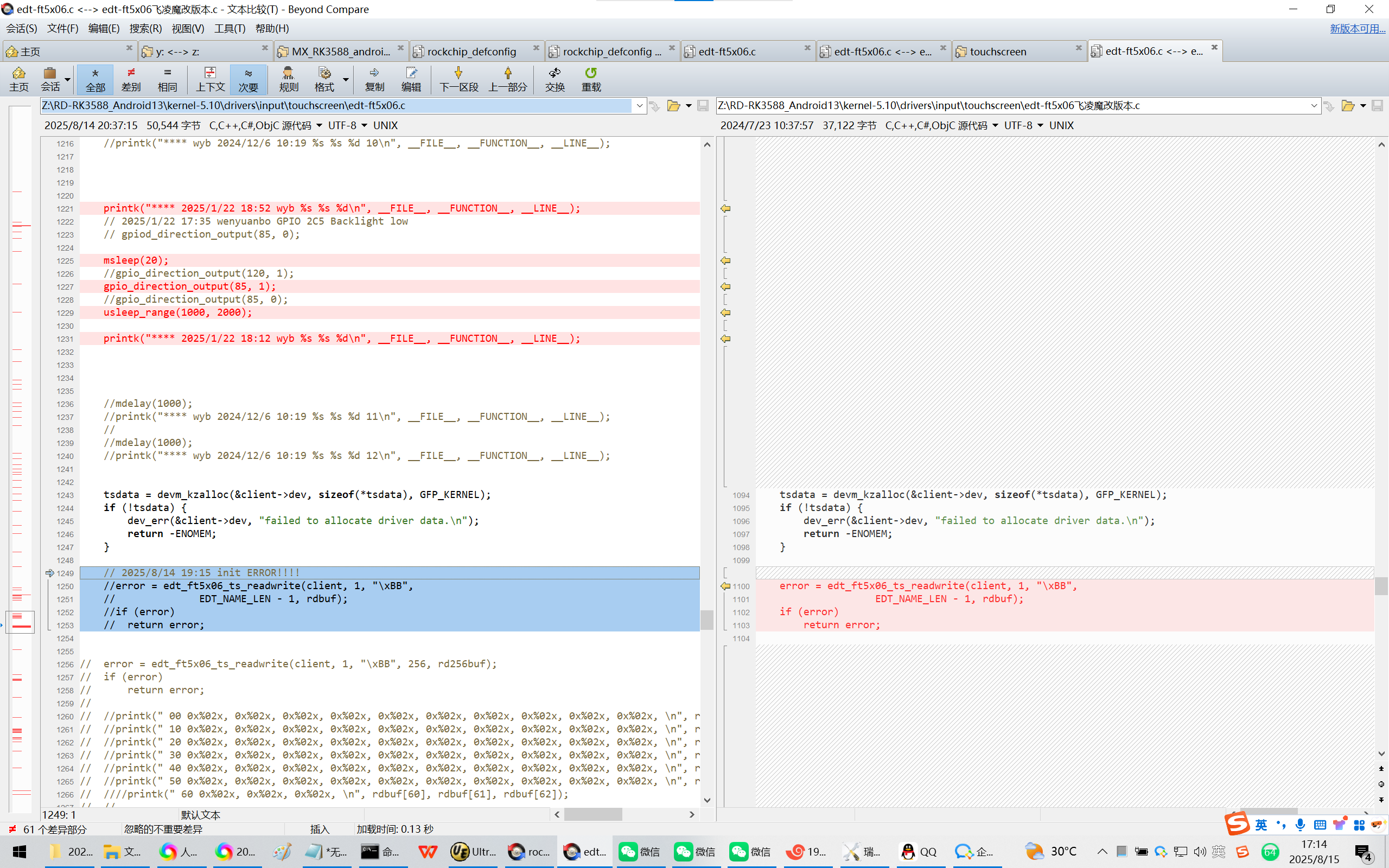
A、TP芯片FT8206使用的是FT5x06的代用驱动。
B、原始驱动 是由 飞凌魔改的版本,在地面站第一版本【荣品PRO-RK3566 + Anroid13 linux-5.10】上验证通过。
移植到 【荣品PRO-RK3566 + Anroid13 linux-5.10】不通。
定位到 这里 出错了,去掉就正常。
和 SDK里面的原始驱动比对,发现是这个代码块,是飞凌加的,在RK3566上正常,RK3588上出错,必须拿掉!
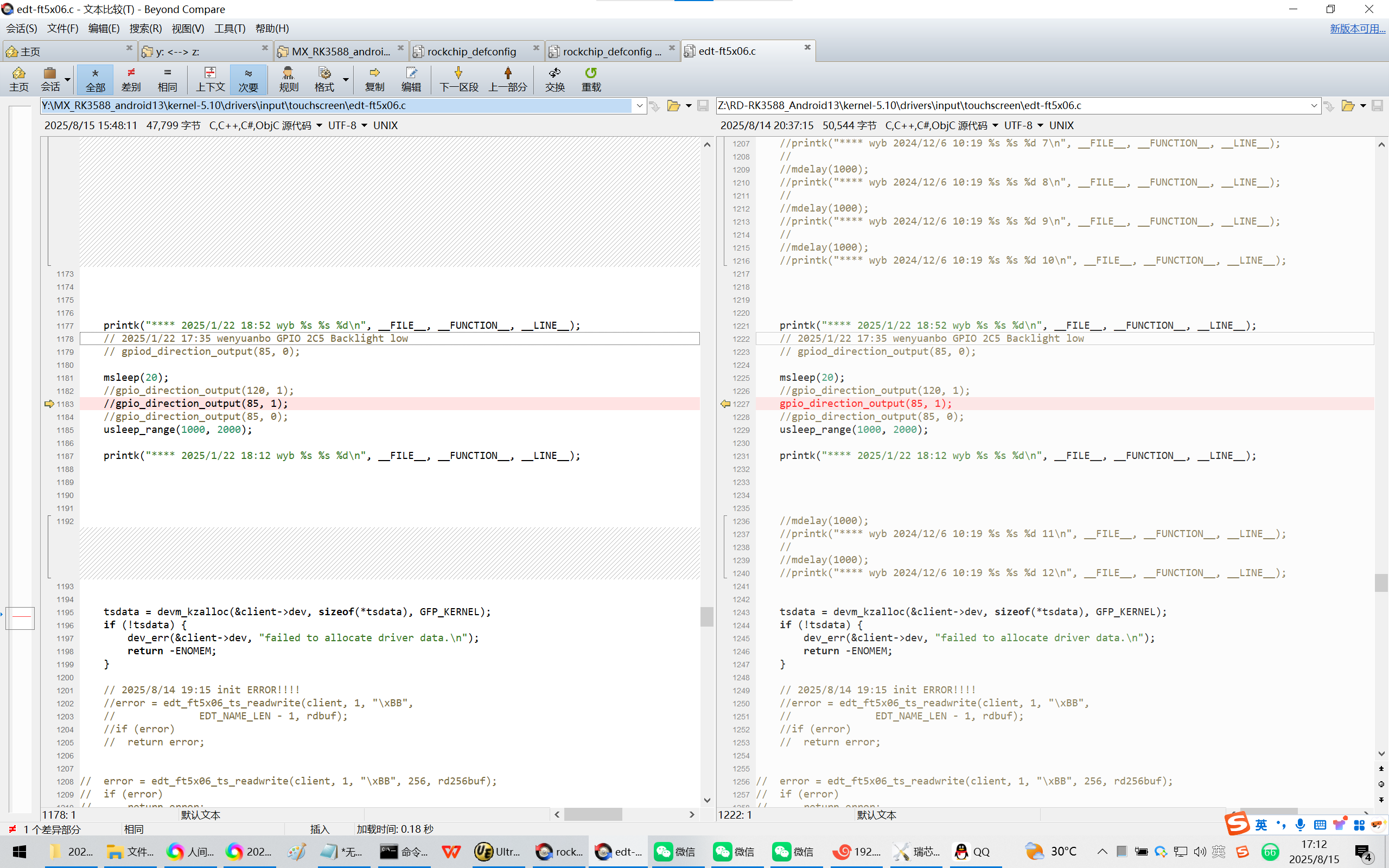
C、进probe的时候在荣品PRO-RK3566的Android13下必须加入延迟,大概1000ms/1s。
【荣品RD-RK3588-MID开发板的Android13下也建议加上!】
在buildroot下,荣品PRO-RK3566开发板可以不用加!^_
D、十点触控部分需要修正。
【飞凌魔改版本】
OK3588-android12-R5source\kernel-5.10\drivers\input\touchscreen\edt-ft5x06.c
Z:\RD-RK3588_Android13\kernel-5.10\drivers\input\touchscreen\edt-ft5x06.c
// SPDX-License-Identifier: GPL-2.0
/*
* Copyright (C) 2012 Simon Budig, <simon.budig@kernelconcepts.de>
* Daniel Wagener <daniel.wagener@kernelconcepts.de> (M09 firmware support)
* Lothar Waßmann <LW@KARO-electronics.de> (DT support)
*/
/*
* This is a driver for the EDT "Polytouch" family of touch controllers
* based on the FocalTech FT5x06 line of chips.
*
* Development of this driver has been sponsored by Glyn:
* http://www.glyn.com/Products/Displays
*/
#include <linux/debugfs.h>
#include <linux/delay.h>
#include <linux/gpio/consumer.h>
#include <linux/i2c.h>
#include <linux/interrupt.h>
#include <linux/input.h>
#include <linux/input/mt.h>
#include <linux/input/touchscreen.h>
#include <linux/irq.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/ratelimit.h>
#include <linux/regulator/consumer.h>
#include <linux/slab.h>
#include <linux/uaccess.h>
#include <asm/unaligned.h>
#include <linux/pinctrl/consumer.h>
#define WORK_REGISTER_THRESHOLD 0x00
#define WORK_REGISTER_REPORT_RATE 0x08
#define WORK_REGISTER_GAIN 0x30
#define WORK_REGISTER_OFFSET 0x31
#define WORK_REGISTER_NUM_X 0x33
#define WORK_REGISTER_NUM_Y 0x34
#define PMOD_REGISTER_ACTIVE 0x00
#define PMOD_REGISTER_HIBERNATE 0x03
#define M09_REGISTER_THRESHOLD 0x80
#define M09_REGISTER_GAIN 0x92
#define M09_REGISTER_OFFSET 0x93
#define M09_REGISTER_NUM_X 0x94
#define M09_REGISTER_NUM_Y 0x95
#define EV_REGISTER_THRESHOLD 0x40
#define EV_REGISTER_GAIN 0x41
#define EV_REGISTER_OFFSET_Y 0x45
#define EV_REGISTER_OFFSET_X 0x46
#define NO_REGISTER 0xff
#define WORK_REGISTER_OPMODE 0x3c
#define FACTORY_REGISTER_OPMODE 0x01
#define PMOD_REGISTER_OPMODE 0xa5
#define TOUCH_EVENT_DOWN 0x00
#define TOUCH_EVENT_UP 0x01
#define TOUCH_EVENT_ON 0x02
#define TOUCH_EVENT_RESERVED 0x03
#define EDT_NAME_LEN 23
#define EDT_SWITCH_MODE_RETRIES 10
#define EDT_SWITCH_MODE_DELAY 5 /* msec */
#define EDT_RAW_DATA_RETRIES 100
#define EDT_RAW_DATA_DELAY 1000 /* usec */
enum edt_pmode {
EDT_PMODE_NOT_SUPPORTED,
EDT_PMODE_HIBERNATE,
EDT_PMODE_POWEROFF,
};
enum edt_ver {
EDT_M06,
EDT_M09,
EDT_M12,
EV_FT,
GENERIC_FT,
};
struct edt_reg_addr {
int reg_threshold;
int reg_report_rate;
int reg_gain;
int reg_offset;
int reg_offset_x;
int reg_offset_y;
int reg_num_x;
int reg_num_y;
};
struct edt_ft5x06_ts_data {
struct i2c_client *client;
struct input_dev *input;
struct touchscreen_properties prop;
u16 num_x;
u16 num_y;
struct regulator *vcc;
struct gpio_desc *reset_gpio;
struct gpio_desc *wake_gpio;
struct gpio_desc *int_gpio;
#if defined(CONFIG_DEBUG_FS)
struct dentry *debug_dir;
u8 *raw_buffer;
size_t raw_bufsize;
#endif
struct mutex mutex;
bool factory_mode;
enum edt_pmode suspend_mode;
int threshold;
int gain;
int offset;
int offset_x;
int offset_y;
int report_rate;
int max_support_points;
char name[EDT_NAME_LEN];
struct edt_reg_addr reg_addr;
enum edt_ver version;
struct pinctrl *pinctrl;
struct pinctrl_state *pins_default;
};
struct edt_i2c_chip_data {
int max_support_points;
};
static int edt_ft5x06_ts_readwrite(struct i2c_client *client,
u16 wr_len, u8 *wr_buf,
u16 rd_len, u8 *rd_buf)
{
struct i2c_msg wrmsg[2];
int i = 0;
int ret;
//printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
if (wr_len) {
wrmsg[i].addr = client->addr;
wrmsg[i].flags = 0;
wrmsg[i].len = wr_len;
wrmsg[i].buf = wr_buf;
i++;
}
if (rd_len) {
wrmsg[i].addr = client->addr;
wrmsg[i].flags = I2C_M_RD;
wrmsg[i].len = rd_len;
wrmsg[i].buf = rd_buf;
i++;
}
ret = i2c_transfer(client->adapter, wrmsg, i);
if (ret < 0)
return ret;
if (ret != i)
return -EIO;
return 0;
}
static bool edt_ft5x06_ts_check_crc(struct edt_ft5x06_ts_data *tsdata,
u8 *buf, int buflen)
{
int i;
u8 crc = 0;
//printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
for (i = 0; i < buflen - 1; i++)
crc ^= buf[i];
if (crc != buf[buflen-1]) {
dev_err_ratelimited(&tsdata->client->dev,
"crc error: 0x%02x expected, got 0x%02x\n",
crc, buf[buflen-1]);
return false;
}
return true;
}
static irqreturn_t edt_ft5x06_ts_isr(int irq, void *dev_id)
{
struct edt_ft5x06_ts_data *tsdata = dev_id;
struct device *dev = &tsdata->client->dev;
u8 cmd;
u8 rdbuf[63];
int i, type, x, y, id;
int offset, tplen, datalen, crclen;
int error;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
switch (tsdata->version) {
case EDT_M06:
cmd = 0xf9; /* tell the controller to send touch data */
offset = 5; /* where the actual touch data starts */
tplen = 4; /* data comes in so called frames */
crclen = 1; /* length of the crc data */
break;
case EDT_M09:
case EDT_M12:
case EV_FT:
case GENERIC_FT:
cmd = 0x0;
offset = 3;
tplen = 6;
crclen = 0;
break;
default:
goto out;
}
memset(rdbuf, 0, sizeof(rdbuf));
datalen = tplen * tsdata->max_support_points + offset + crclen;
error = edt_ft5x06_ts_readwrite(tsdata->client,
sizeof(cmd), &cmd,
datalen, rdbuf);
if (error) {
dev_err_ratelimited(dev, "Unable to fetch data, error: %d\n",
error);
goto out;
}
/* M09/M12 does not send header or CRC */
if (tsdata->version == EDT_M06) {
if (rdbuf[0] != 0xaa || rdbuf[1] != 0xaa ||
rdbuf[2] != datalen) {
dev_err_ratelimited(dev,
"Unexpected header: %02x%02x%02x!\n",
rdbuf[0], rdbuf[1], rdbuf[2]);
goto out;
}
if (!edt_ft5x06_ts_check_crc(tsdata, rdbuf, datalen))
goto out;
}
for (i = 0; i < tsdata->max_support_points; i++) {
u8 *buf = &rdbuf[i * tplen + offset];
type = buf[0] >> 6;
/* ignore Reserved events */
if (type == TOUCH_EVENT_RESERVED)
continue;
/* M06 sometimes sends bogus coordinates in TOUCH_DOWN */
if (tsdata->version == EDT_M06 && type == TOUCH_EVENT_DOWN)
continue;
x = get_unaligned_be16(buf) & 0x0fff;
y = get_unaligned_be16(buf + 2) & 0x0fff;
/* The FT5x26 send the y coordinate first */
if (tsdata->version == EV_FT)
swap(x, y);
id = (buf[2] >> 4) & 0x0f;
input_mt_slot(tsdata->input, id);
if (input_mt_report_slot_state(tsdata->input, MT_TOOL_FINGER,
type != TOUCH_EVENT_UP))
{
//touchscreen_report_pos(tsdata->input, &tsdata->prop, x, y, true);
//printk("**** wyb 2024/4/3 19:57 %s %s %d x=%d, y=%d, x2=%d, y2=%d\n", __FILE__, __FUNCTION__, __LINE__, x, y, y, 1200-x);
// system rotation : Counterclockwise rotation 90
//touchscreen_report_pos(tsdata->input, &tsdata->prop, 1200-x, 1920-y, true);
//touchscreen_report_pos(tsdata->input, &tsdata->prop, x, y, true);
touchscreen_report_pos(tsdata->input, &tsdata->prop, x, 1920-y, true);
//touchscreen_report_pos(tsdata->input, &tsdata->prop, y, x, true);
//printk("**** wyb 2024/4/3 19:57 %s %s %d x=%d, y=%d, x2=%d, y2=%d\n", __FILE__, __FUNCTION__, __LINE__, x, y, 1200-x, 1920-y);
printk("**** wyb 2025/7/31 10:29 %s %s %d x=%d, y=%d, x2=%d, y2=%d i=%d, tsdata->max_support_points=%d\n", __FILE__, __FUNCTION__, __LINE__, x, y, 1200-x, 1920-y, i, tsdata->max_support_points);
//touchscreen_report_pos(tsdata->input, &tsdata->prop, 1920-y, 1200-x, true);
//printk("**** wyb 2024/4/3 19:57 %s %s %d x=%d, y=%d, x2=%d, y2=%d\n", __FILE__, __FUNCTION__, __LINE__, x, y, 1920-y, 1200-x);
//touchscreen_report_pos(tsdata->input, &tsdata->prop, 1200-x, 1920-y, true);
//printk("**** wyb 2024/4/3 19:57 %s %s %d x=%d, y=%d, x2=%d, y2=%d\n", __FILE__, __FUNCTION__, __LINE__, x, y, 1200-x, 1920-y);
//touchscreen_report_pos(tsdata->input, &tsdata->prop, 1920-x, 1200-y, true);
//touchscreen_report_pos(tsdata->input, &tsdata->prop, 1920-y, 1200-x, true);
//touchscreen_report_pos(tsdata->input, &tsdata->prop, y, 1200-x, true);
//printk("**** wyb 2024/4/3 19:57 %s %s %d x=%d, y=%d, x2=%d, y2=%d\n", __FILE__, __FUNCTION__, __LINE__, x, y, y, 1200-x);
}
}
input_mt_report_pointer_emulation(tsdata->input, true);
input_sync(tsdata->input);
out:
return IRQ_HANDLED;
}
static int edt_ft5x06_register_write(struct edt_ft5x06_ts_data *tsdata,
u8 addr, u8 value)
{
u8 wrbuf[4];
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
switch (tsdata->version) {
case EDT_M06:
wrbuf[0] = tsdata->factory_mode ? 0xf3 : 0xfc;
wrbuf[1] = tsdata->factory_mode ? addr & 0x7f : addr & 0x3f;
wrbuf[2] = value;
wrbuf[3] = wrbuf[0] ^ wrbuf[1] ^ wrbuf[2];
return edt_ft5x06_ts_readwrite(tsdata->client, 4,
wrbuf, 0, NULL);
case EDT_M09:
case EDT_M12:
case EV_FT:
case GENERIC_FT:
wrbuf[0] = addr;
wrbuf[1] = value;
return edt_ft5x06_ts_readwrite(tsdata->client, 2,
wrbuf, 0, NULL);
default:
return -EINVAL;
}
}
static int edt_ft5x06_register_read(struct edt_ft5x06_ts_data *tsdata,
u8 addr)
{
u8 wrbuf[2], rdbuf[2];
int error;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
switch (tsdata->version) {
case EDT_M06:
wrbuf[0] = tsdata->factory_mode ? 0xf3 : 0xfc;
wrbuf[1] = tsdata->factory_mode ? addr & 0x7f : addr & 0x3f;
wrbuf[1] |= tsdata->factory_mode ? 0x80 : 0x40;
error = edt_ft5x06_ts_readwrite(tsdata->client, 2, wrbuf, 2,
rdbuf);
if (error)
return error;
if ((wrbuf[0] ^ wrbuf[1] ^ rdbuf[0]) != rdbuf[1]) {
dev_err(&tsdata->client->dev,
"crc error: 0x%02x expected, got 0x%02x\n",
wrbuf[0] ^ wrbuf[1] ^ rdbuf[0],
rdbuf[1]);
return -EIO;
}
break;
case EDT_M09:
case EDT_M12:
case EV_FT:
case GENERIC_FT:
wrbuf[0] = addr;
error = edt_ft5x06_ts_readwrite(tsdata->client, 1,
wrbuf, 1, rdbuf);
if (error)
return error;
break;
default:
return -EINVAL;
}
return rdbuf[0];
}
struct edt_ft5x06_attribute {
struct device_attribute dattr;
size_t field_offset;
u8 limit_low;
u8 limit_high;
u8 addr_m06;
u8 addr_m09;
u8 addr_ev;
};
#define EDT_ATTR(_field, _mode, _addr_m06, _addr_m09, _addr_ev, \
_limit_low, _limit_high) \
struct edt_ft5x06_attribute edt_ft5x06_attr_##_field = { \
.dattr = __ATTR(_field, _mode, \
edt_ft5x06_setting_show, \
edt_ft5x06_setting_store), \
.field_offset = offsetof(struct edt_ft5x06_ts_data, _field), \
.addr_m06 = _addr_m06, \
.addr_m09 = _addr_m09, \
.addr_ev = _addr_ev, \
.limit_low = _limit_low, \
.limit_high = _limit_high, \
}
static ssize_t edt_ft5x06_setting_show(struct device *dev,
struct device_attribute *dattr,
char *buf)
{
struct i2c_client *client = to_i2c_client(dev);
struct edt_ft5x06_ts_data *tsdata = i2c_get_clientdata(client);
struct edt_ft5x06_attribute *attr =
container_of(dattr, struct edt_ft5x06_attribute, dattr);
u8 *field = (u8 *)tsdata + attr->field_offset;
int val;
size_t count = 0;
int error = 0;
u8 addr;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
mutex_lock(&tsdata->mutex);
if (tsdata->factory_mode) {
error = -EIO;
goto out;
}
switch (tsdata->version) {
case EDT_M06:
addr = attr->addr_m06;
break;
case EDT_M09:
case EDT_M12:
case GENERIC_FT:
addr = attr->addr_m09;
break;
case EV_FT:
addr = attr->addr_ev;
break;
default:
error = -ENODEV;
goto out;
}
if (addr != NO_REGISTER) {
val = edt_ft5x06_register_read(tsdata, addr);
if (val < 0) {
error = val;
dev_err(&tsdata->client->dev,
"Failed to fetch attribute %s, error %d\n",
dattr->attr.name, error);
goto out;
}
} else {
val = *field;
}
if (val != *field) {
dev_warn(&tsdata->client->dev,
"%s: read (%d) and stored value (%d) differ\n",
dattr->attr.name, val, *field);
*field = val;
}
count = scnprintf(buf, PAGE_SIZE, "%d\n", val);
out:
mutex_unlock(&tsdata->mutex);
return error ?: count;
}
static ssize_t edt_ft5x06_setting_store(struct device *dev,
struct device_attribute *dattr,
const char *buf, size_t count)
{
struct i2c_client *client = to_i2c_client(dev);
struct edt_ft5x06_ts_data *tsdata = i2c_get_clientdata(client);
struct edt_ft5x06_attribute *attr =
container_of(dattr, struct edt_ft5x06_attribute, dattr);
u8 *field = (u8 *)tsdata + attr->field_offset;
unsigned int val;
int error;
u8 addr;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
mutex_lock(&tsdata->mutex);
if (tsdata->factory_mode) {
error = -EIO;
goto out;
}
error = kstrtouint(buf, 0, &val);
if (error)
goto out;
if (val < attr->limit_low || val > attr->limit_high) {
error = -ERANGE;
goto out;
}
switch (tsdata->version) {
case EDT_M06:
addr = attr->addr_m06;
break;
case EDT_M09:
case EDT_M12:
case GENERIC_FT:
addr = attr->addr_m09;
break;
case EV_FT:
addr = attr->addr_ev;
break;
default:
error = -ENODEV;
goto out;
}
if (addr != NO_REGISTER) {
error = edt_ft5x06_register_write(tsdata, addr, val);
if (error) {
dev_err(&tsdata->client->dev,
"Failed to update attribute %s, error: %d\n",
dattr->attr.name, error);
goto out;
}
}
*field = val;
out:
mutex_unlock(&tsdata->mutex);
return error ?: count;
}
/* m06, m09: range 0-31, m12: range 0-5 */
static EDT_ATTR(gain, S_IWUSR | S_IRUGO, WORK_REGISTER_GAIN,
M09_REGISTER_GAIN, EV_REGISTER_GAIN, 0, 31);
/* m06, m09: range 0-31, m12: range 0-16 */
static EDT_ATTR(offset, S_IWUSR | S_IRUGO, WORK_REGISTER_OFFSET,
M09_REGISTER_OFFSET, NO_REGISTER, 0, 31);
/* m06, m09, m12: no supported, ev_ft: range 0-80 */
static EDT_ATTR(offset_x, S_IWUSR | S_IRUGO, NO_REGISTER, NO_REGISTER,
EV_REGISTER_OFFSET_X, 0, 80);
/* m06, m09, m12: no supported, ev_ft: range 0-80 */
static EDT_ATTR(offset_y, S_IWUSR | S_IRUGO, NO_REGISTER, NO_REGISTER,
EV_REGISTER_OFFSET_Y, 0, 80);
/* m06: range 20 to 80, m09: range 0 to 30, m12: range 1 to 255... */
static EDT_ATTR(threshold, S_IWUSR | S_IRUGO, WORK_REGISTER_THRESHOLD,
M09_REGISTER_THRESHOLD, EV_REGISTER_THRESHOLD, 0, 255);
/* m06: range 3 to 14, m12: (0x64: 100Hz) */
static EDT_ATTR(report_rate, S_IWUSR | S_IRUGO, WORK_REGISTER_REPORT_RATE,
NO_REGISTER, NO_REGISTER, 0, 255);
static struct attribute *edt_ft5x06_attrs[] = {
&edt_ft5x06_attr_gain.dattr.attr,
&edt_ft5x06_attr_offset.dattr.attr,
&edt_ft5x06_attr_offset_x.dattr.attr,
&edt_ft5x06_attr_offset_y.dattr.attr,
&edt_ft5x06_attr_threshold.dattr.attr,
&edt_ft5x06_attr_report_rate.dattr.attr,
NULL
};
static const struct attribute_group edt_ft5x06_attr_group = {
.attrs = edt_ft5x06_attrs,
};
static void edt_ft5x06_restore_reg_parameters(struct edt_ft5x06_ts_data *tsdata)
{
struct edt_reg_addr *reg_addr = &tsdata->reg_addr;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
edt_ft5x06_register_write(tsdata, reg_addr->reg_threshold,
tsdata->threshold);
edt_ft5x06_register_write(tsdata, reg_addr->reg_gain,
tsdata->gain);
if (reg_addr->reg_offset != NO_REGISTER)
edt_ft5x06_register_write(tsdata, reg_addr->reg_offset,
tsdata->offset);
if (reg_addr->reg_offset_x != NO_REGISTER)
edt_ft5x06_register_write(tsdata, reg_addr->reg_offset_x,
tsdata->offset_x);
if (reg_addr->reg_offset_y != NO_REGISTER)
edt_ft5x06_register_write(tsdata, reg_addr->reg_offset_y,
tsdata->offset_y);
if (reg_addr->reg_report_rate != NO_REGISTER)
edt_ft5x06_register_write(tsdata, reg_addr->reg_report_rate,
tsdata->report_rate);
}
#ifdef CONFIG_DEBUG_FS
static int edt_ft5x06_factory_mode(struct edt_ft5x06_ts_data *tsdata)
{
struct i2c_client *client = tsdata->client;
int retries = EDT_SWITCH_MODE_RETRIES;
int ret;
int error;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
if (tsdata->version != EDT_M06) {
dev_err(&client->dev,
"No factory mode support for non-M06 devices\n");
return -EINVAL;
}
disable_irq(client->irq);
if (!tsdata->raw_buffer) {
tsdata->raw_bufsize = tsdata->num_x * tsdata->num_y *
sizeof(u16);
tsdata->raw_buffer = kzalloc(tsdata->raw_bufsize, GFP_KERNEL);
if (!tsdata->raw_buffer) {
error = -ENOMEM;
goto err_out;
}
}
/* mode register is 0x3c when in the work mode */
error = edt_ft5x06_register_write(tsdata, WORK_REGISTER_OPMODE, 0x03);
if (error) {
dev_err(&client->dev,
"failed to switch to factory mode, error %d\n", error);
goto err_out;
}
tsdata->factory_mode = true;
do {
mdelay(EDT_SWITCH_MODE_DELAY);
/* mode register is 0x01 when in factory mode */
ret = edt_ft5x06_register_read(tsdata, FACTORY_REGISTER_OPMODE);
if (ret == 0x03)
break;
} while (--retries > 0);
if (retries == 0) {
dev_err(&client->dev, "not in factory mode after %dms.\n",
EDT_SWITCH_MODE_RETRIES * EDT_SWITCH_MODE_DELAY);
error = -EIO;
goto err_out;
}
printk("---- wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
err_out:
kfree(tsdata->raw_buffer);
tsdata->raw_buffer = NULL;
tsdata->factory_mode = false;
enable_irq(client->irq);
printk("---- wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
return error;
}
static int edt_ft5x06_work_mode(struct edt_ft5x06_ts_data *tsdata)
{
struct i2c_client *client = tsdata->client;
int retries = EDT_SWITCH_MODE_RETRIES;
int ret;
int error;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
/* mode register is 0x01 when in the factory mode */
error = edt_ft5x06_register_write(tsdata, FACTORY_REGISTER_OPMODE, 0x1);
if (error) {
dev_err(&client->dev,
"failed to switch to work mode, error: %d\n", error);
return error;
}
tsdata->factory_mode = false;
do {
mdelay(EDT_SWITCH_MODE_DELAY);
/* mode register is 0x01 when in factory mode */
ret = edt_ft5x06_register_read(tsdata, WORK_REGISTER_OPMODE);
if (ret == 0x01)
break;
} while (--retries > 0);
if (retries == 0) {
dev_err(&client->dev, "not in work mode after %dms.\n",
EDT_SWITCH_MODE_RETRIES * EDT_SWITCH_MODE_DELAY);
tsdata->factory_mode = true;
return -EIO;
}
kfree(tsdata->raw_buffer);
tsdata->raw_buffer = NULL;
edt_ft5x06_restore_reg_parameters(tsdata);
enable_irq(client->irq);
printk("---- wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
}
static int edt_ft5x06_debugfs_mode_get(void *data, u64 *mode)
{
struct edt_ft5x06_ts_data *tsdata = data;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
*mode = tsdata->factory_mode;
return 0;
};
static int edt_ft5x06_debugfs_mode_set(void *data, u64 mode)
{
struct edt_ft5x06_ts_data *tsdata = data;
int retval = 0;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
if (mode > 1)
return -ERANGE;
mutex_lock(&tsdata->mutex);
if (mode != tsdata->factory_mode) {
retval = mode ? edt_ft5x06_factory_mode(tsdata) :
edt_ft5x06_work_mode(tsdata);
}
mutex_unlock(&tsdata->mutex);
printk("---- wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
return retval;
};
DEFINE_SIMPLE_ATTRIBUTE(debugfs_mode_fops, edt_ft5x06_debugfs_mode_get,
edt_ft5x06_debugfs_mode_set, "%llu\n");
static ssize_t edt_ft5x06_debugfs_raw_data_read(struct file *file,
char __user *buf, size_t count, loff_t *off)
{
struct edt_ft5x06_ts_data *tsdata = file->private_data;
struct i2c_client *client = tsdata->client;
int retries = EDT_RAW_DATA_RETRIES;
int val, i, error;
size_t read = 0;
int colbytes;
char wrbuf[3];
u8 *rdbuf;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
if (*off < 0 || *off >= tsdata->raw_bufsize)
return 0;
mutex_lock(&tsdata->mutex);
if (!tsdata->factory_mode || !tsdata->raw_buffer) {
error = -EIO;
goto out;
}
error = edt_ft5x06_register_write(tsdata, 0x08, 0x01);
if (error) {
dev_dbg(&client->dev,
"failed to write 0x08 register, error %d\n", error);
goto out;
}
do {
usleep_range(EDT_RAW_DATA_DELAY, EDT_RAW_DATA_DELAY + 100);
val = edt_ft5x06_register_read(tsdata, 0x08);
if (val < 1)
break;
} while (--retries > 0);
if (val < 0) {
error = val;
dev_dbg(&client->dev,
"failed to read 0x08 register, error %d\n", error);
goto out;
}
if (retries == 0) {
dev_dbg(&client->dev,
"timed out waiting for register to settle\n");
error = -ETIMEDOUT;
goto out;
}
rdbuf = tsdata->raw_buffer;
colbytes = tsdata->num_y * sizeof(u16);
wrbuf[0] = 0xf5;
wrbuf[1] = 0x0e;
for (i = 0; i < tsdata->num_x; i++) {
wrbuf[2] = i; /* column index */
error = edt_ft5x06_ts_readwrite(tsdata->client,
sizeof(wrbuf), wrbuf,
colbytes, rdbuf);
if (error)
goto out;
rdbuf += colbytes;
}
read = min_t(size_t, count, tsdata->raw_bufsize - *off);
if (copy_to_user(buf, tsdata->raw_buffer + *off, read)) {
error = -EFAULT;
goto out;
}
*off += read;
out:
mutex_unlock(&tsdata->mutex);
printk("---- wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
return error ?: read;
};
static const struct file_operations debugfs_raw_data_fops = {
.open = simple_open,
.read = edt_ft5x06_debugfs_raw_data_read,
};
static void edt_ft5x06_ts_prepare_debugfs(struct edt_ft5x06_ts_data *tsdata,
const char *debugfs_name)
{
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
tsdata->debug_dir = debugfs_create_dir(debugfs_name, NULL);
debugfs_create_u16("num_x", S_IRUSR, tsdata->debug_dir, &tsdata->num_x);
debugfs_create_u16("num_y", S_IRUSR, tsdata->debug_dir, &tsdata->num_y);
debugfs_create_file("mode", S_IRUSR | S_IWUSR,
tsdata->debug_dir, tsdata, &debugfs_mode_fops);
debugfs_create_file("raw_data", S_IRUSR,
tsdata->debug_dir, tsdata, &debugfs_raw_data_fops);
}
static void edt_ft5x06_ts_teardown_debugfs(struct edt_ft5x06_ts_data *tsdata)
{
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
debugfs_remove_recursive(tsdata->debug_dir);
kfree(tsdata->raw_buffer);
}
#else
static int edt_ft5x06_factory_mode(struct edt_ft5x06_ts_data *tsdata)
{
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
return -ENOSYS;
}
static void edt_ft5x06_ts_prepare_debugfs(struct edt_ft5x06_ts_data *tsdata,
const char *debugfs_name)
{
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
}
static void edt_ft5x06_ts_teardown_debugfs(struct edt_ft5x06_ts_data *tsdata)
{
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
}
#endif /* CONFIG_DEBUGFS */
static int edt_ft5x06_ts_identify(struct i2c_client *client,
struct edt_ft5x06_ts_data *tsdata,
char *fw_version)
{
u8 rdbuf[EDT_NAME_LEN];
char *p;
int error;
char *model_name = tsdata->name;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
/* see what we find if we assume it is a M06 *
* if we get less than EDT_NAME_LEN, we don't want
* to have garbage in there
*/
memset(rdbuf, 0, sizeof(rdbuf));
error = edt_ft5x06_ts_readwrite(client, 1, "\xBB",
EDT_NAME_LEN - 1, rdbuf);
if (error)
return error;
/* Probe content for something consistent.
* M06 starts with a response byte, M12 gives the data directly.
* M09/Generic does not provide model number information.
*/
if (!strncasecmp(rdbuf + 1, "EP0", 3)) {
printk("vvvv wyb 2024/4/3 19:57 %s %s %d EP0 EDT_M06\n", __FILE__, __FUNCTION__, __LINE__);
tsdata->version = EDT_M06;
/* remove last '$' end marker */
rdbuf[EDT_NAME_LEN - 1] = '\0';
if (rdbuf[EDT_NAME_LEN - 2] == '$')
rdbuf[EDT_NAME_LEN - 2] = '\0';
/* look for Model/Version separator */
p = strchr(rdbuf, '*');
if (p)
*p++ = '\0';
strlcpy(model_name, rdbuf + 1, EDT_NAME_LEN);
strlcpy(fw_version, p ? p : "", EDT_NAME_LEN);
} else if (!strncasecmp(rdbuf, "EP0", 3)) {
printk("vvvv wyb 2024/4/3 19:57 %s %s %d EP0 EDT_M12\n", __FILE__, __FUNCTION__, __LINE__);
tsdata->version = EDT_M12;
/* remove last '$' end marker */
rdbuf[EDT_NAME_LEN - 2] = '\0';
if (rdbuf[EDT_NAME_LEN - 3] == '$')
rdbuf[EDT_NAME_LEN - 3] = '\0';
/* look for Model/Version separator */
p = strchr(rdbuf, '*');
if (p)
*p++ = '\0';
strlcpy(model_name, rdbuf, EDT_NAME_LEN);
strlcpy(fw_version, p ? p : "", EDT_NAME_LEN);
} else {
printk("vvvv wyb 2024/4/3 19:57 %s %s %d GENERIC_FT else\n", __FILE__, __FUNCTION__, __LINE__);
/* If it is not an EDT M06/M12 touchscreen, then the model
* detection is a bit hairy. The different ft5x06
* firmares around don't reliably implement the
* identification registers. Well, we'll take a shot.
*
* The main difference between generic focaltec based
* touches and EDT M09 is that we know how to retrieve
* the max coordinates for the latter.
*/
tsdata->version = GENERIC_FT;
error = edt_ft5x06_ts_readwrite(client, 1, "\xA6",
2, rdbuf);
if (error)
return error;
strlcpy(fw_version, rdbuf, 2);
error = edt_ft5x06_ts_readwrite(client, 1, "\xA8",
1, rdbuf);
if (error)
return error;
printk("vvvv wyb 2024/4/3 19:57 %s %s %d generic ft5x06 rdbuf[0]=0x%02x\n", __FILE__, __FUNCTION__, __LINE__, rdbuf[0]);
/* This "model identification" is not exact. Unfortunately
* not all firmwares for the ft5x06 put useful values in
* the identification registers.
*/
switch (rdbuf[0]) {
case 0x35: /* EDT EP0350M09 */
case 0x43: /* EDT EP0430M09 */
case 0x50: /* EDT EP0500M09 */
case 0x57: /* EDT EP0570M09 */
case 0x70: /* EDT EP0700M09 */
tsdata->version = EDT_M09;
snprintf(model_name, EDT_NAME_LEN, "EP0%i%i0M09",
rdbuf[0] >> 4, rdbuf[0] & 0x0F);
break;
case 0xa1: /* EDT EP1010ML00 */
tsdata->version = EDT_M09;
snprintf(model_name, EDT_NAME_LEN, "EP%i%i0ML00",
rdbuf[0] >> 4, rdbuf[0] & 0x0F);
break;
case 0x5a: /* Solomon Goldentek Display */
snprintf(model_name, EDT_NAME_LEN, "GKTW50SCED1R0");
break;
case 0x59: /* Evervision Display with FT5xx6 TS */
tsdata->version = EV_FT;
error = edt_ft5x06_ts_readwrite(client, 1, "\x53",
1, rdbuf);
if (error)
return error;
strlcpy(fw_version, rdbuf, 1);
snprintf(model_name, EDT_NAME_LEN,
"EVERVISION-FT5726NEi");
break;
default:
printk("vvvv wyb 2024/4/3 19:57 %s %s %d generic ft5x06\n", __FILE__, __FUNCTION__, __LINE__);
snprintf(model_name, EDT_NAME_LEN,
"generic ft5x06 (%02x)",
rdbuf[0]);
break;
}
}
return 0;
}
static void edt_ft5x06_ts_get_defaults(struct device *dev,
struct edt_ft5x06_ts_data *tsdata)
{
struct edt_reg_addr *reg_addr = &tsdata->reg_addr;
u32 val;
int error;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
error = device_property_read_u32(dev, "threshold", &val);
if (!error) {
edt_ft5x06_register_write(tsdata, reg_addr->reg_threshold, val);
tsdata->threshold = val;
}
error = device_property_read_u32(dev, "gain", &val);
if (!error) {
edt_ft5x06_register_write(tsdata, reg_addr->reg_gain, val);
tsdata->gain = val;
}
error = device_property_read_u32(dev, "offset", &val);
if (!error) {
if (reg_addr->reg_offset != NO_REGISTER)
edt_ft5x06_register_write(tsdata,
reg_addr->reg_offset, val);
tsdata->offset = val;
}
error = device_property_read_u32(dev, "offset-x", &val);
if (!error) {
if (reg_addr->reg_offset_x != NO_REGISTER)
edt_ft5x06_register_write(tsdata,
reg_addr->reg_offset_x, val);
tsdata->offset_x = val;
}
error = device_property_read_u32(dev, "offset-y", &val);
if (!error) {
if (reg_addr->reg_offset_y != NO_REGISTER)
edt_ft5x06_register_write(tsdata,
reg_addr->reg_offset_y, val);
tsdata->offset_y = val;
}
}
static void
edt_ft5x06_ts_get_parameters(struct edt_ft5x06_ts_data *tsdata)
{
struct edt_reg_addr *reg_addr = &tsdata->reg_addr;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
tsdata->threshold = edt_ft5x06_register_read(tsdata,
reg_addr->reg_threshold);
tsdata->gain = edt_ft5x06_register_read(tsdata, reg_addr->reg_gain);
if (reg_addr->reg_offset != NO_REGISTER)
tsdata->offset =
edt_ft5x06_register_read(tsdata, reg_addr->reg_offset);
if (reg_addr->reg_offset_x != NO_REGISTER)
tsdata->offset_x = edt_ft5x06_register_read(tsdata,
reg_addr->reg_offset_x);
if (reg_addr->reg_offset_y != NO_REGISTER)
tsdata->offset_y = edt_ft5x06_register_read(tsdata,
reg_addr->reg_offset_y);
if (reg_addr->reg_report_rate != NO_REGISTER)
tsdata->report_rate = edt_ft5x06_register_read(tsdata,
reg_addr->reg_report_rate);
if (tsdata->version == EDT_M06 ||
tsdata->version == EDT_M09 ||
tsdata->version == EDT_M12) {
tsdata->num_x = edt_ft5x06_register_read(tsdata,
reg_addr->reg_num_x);
tsdata->num_y = edt_ft5x06_register_read(tsdata,
reg_addr->reg_num_y);
} else {
tsdata->num_x = -1;
tsdata->num_y = -1;
}
}
static void
edt_ft5x06_ts_set_regs(struct edt_ft5x06_ts_data *tsdata)
{
struct edt_reg_addr *reg_addr = &tsdata->reg_addr;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
switch (tsdata->version) {
case EDT_M06:
reg_addr->reg_threshold = WORK_REGISTER_THRESHOLD;
reg_addr->reg_report_rate = WORK_REGISTER_REPORT_RATE;
reg_addr->reg_gain = WORK_REGISTER_GAIN;
reg_addr->reg_offset = WORK_REGISTER_OFFSET;
reg_addr->reg_offset_x = NO_REGISTER;
reg_addr->reg_offset_y = NO_REGISTER;
reg_addr->reg_num_x = WORK_REGISTER_NUM_X;
reg_addr->reg_num_y = WORK_REGISTER_NUM_Y;
break;
case EDT_M09:
case EDT_M12:
reg_addr->reg_threshold = M09_REGISTER_THRESHOLD;
reg_addr->reg_report_rate = NO_REGISTER;
reg_addr->reg_gain = M09_REGISTER_GAIN;
reg_addr->reg_offset = M09_REGISTER_OFFSET;
reg_addr->reg_offset_x = NO_REGISTER;
reg_addr->reg_offset_y = NO_REGISTER;
reg_addr->reg_num_x = M09_REGISTER_NUM_X;
reg_addr->reg_num_y = M09_REGISTER_NUM_Y;
break;
case EV_FT:
reg_addr->reg_threshold = EV_REGISTER_THRESHOLD;
reg_addr->reg_gain = EV_REGISTER_GAIN;
reg_addr->reg_offset = NO_REGISTER;
reg_addr->reg_offset_x = EV_REGISTER_OFFSET_X;
reg_addr->reg_offset_y = EV_REGISTER_OFFSET_Y;
reg_addr->reg_num_x = NO_REGISTER;
reg_addr->reg_num_y = NO_REGISTER;
reg_addr->reg_report_rate = NO_REGISTER;
break;
case GENERIC_FT:
/* this is a guesswork */
reg_addr->reg_threshold = M09_REGISTER_THRESHOLD;
reg_addr->reg_gain = M09_REGISTER_GAIN;
reg_addr->reg_offset = M09_REGISTER_OFFSET;
reg_addr->reg_offset_x = NO_REGISTER;
reg_addr->reg_offset_y = NO_REGISTER;
break;
}
}
static void edt_ft5x06_disable_regulator(void *arg)
{
struct edt_ft5x06_ts_data *data = arg;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
regulator_disable(data->vcc);
}
#include <linux/of_gpio.h>
static int edt_ft5x06_ts_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
const struct edt_i2c_chip_data *chip_data;
struct edt_ft5x06_ts_data *tsdata;
u8 buf[2] = { 0xfc, 0x00 };
struct input_dev *input;
unsigned long irq_flags;
int error;
char fw_version[EDT_NAME_LEN];
int i = 0;
int j = 0;
u8 rd256buf[256];
u8 rdbuf[EDT_NAME_LEN];
memset(rdbuf, 0, sizeof(rdbuf));
memset(rdbuf, 0, sizeof(rd256buf));
dev_dbg(&client->dev, "probing for EDT FT5x06 I2C\n");
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 1\n", __FILE__, __FUNCTION__, __LINE__);
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 2\n", __FILE__, __FUNCTION__, __LINE__);
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 3\n", __FILE__, __FUNCTION__, __LINE__);
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 4\n", __FILE__, __FUNCTION__, __LINE__);
//
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 5\n", __FILE__, __FUNCTION__, __LINE__);
//
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 6\n", __FILE__, __FUNCTION__, __LINE__);
//
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 7\n", __FILE__, __FUNCTION__, __LINE__);
//
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 8\n", __FILE__, __FUNCTION__, __LINE__);
//
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 9\n", __FILE__, __FUNCTION__, __LINE__);
//
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 10\n", __FILE__, __FUNCTION__, __LINE__);
printk("**** 2025/1/22 18:52 wyb %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
// 2025/1/22 17:35 wenyuanbo GPIO 2C5 Backlight low
// gpiod_direction_output(85, 0);
msleep(20);
//gpio_direction_output(120, 1);
gpio_direction_output(85, 1);
//gpio_direction_output(85, 0);
usleep_range(1000, 2000);
printk("**** 2025/1/22 18:12 wyb %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 11\n", __FILE__, __FUNCTION__, __LINE__);
//
//mdelay(1000);
//printk("**** wyb 2024/12/6 10:19 %s %s %d 12\n", __FILE__, __FUNCTION__, __LINE__);
tsdata = devm_kzalloc(&client->dev, sizeof(*tsdata), GFP_KERNEL);
if (!tsdata) {
dev_err(&client->dev, "failed to allocate driver data.\n");
return -ENOMEM;
}
// 2025/8/14 19:15 init ERROR!!!!
//error = edt_ft5x06_ts_readwrite(client, 1, "\xBB",
// EDT_NAME_LEN - 1, rdbuf);
//if (error)
// return error;
// error = edt_ft5x06_ts_readwrite(client, 1, "\xBB", 256, rd256buf);
// if (error)
// return error;
//
// //printk(" 00 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[0], rdbuf[1], rdbuf[2], rdbuf[3], rdbuf[4], rdbuf[5], rdbuf[6], rdbuf[7], rdbuf[8], rdbuf[9]);
// //printk(" 10 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[10], rdbuf[11], rdbuf[12], rdbuf[13], rdbuf[14], rdbuf[15], rdbuf[16], rdbuf[17], rdbuf[18], rdbuf[19]);
// //printk(" 20 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[20], rdbuf[21], rdbuf[22], rdbuf[23], rdbuf[24], rdbuf[25], rdbuf[26], rdbuf[27], rdbuf[28], rdbuf[29]);
// //printk(" 30 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[30], rdbuf[31], rdbuf[32], rdbuf[33], rdbuf[34], rdbuf[35], rdbuf[36], rdbuf[37], rdbuf[38], rdbuf[39]);
// //printk(" 40 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[40], rdbuf[41], rdbuf[42], rdbuf[43], rdbuf[44], rdbuf[45], rdbuf[46], rdbuf[47], rdbuf[48], rdbuf[49]);
// //printk(" 50 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[50], rdbuf[51], rdbuf[52], rdbuf[53], rdbuf[54], rdbuf[55], rdbuf[56], rdbuf[57], rdbuf[58], rdbuf[59]);
// ////printk(" 60 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[60], rdbuf[61], rdbuf[62]);
// //
// //printk(" 60 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[60], rdbuf[61], rdbuf[62], rdbuf[63], rdbuf[64], rdbuf[66], rdbuf[66], rdbuf[67], rdbuf[68], rdbuf[69]);
// //printk(" 70 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[70], rdbuf[71], rdbuf[72], rdbuf[73], rdbuf[74], rdbuf[77], rdbuf[77], rdbuf[77], rdbuf[78], rdbuf[79]);
//
// for(i=0; i<16; i++)
// {
// //printk(" 00 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[0], rdbuf[1], rdbuf[2], rdbuf[3], rdbuf[4], rdbuf[5], rdbuf[6], rdbuf[7], rdbuf[8], rdbuf[9]);
// printk("i=%02d 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rd256buf[i*16+0], rd256buf[i*16+1], rd256buf[i*16+2], rd256buf[i*16+3], rd256buf[i*16+4], rd256buf[i*16+5], rd256buf[i*16+6], rd256buf[i*16+7], rd256buf[i*16+8], rd256buf[i*16+9], rd256buf[i*16+10], rd256buf[i*16+11], rd256buf[i*16+12], rd256buf[i*16+13], rd256buf[i*16+14], rd256buf[i*16+15]);
// //printk("%02d ", i);
// //
// //for(j=0; j<16; j++)
// //{
// // printk("%02X ", i*16+j);
// //}
// }
tsdata->pinctrl = devm_pinctrl_get(&client->dev);
if (!IS_ERR(tsdata->pinctrl)) {
tsdata->pins_default = pinctrl_lookup_state(tsdata->pinctrl, "ft5x06_defaults");
if (IS_ERR(tsdata->pins_default))
dev_err(&client->dev, "could not get default pinstate\n");
if (!IS_ERR_OR_NULL(tsdata->pins_default)) {
error = pinctrl_select_state(tsdata->pinctrl,
tsdata->pins_default);
if (error < 0)
dev_err(&client->dev, "could not set pins\n");
}
}
chip_data = device_get_match_data(&client->dev);
if (!chip_data)
chip_data = (const struct edt_i2c_chip_data *)id->driver_data;
if (!chip_data || !chip_data->max_support_points) {
dev_err(&client->dev, "invalid or missing chip data\n");
return -EINVAL;
}
tsdata->max_support_points = chip_data->max_support_points;
printk("**** wyb 2024/12/6 10:19 %s %s %d 12 chip_data->max_support_points = %d \n", __FILE__, __FUNCTION__, __LINE__, chip_data->max_support_points);
tsdata->vcc = devm_regulator_get(&client->dev, "vcc");
if (IS_ERR(tsdata->vcc)) {
error = PTR_ERR(tsdata->vcc);
if (error != -EPROBE_DEFER)
dev_err(&client->dev,
"failed to request regulator: %d\n", error);
return error;
}
error = regulator_enable(tsdata->vcc);
if (error < 0) {
dev_err(&client->dev, "failed to enable vcc: %d\n", error);
return error;
}
error = devm_add_action_or_reset(&client->dev,
edt_ft5x06_disable_regulator,
tsdata);
if (error)
return error;
tsdata->reset_gpio = devm_gpiod_get_optional(&client->dev,
"reset", GPIOD_OUT_HIGH);
if (IS_ERR(tsdata->reset_gpio)) {
error = PTR_ERR(tsdata->reset_gpio);
dev_err(&client->dev,
"Failed to request GPIO reset pin, error %d\n", error);
return error;
}
tsdata->wake_gpio = devm_gpiod_get_optional(&client->dev,
"wake", GPIOD_OUT_LOW);
if (IS_ERR(tsdata->wake_gpio)) {
error = PTR_ERR(tsdata->wake_gpio);
dev_err(&client->dev,
"Failed to request GPIO wake pin, error %d\n", error);
return error;
}
/*
* Check which sleep modes we can support. Power-off requieres the
* reset-pin to ensure correct power-down/power-up behaviour. Start with
* the EDT_PMODE_POWEROFF test since this is the deepest possible sleep
* mode.
*/
if (tsdata->reset_gpio)
tsdata->suspend_mode = EDT_PMODE_POWEROFF;
else if (tsdata->wake_gpio)
tsdata->suspend_mode = EDT_PMODE_HIBERNATE;
else
tsdata->suspend_mode = EDT_PMODE_NOT_SUPPORTED;
if (tsdata->wake_gpio) {
usleep_range(5000, 6000);
gpiod_set_value_cansleep(tsdata->wake_gpio, 1);
}
//printk("**** wyb 2024/4/3 19:57 %s %s %d tsdata->reset_gpio=%d\n", __FILE__, __FUNCTION__, __LINE__, tsdata->reset_gpio);
printk("vvvv wyb 2024/4/3 19:57 %s %s %d tsdata->reset_gpio=%d\n", __FILE__, __FUNCTION__, __LINE__, tsdata->reset_gpio ? desc_to_gpio(tsdata->reset_gpio) : -1);
// // 设置 reset GPIO 为输出,并拉低 5ms 后拉高
// // 这是一个复位操作,用于初始化 ft5x06 设备
// gpiod_direction_output(reset_gpio, 0);
// msleep(5);
// gpiod_direction_output(reset_gpio, 1);
//gpiod_direction_output(14, 0);
//msleep(5);
//gpiod_direction_output(14, 1);
gpiod_direction_output(tsdata->reset_gpio, 0);
msleep(5);
gpiod_direction_output(tsdata->reset_gpio, 1);
printk("**** wyb 2024/4/3 19:57 %s %s %d reset_gpio tsdata->reset_gpio\n", __FILE__, __FUNCTION__, __LINE__);
if (tsdata->reset_gpio) {
usleep_range(5000, 6000);
gpiod_set_value_cansleep(tsdata->reset_gpio, 0);
msleep(300);
}
input = devm_input_allocate_device(&client->dev);
if (!input) {
dev_err(&client->dev, "failed to allocate input device.\n");
return -ENOMEM;
}
mutex_init(&tsdata->mutex);
tsdata->client = client;
tsdata->input = input;
tsdata->factory_mode = false;
error = edt_ft5x06_ts_identify(client, tsdata, fw_version);
if (error) {
dev_err(&client->dev, "touchscreen probe failed\n");
return error;
}
/*
* Dummy read access. EP0700MLP1 returns bogus data on the first
* register read access and ignores writes.
*/
edt_ft5x06_ts_readwrite(tsdata->client, 2, buf, 2, buf);
edt_ft5x06_ts_set_regs(tsdata);
edt_ft5x06_ts_get_defaults(&client->dev, tsdata);
edt_ft5x06_ts_get_parameters(tsdata);
dev_dbg(&client->dev,
"Model \"%s\", Rev. \"%s\", %dx%d sensors\n",
tsdata->name, fw_version, tsdata->num_x, tsdata->num_y);
printk("vvvv 2024/4/3 19:57 %s %s %d Model \"%s\", Rev. \"%s\", %dx%d sensors\n", __FILE__, __FUNCTION__, __LINE__, tsdata->name, fw_version, tsdata->num_x, tsdata->num_y);
input->name = tsdata->name;
input->id.bustype = BUS_I2C;
input->dev.parent = &client->dev;
if (tsdata->version == EDT_M06 ||
tsdata->version == EDT_M09 ||
tsdata->version == EDT_M12) {
input_set_abs_params(input, ABS_MT_POSITION_X,
0, tsdata->num_x * 64 - 1, 0, 0);
input_set_abs_params(input, ABS_MT_POSITION_Y,
0, tsdata->num_y * 64 - 1, 0, 0);
} else {
/* Unknown maximum values. Specify via devicetree */
input_set_abs_params(input, ABS_MT_POSITION_X,
0, 65535, 0, 0);
input_set_abs_params(input, ABS_MT_POSITION_Y,
0, 65535, 0, 0);
}
touchscreen_parse_properties(input, true, &tsdata->prop);
error = input_mt_init_slots(input, tsdata->max_support_points,
INPUT_MT_DIRECT);
if (error) {
dev_err(&client->dev, "Unable to init MT slots.\n");
return error;
}
i2c_set_clientdata(client, tsdata);
irq_flags = irq_get_trigger_type(client->irq);
if (irq_flags == IRQF_TRIGGER_NONE)
irq_flags = IRQF_TRIGGER_FALLING;
irq_flags |= IRQF_ONESHOT;
tsdata->int_gpio = devm_gpiod_get_optional(&client->dev,
"irq", GPIOD_OUT_HIGH);
if(IS_ERR(tsdata->int_gpio)){
error = PTR_ERR(tsdata->int_gpio);
dev_err(&client->dev, "Failed to request int gpio %d\n", error);
} else {
client->irq = gpiod_to_irq(tsdata->int_gpio);
irq_flags = IRQF_TRIGGER_FALLING | IRQF_ONESHOT;
}
printk("vvvv wyb 2024/4/3 19:57 %s %s %d tsdata->int_gpio=%d\n", __FILE__, __FUNCTION__, __LINE__, tsdata->int_gpio ? desc_to_gpio(tsdata->int_gpio) : -1);
error = devm_request_threaded_irq(&client->dev, client->irq,
NULL, edt_ft5x06_ts_isr, irq_flags,
client->name, tsdata);
if (error) {
dev_err(&client->dev, "Unable to request touchscreen IRQ.\n");
return error;
}
error = devm_device_add_group(&client->dev, &edt_ft5x06_attr_group);
if (error)
return error;
error = input_register_device(input);
if (error)
return error;
edt_ft5x06_ts_prepare_debugfs(tsdata, dev_driver_string(&client->dev));
dev_dbg(&client->dev,
"EDT FT5x06 initialized: IRQ %d, WAKE pin %d, Reset pin %d.\n",
client->irq,
tsdata->wake_gpio ? desc_to_gpio(tsdata->wake_gpio) : -1,
tsdata->reset_gpio ? desc_to_gpio(tsdata->reset_gpio) : -1);
printk("#### wyb 2024/4/3 19:57 %s %s %d EDT FT5x06 initialized: IRQ %d, WAKE pin %d, Reset pin %d.\n", __FILE__, __FUNCTION__, __LINE__,
client->irq,
tsdata->wake_gpio ? desc_to_gpio(tsdata->wake_gpio) : -1,
tsdata->reset_gpio ? desc_to_gpio(tsdata->reset_gpio) : -1);
printk("---- wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
error = edt_ft5x06_ts_readwrite(client, 1, "\xBB", 256, rd256buf);
if (error)
return error;
//printk(" 00 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[0], rdbuf[1], rdbuf[2], rdbuf[3], rdbuf[4], rdbuf[5], rdbuf[6], rdbuf[7], rdbuf[8], rdbuf[9]);
//printk(" 10 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[10], rdbuf[11], rdbuf[12], rdbuf[13], rdbuf[14], rdbuf[15], rdbuf[16], rdbuf[17], rdbuf[18], rdbuf[19]);
//printk(" 20 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[20], rdbuf[21], rdbuf[22], rdbuf[23], rdbuf[24], rdbuf[25], rdbuf[26], rdbuf[27], rdbuf[28], rdbuf[29]);
//printk(" 30 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[30], rdbuf[31], rdbuf[32], rdbuf[33], rdbuf[34], rdbuf[35], rdbuf[36], rdbuf[37], rdbuf[38], rdbuf[39]);
//printk(" 40 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[40], rdbuf[41], rdbuf[42], rdbuf[43], rdbuf[44], rdbuf[45], rdbuf[46], rdbuf[47], rdbuf[48], rdbuf[49]);
//printk(" 50 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[50], rdbuf[51], rdbuf[52], rdbuf[53], rdbuf[54], rdbuf[55], rdbuf[56], rdbuf[57], rdbuf[58], rdbuf[59]);
////printk(" 60 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[60], rdbuf[61], rdbuf[62]);
//
//printk(" 60 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[60], rdbuf[61], rdbuf[62], rdbuf[63], rdbuf[64], rdbuf[66], rdbuf[66], rdbuf[67], rdbuf[68], rdbuf[69]);
//printk(" 70 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[70], rdbuf[71], rdbuf[72], rdbuf[73], rdbuf[74], rdbuf[77], rdbuf[77], rdbuf[77], rdbuf[78], rdbuf[79]);
for(i=0; i<16; i++)
{
//printk(" 00 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", rdbuf[0], rdbuf[1], rdbuf[2], rdbuf[3], rdbuf[4], rdbuf[5], rdbuf[6], rdbuf[7], rdbuf[8], rdbuf[9]);
printk("i=%02d 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, 0x%02x, \n", i, rd256buf[i*16+0], rd256buf[i*16+1], rd256buf[i*16+2], rd256buf[i*16+3], rd256buf[i*16+4], rd256buf[i*16+5], rd256buf[i*16+6], rd256buf[i*16+7], rd256buf[i*16+8], rd256buf[i*16+9], rd256buf[i*16+10], rd256buf[i*16+11], rd256buf[i*16+12], rd256buf[i*16+13], rd256buf[i*16+14], rd256buf[i*16+15]);
//printk("%02d ", i);
//
//for(j=0; j<16; j++)
//{
// printk("%02X ", i*16+j);
//}
}
return 0;
}
static int edt_ft5x06_ts_remove(struct i2c_client *client)
{
struct edt_ft5x06_ts_data *tsdata = i2c_get_clientdata(client);
edt_ft5x06_ts_teardown_debugfs(tsdata);
return 0;
}
static int __maybe_unused edt_ft5x06_ts_suspend(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct edt_ft5x06_ts_data *tsdata = i2c_get_clientdata(client);
struct gpio_desc *reset_gpio = tsdata->reset_gpio;
int ret;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
if (device_may_wakeup(dev))
return 0;
if (tsdata->suspend_mode == EDT_PMODE_NOT_SUPPORTED)
return 0;
/* Enter hibernate mode. */
ret = edt_ft5x06_register_write(tsdata, PMOD_REGISTER_OPMODE,
PMOD_REGISTER_HIBERNATE);
if (ret)
dev_warn(dev, "Failed to set hibernate mode\n");
if (tsdata->suspend_mode == EDT_PMODE_HIBERNATE)
return 0;
/*
* Power-off according the datasheet. Cut the power may leaf the irq
* line in an undefined state depending on the host pull resistor
* settings. Disable the irq to avoid adjusting each host till the
* device is back in a full functional state.
*/
disable_irq(tsdata->client->irq);
gpiod_set_value_cansleep(reset_gpio, 1);
usleep_range(1000, 2000);
ret = regulator_disable(tsdata->vcc);
if (ret)
dev_warn(dev, "Failed to disable vcc\n");
return 0;
}
static int __maybe_unused edt_ft5x06_ts_resume(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct edt_ft5x06_ts_data *tsdata = i2c_get_clientdata(client);
int ret = 0;
printk("**** wyb 2024/4/3 19:57 %s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
if (device_may_wakeup(dev))
return 0;
if (tsdata->suspend_mode == EDT_PMODE_NOT_SUPPORTED)
return 0;
if (tsdata->suspend_mode == EDT_PMODE_POWEROFF) {
struct gpio_desc *reset_gpio = tsdata->reset_gpio;
/*
* We can't check if the regulator is a dummy or a real
* regulator. So we need to specify the 5ms reset time (T_rst)
* here instead of the 100us T_rtp time. We also need to wait
* 300ms in case it was a real supply and the power was cutted
* of. Toggle the reset pin is also a way to exit the hibernate
* mode.
*/
gpiod_set_value_cansleep(reset_gpio, 1);
usleep_range(5000, 6000);
ret = regulator_enable(tsdata->vcc);
if (ret) {
dev_err(dev, "Failed to enable vcc\n");
return ret;
}
usleep_range(1000, 2000);
gpiod_set_value_cansleep(reset_gpio, 0);
msleep(300);
edt_ft5x06_restore_reg_parameters(tsdata);
enable_irq(tsdata->client->irq);
if (tsdata->factory_mode)
ret = edt_ft5x06_factory_mode(tsdata);
} else {
struct gpio_desc *wake_gpio = tsdata->wake_gpio;
gpiod_set_value_cansleep(wake_gpio, 0);
usleep_range(5000, 6000);
gpiod_set_value_cansleep(wake_gpio, 1);
}
return ret;
}
static SIMPLE_DEV_PM_OPS(edt_ft5x06_ts_pm_ops,
edt_ft5x06_ts_suspend, edt_ft5x06_ts_resume);
static const struct edt_i2c_chip_data edt_ft5x06_data = {
//.max_support_points = 5,
.max_support_points = 10,
};
static const struct edt_i2c_chip_data edt_ft5506_data = {
.max_support_points = 10,
};
static const struct edt_i2c_chip_data edt_ft6236_data = {
//.max_support_points = 2,
.max_support_points = 10,
};
static const struct i2c_device_id edt_ft5x06_ts_id[] = {
{ .name = "edt-ft5x06", .driver_data = (long)&edt_ft5x06_data },
{ .name = "edt-ft5506", .driver_data = (long)&edt_ft5506_data },
{ .name = "ev-ft5726", .driver_data = (long)&edt_ft5506_data },
/* Note no edt- prefix for compatibility with the ft6236.c driver */
{ .name = "ft6236", .driver_data = (long)&edt_ft6236_data },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(i2c, edt_ft5x06_ts_id);
static const struct of_device_id edt_ft5x06_of_match[] = {
{ .compatible = "edt,edt-ft5206", .data = &edt_ft5x06_data },
{ .compatible = "edt,edt-ft5306", .data = &edt_ft5x06_data },
{ .compatible = "edt,edt-ft5406", .data = &edt_ft5x06_data },
{ .compatible = "edt,edt-ft5506", .data = &edt_ft5506_data },
{ .compatible = "evervision,ev-ft5726", .data = &edt_ft5506_data },
/* Note focaltech vendor prefix for compatibility with ft6236.c */
{ .compatible = "focaltech,ft6236", .data = &edt_ft6236_data },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, edt_ft5x06_of_match);
static struct i2c_driver edt_ft5x06_ts_driver = {
.driver = {
.name = "edt_ft5x06",
.of_match_table = edt_ft5x06_of_match,
.pm = &edt_ft5x06_ts_pm_ops,
.probe_type = PROBE_PREFER_ASYNCHRONOUS,
},
.id_table = edt_ft5x06_ts_id,
.probe = edt_ft5x06_ts_probe,
.remove = edt_ft5x06_ts_remove,
};
module_i2c_driver(edt_ft5x06_ts_driver);
MODULE_AUTHOR("Simon Budig <simon.budig@kernelconcepts.de>");
MODULE_DESCRIPTION("EDT FT5x06 I2C Touchscreen Driver");
MODULE_LICENSE("GPL v2");
十点触控的效果图: