思考:高速场景的行星轮混动效率如何理解
行星轮混动
E-CVT(电子无级变速器)是一种专为混合动力汽车设计的动力分配系统,其核心原理是通过行星齿轮组和电机的协同工作,实现动力分流与无级变速。
一、核心结构与组成
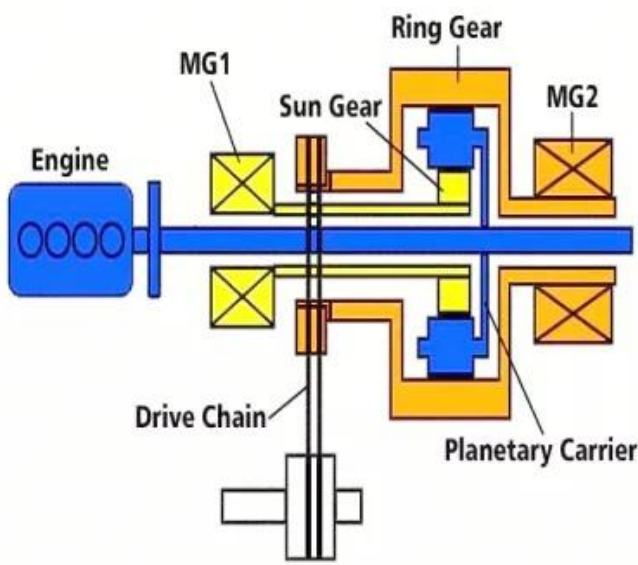
E-CVT的核心部件包括 行星齿轮组 和 双电机(发电机MG1、驱动电机MG2),部分系统还集成电控单元(ECU)和离合器:
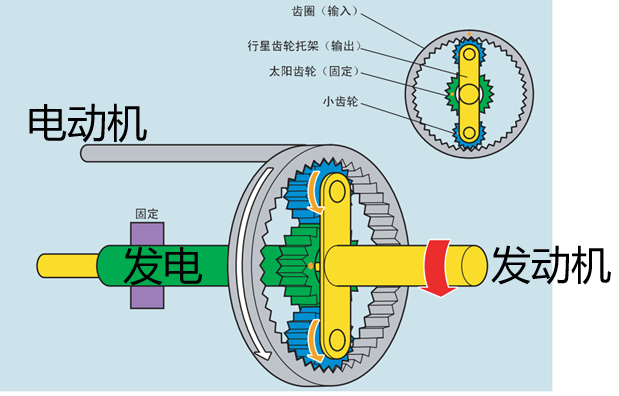
- 行星齿轮组:
- 太阳轮:连接发电机MG1,负责调节转速和发电。
- 行星架:连接发动机,输入机械动力。
- 齿圈:连接驱动电机MG2和车轮,输出动力。
- 双电机:
- MG1:发电或驱动太阳轮,调节发动机转速。
- MG2:直接驱动车轮或辅助动力。
- 电控系统:实时协调发动机、电机的工况,优化动力分配。
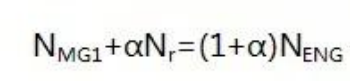
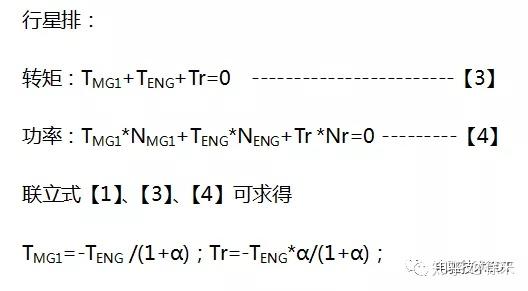
三个转速关系:
齿圈驱动车轮,输出动力
二、工作原理:动力分流与无级变速
E-CVT通过行星齿轮组的转速耦合实现动力分流,而非传统CVT的机械变速。其核心逻辑是 将发动机动力拆分为机械路径和电驱路径,通过电机调节实现转速匹配:
- 动力分流模式:
- 机械路径:发动机通过行星架直接驱动齿圈(部分动力传递至车轮)。
- 电驱路径:发动机驱动太阳轮带动MG1发电,电能供给MG2或电池,再由MG2驱动齿圈。
- 无级变速机制:
- 通过调节MG1的转速,改变太阳轮与行星架的转速差,从而间接控制齿圈(车轮)的转速。
- 例如:车速增加时,MG1提升太阳轮转速,使发动机保持高效区间(如2000rpm),无需传统换挡动作。
三、典型工况下的动力流向
E-CVT根据不同驾驶场景动态调整动力分配:
- 纯电模式(低速起步):
- 动力路径:电池→MG2→齿圈→车轮。
- 特点:发动机不工作,MG1空转,零油耗且静谧。
- 混动模式(中速加速):
- 动力路径:发动机→行星架→太阳轮→MG1发电→电池→MG2→齿圈。
- 特点:发动机与电机协同驱动,发动机始终工作在高效区间。
- 直驱模式(高速巡航):
- 动力路径:发动机→行星架→齿圈→车轮(机械直驱为主)。
- 特点:MG1调节转速,避免发动机高负荷运转。
- 能量回收模式(减速/制动):
- 动力路径:车轮→齿圈→MG2(反转发电)→电池。
- 特点:动能转化为电能,提升续航。
四、高速能耗分析
高速
在高速时,行星轮系统存在电功率循环,导致传动效率下降,油耗增加。
在高速行驶时,为了维持行星轮的力矩平衡:
1、假设整车在高速时的需求扭矩在120Nm至240Nm之间,通过固定传动比,可算出对应齿圈上的需求扭矩在30Nm至60Nm之间。
2、假设当发动机工作在2500rpm至3500rpm区间时,最优的输出扭矩为90Nm左右。发动机在高速时作为整车的主要输出,其扭矩为正。
通过公式,那么MG1的扭矩必定为负数,即MG1处于放电状态,消耗电池包的能源。
-
齿圈Tr驱动力如果大于车辆需求扭矩(发动机输出到齿圈的扭矩一直大于齿圈的需求扭矩的话)此时MG2也是负扭矩,MG2处于发电状态,发电为了维持系统扭矩平衡。
-
(当然,也可能MG2是正扭矩,看工况,消耗电池包的能源)
-
MG2直接驱动车轮或回收制动能量。当MG1反转耗电、MG2发电时,电能会在MG1→电池→MG2之间循环,形成“功率环流”,导致路径损耗(逆变器、电机效率损失叠加)
MG1反转引起的电功率循环损失本质与MG1正转时功率分流的机电路径电气损耗没有区别,是同一回事。 -
当MG1正转发电的时候,通过机电路径传递的功率永远小于等于发动机的总功率,也就是说此时机电路径传递能量的损失是相对较小的。
-
当MG1开始反转耗电,MG2发电,因为行星齿轮的转速耦合特性(若发动机(行星架)转速固定,车轮转速(齿圈)提高时,MG1(太阳轮)转速必须反向增加以满足转速方程,导致其发电功率迅速上升),如果假设发动机转速不变,随着车轮转速提高(通过发动机输出的机械能需先由MG1转化为电能,再通过MG2转回机械能实现),MG1的发电量会迅速增大,很快会达到甚至超过发动机总输出功率(因此当MG1发电功率接近发动机总功率时,系统效率急剧下降,甚至可能出现“发电量超过发动机输出”的虚功现象(实际为能量循环而非净输出))。也就是说此时为了将发动机功率输出到轮端,会有一个很大的功率在机电路径循环,造成比较大的损耗。所以MG1反转这种情况,实际当中应该是尽量避免的。
如何改进?
- 当车轮转速变化时,通过调节发动机转速减少MG1的反转需求
- 仅在低速纯电模式或急加速时短暂启用MG1反转(辅助驱动),其他时间通过算法避免该状态。例如,中高速巡航时优先由发动机直接驱动,MG1正转发电补充电池
- 多模式切换:如通过离合器锁止行星齿轮部件,切断功率环流路径;DM-i则采用双电机平行轴设计,减少行星齿轮的强制转速耦合,导致了机械离合器的复杂性和磨损问题!
低速
在低速工况下,MG1为负扭矩,呈发电状态。在需求高扭矩时,MG2会协助参与输出动力。通过MG1和MG2的协调控制,使得发动机工作在最佳燃油区间。
平性轴系统
. 直驱模式+多挡位设计
平行轴混动常搭配多挡DHT(如2挡或3挡变速箱),通过挡位切换将发动机转速控制在高效区间:
- 低速挡:高速急加速时放大扭矩,避免发动机超负荷;
- 高速挡:巡航时降低转速(如120km/h时转速仅2000rpm),减少摩擦损耗。
参考
https://zhuanlan.zhihu.com/p/91866693