机械硬盘模块逻辑与工作原理
机械硬盘(HDD)的核心逻辑是将数据存储在旋转的磁性盘片上,并通过移动的磁头进行读写操作。其模块化逻辑结构可以清晰地划分为以下几个关键部分:
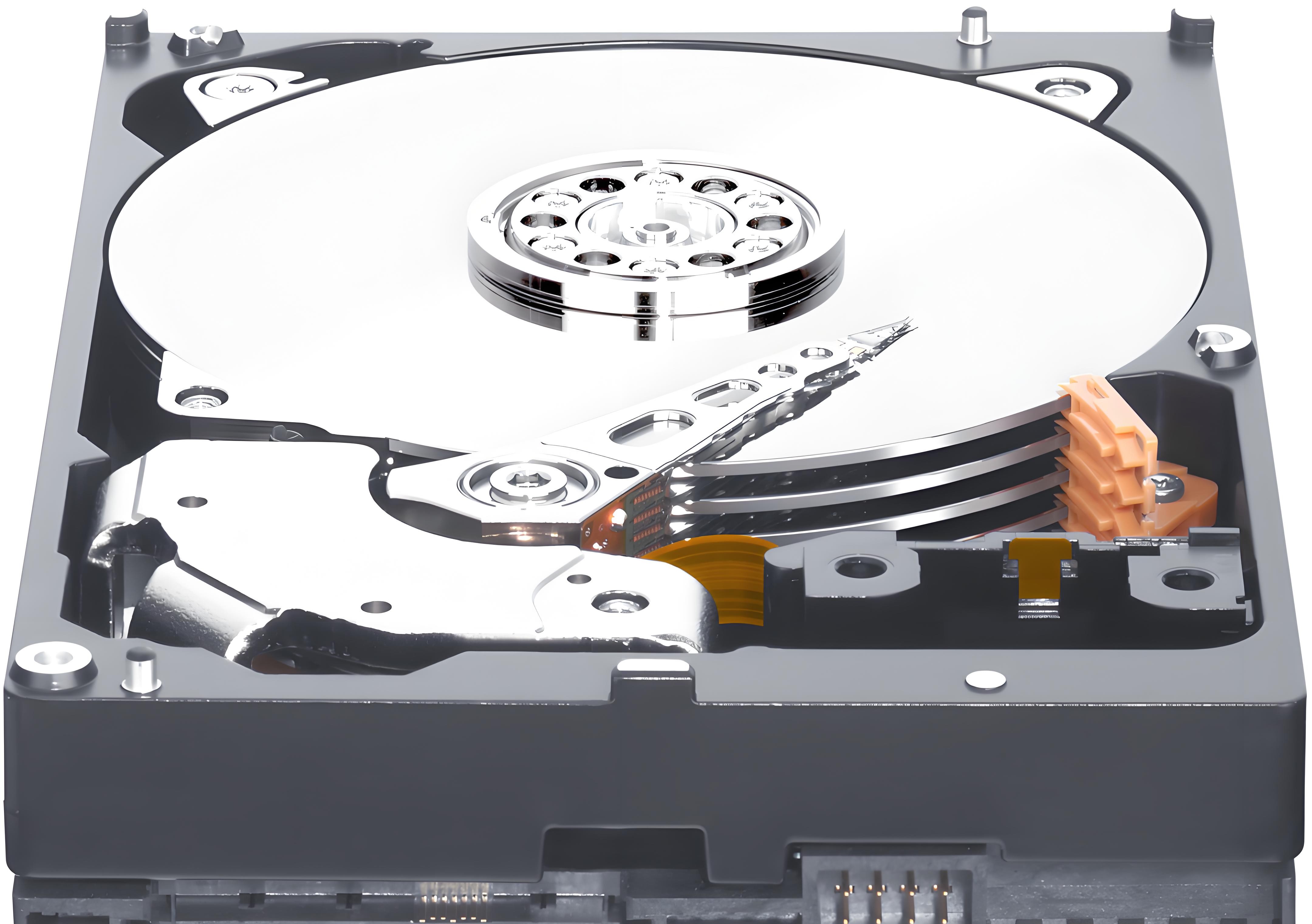
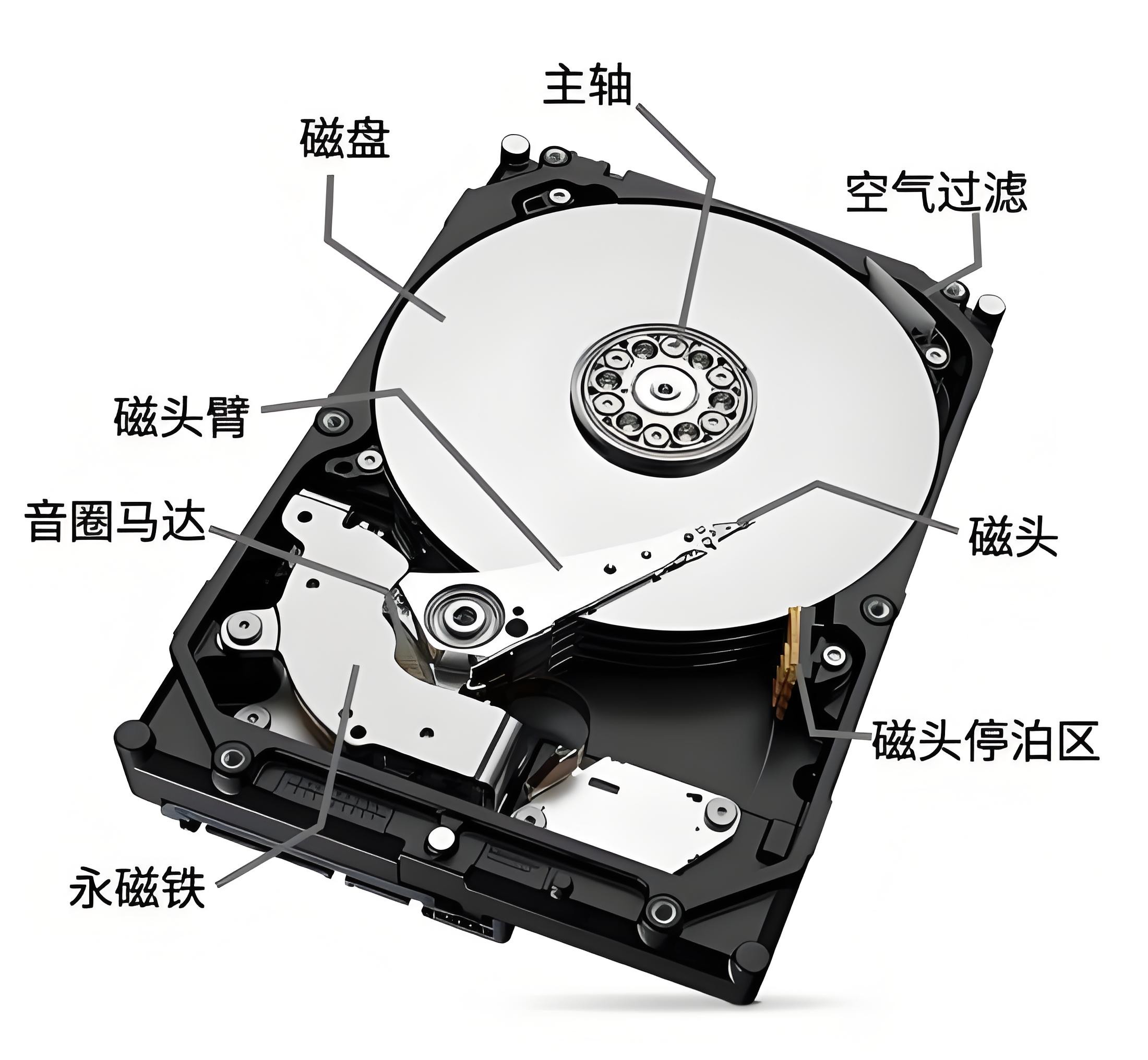
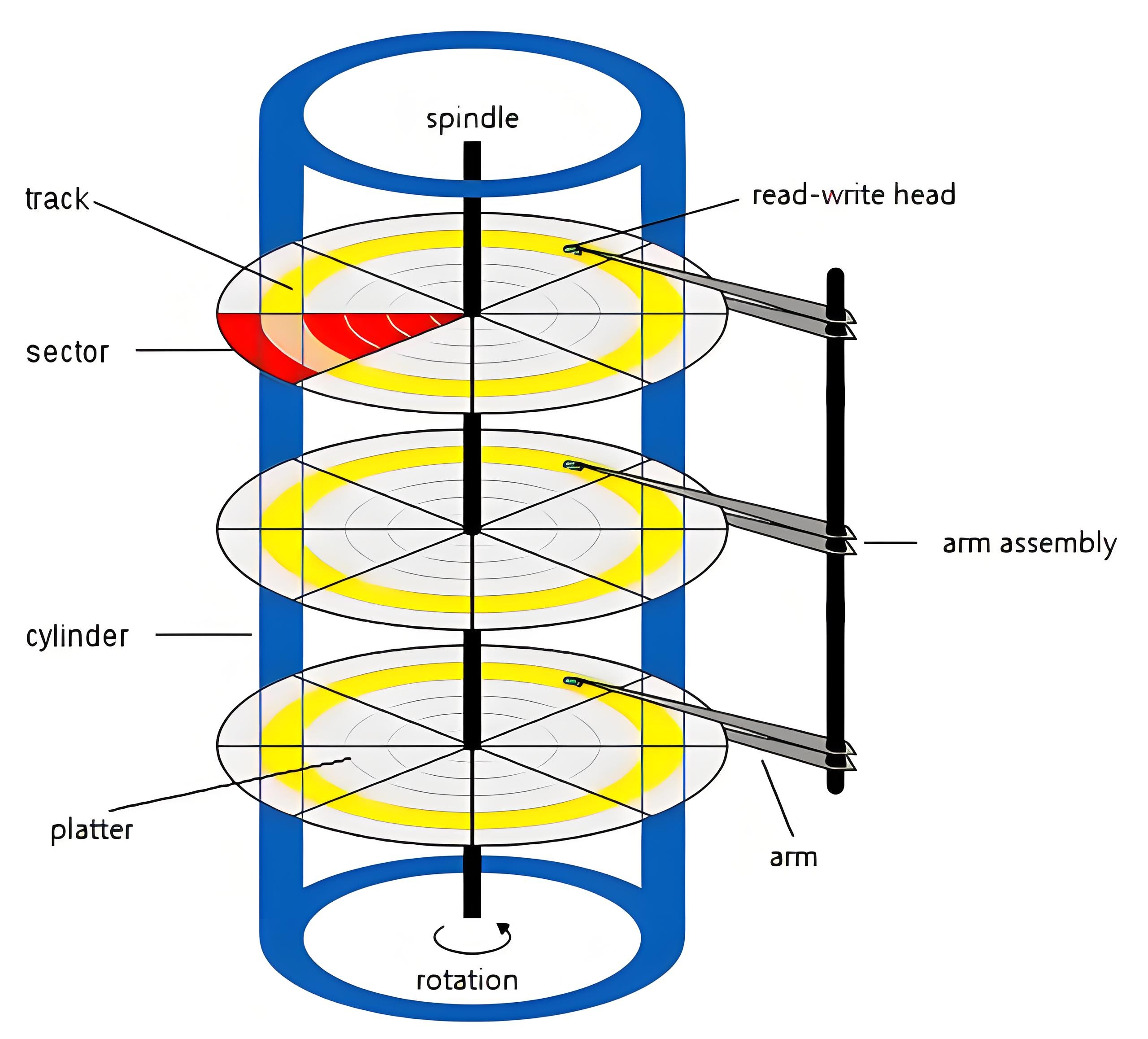
物理存储介质
盘片: 由硬质材料(如玻璃或铝合金)制成,表面涂覆精细的磁性材料层(如钴基合金)。数据以磁化方向(代表0或1)的形式存储在盘片的同心圆磁道上。一个硬盘通常包含多张盘片堆叠在同一主轴上。
扇区: 磁道被进一步划分为固定大小的扇区(通常是512字节或4K字节)。扇区是硬盘进行读写操作的最小物理单位。
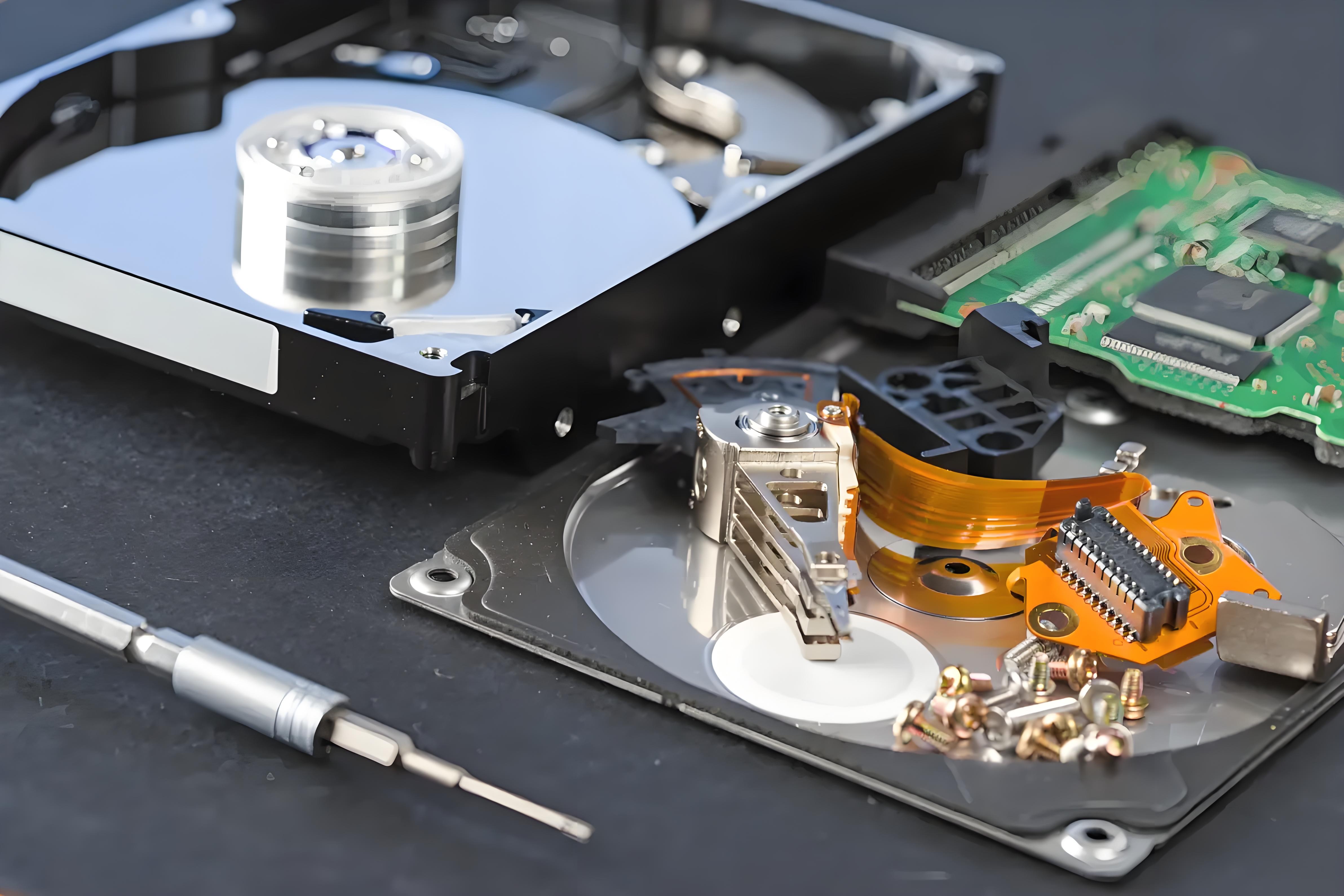
读写执行机构
读写磁头: 每个盘片表面通常对应两个磁头(上下各一),安装在同一个磁头臂上。
读磁头: 利用磁阻效应(如GMR或TMR)检测盘片上磁性区域产生的微弱磁场变化,并将其转换为电信号。
写磁头: 利用电流通过线圈产生的磁场,改变盘片上磁性颗粒的磁化方向(写入0或1)。
磁头臂: 支撑并精确定位磁头。所有盘片的磁头臂连接在同一个传动臂上。
音圈电机: 驱动传动臂在盘片半径方向快速、精确地移动,将磁头定位到目标磁道上。这是硬盘寻道操作的核心部件。
旋转驱动系统
主轴电机: 驱动盘片组以恒定高速旋转(如5400 RPM, 7200 RPM, 10000 RPM, 15000 RPM)。盘片旋转使得目标扇区能够移动到磁头下方。
轴承: 确保主轴平稳、低噪音、低振动地高速旋转。
控制与接口电路板
主控制器/处理器: 硬盘的“大脑”。负责执行固件指令,管理所有操作:
接收来自主机的读写命令和数据。
控制音圈电机进行寻道定位。
控制主轴电机转速。
管理缓存操作。
执行纠错码计算。
处理缺陷扇区管理。
协调所有内部组件的时序。
读写通道:
写入部分: 将主机传来的数字数据编码成适合写入磁头的电流波形(编码方式如RLL)。
读取部分: 将读磁头产生的微弱模拟信号放大、滤波,并通过复杂的信号处理技术(如PRML - 部分响应最大似然)将其解码还原为数字数据。这是处理盘片上高密度模拟信号的关键。
缓存: 高速DRAM内存。
作为主机与盘片之间速度差异的缓冲区,提升读写性能(预读、写缓存)。
存储固件微代码、临时数据、映射表(对于SMR硬盘尤其重要)等。
电机控制器: 精确控制主轴电机和音圈电机的转速和位置。
接口控制器: 实现与计算机主机的物理连接和通信协议(如SATA, SAS, 早期有PATA/IDE)。负责接收主机命令、传输数据和状态信息。
固件: 存储在硬盘上的专用ROM(通常在电路板上)和盘片系统区的微程序代码。它是硬盘的操作系统,控制着硬盘的所有低级操作、算法(如寻道算法、错误恢复算法、功耗管理、SMR管理)和功能。
外壳与空气过滤系统
将精密机械和电子组件封装在坚固、密封(或带精密过滤器)的金属壳内,提供物理保护,并维持内部清洁无尘的环境(普通消费级硬盘并非完全真空,而是充满洁净空气或惰性气体)。

核心工作流程逻辑:
接收命令: 主机通过接口(如SATA)发送读/写命令,指定逻辑块地址和数据。
地址转换: 主控制器将主机提供的逻辑块地址转换为物理位置:盘面号、磁道号(柱面号)、扇区号。
寻道:
控制器计算目标磁道与当前磁头位置的距离。
控制音圈电机驱动磁头臂快速移动到目标磁道上方。
此过程耗时称为寻道时间。
旋转等待:
盘片持续高速旋转。
控制器等待目标扇区旋转到磁头正下方。
此过程耗时称为旋转延迟(平均为盘片旋转半圈所需时间)。
数据传输:
读操作:
磁头感应盘片上的磁场变化,产生微弱模拟信号。
信号经过前置放大器放大。
读写通道进行滤波、数字化和复杂的PRML信号处理,解码还原出原始数字数据。
数据经过校验(ECC纠错),如有可纠正错误则修正。
修正后的数据存入缓存,再通过接口传输给主机。
写操作:
主机数据通过接口传入缓存。
控制器准备写入(可能需要读取原有数据,对于SMR或某些写操作)。
数据被编码(如RLL)成适合写入的波形。
读写通道驱动写磁头线圈产生精确的磁场。
当目标扇区旋转到磁头下方时,磁场改变盘片相应区域的磁化方向,完成数据写入。
写入后通常会立即读回验证(可选或部分执行)。
完成报告: 操作完成后,硬盘通过接口向主机发送状态报告(成功或错误)。
关键逻辑概念:
寻道时间 + 旋转延迟 + 传输时间 = 访问时间: 这是衡量硬盘性能的关键指标。
扇区映射与缺陷管理: 固件维护一个映射表,将逻辑块地址映射到物理扇区地址。出厂时或使用中发现坏扇区时,固件会将逻辑地址重映射到备用的保留扇区(位于盘片内圈或外圈特定区域)。
缓存策略: 写缓存(Write Cache)提升写入性能(主机写入缓存即认为完成,数据稍后写入盘片),但有数据丢失风险(需配合UPS或谨慎使用)。读缓存(Read Cache)存储最近或预读的数据,加速后续读取。
SMR(叠瓦式磁记录)特殊逻辑: 磁道部分重叠以增加密度。写入重叠磁道会干扰相邻磁道,因此需要复杂的固件管理:将盘面划分为多个“带”,只能在带内顺序写入(类似SSD),随机写入需要先在缓存整理,然后整块写入空白带。这显著增加了写入放大和复杂性。
模块间逻辑关系图:
+-----------------+ +-----------------+ +-----------------+
| 主机系统 (CPU) | <---> | 接口控制器 | <---> | 主控制器/处理器 |
+-----------------+ +-----------------+ +-----------------+
| |
| |
v v
+-----------------+ +-----------------+
| 缓存 (DRAM) | | 读写通道 |
+-----------------+ +-----------------+
|
|
v
+-----------------+ +-----------------+ +-----------------+
| 音圈电机控制器 | ----> | 磁头臂/磁头 | <---- | 主轴电机控制器 |
+-----------------+ +-----------------+ +-----------------+
| | |
| | |
v v v
+-----------------+ +-----------------+ +-----------------+
| 定位磁道 | | 读写磁性数据 | | 旋转盘片 |
+-----------------+ +-----------------+ +-----------------+
|
|
v
+-----------------+
| 盘片 (磁性介质) |
+-----------------+
总结:
机械硬盘是一个精密的机电一体化系统。其核心逻辑围绕着在高速旋转的磁性盘片上,通过精确定位的磁头进行数据的磁化存储(写)和磁信号检测(读)。控制电路(主控、固件、缓存、通道)负责协调机械运动(寻道、旋转)、处理复杂的模拟信号、管理数据流、处理错误并与主机通信。其性能瓶颈主要在于物理运动(寻道和旋转)所耗费的时间。