无人机影像的像素坐标转大地坐标
前言
最近老板让我实现:已知无人机的位置、姿态、相机参数,获取无人机所摄照片中某一地物的地理坐标,虽然本科学过摄影测量,可无奈当时没好好学,现在大脑一片空白·······但直觉告诉我:就是获取相机内外方位元素,然后进行坐标转换即可。
(如有错误,还请批评指正QAQ)
一、认识坐标系
拜读了一些大佬的博客,发现从像素坐标系到大地坐标系的转换过程中,涉及到好多坐标系,如:像素坐标系、图像坐标系、相机坐标系、机体坐标系、ENU坐标系、大地坐标系。下面简略介绍一下各个坐标系及其之间的联系。
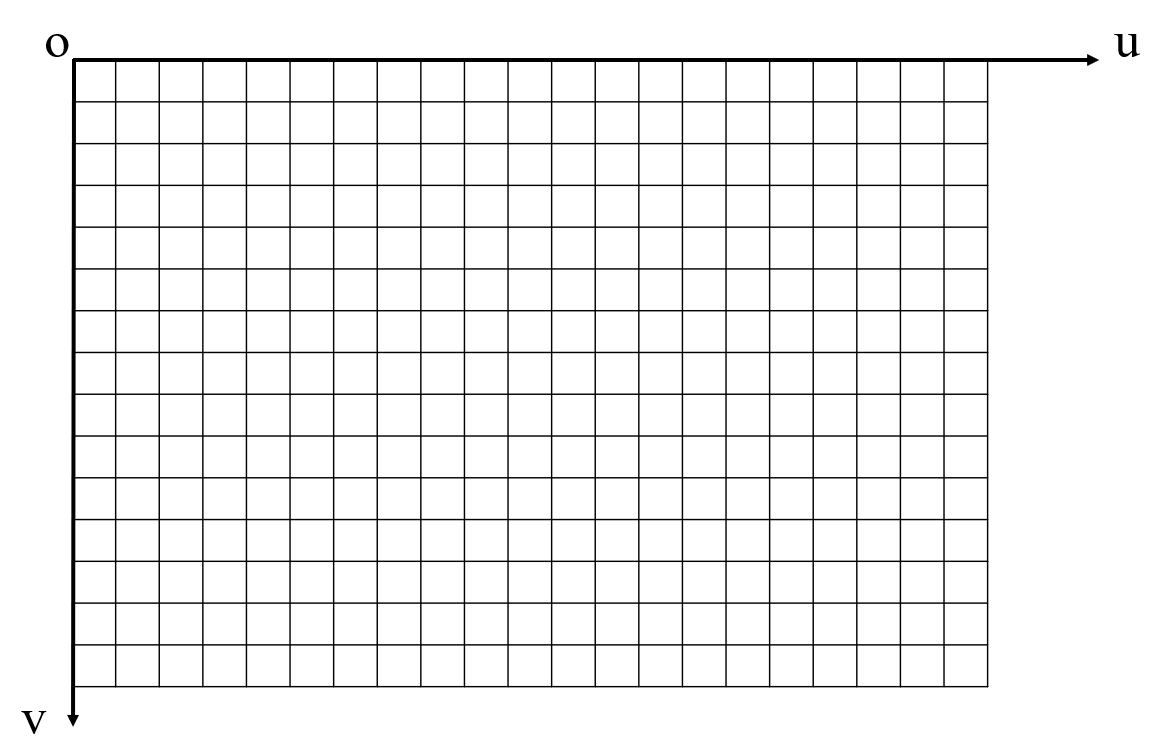
(1)像素坐标系
像素坐标系通常以o-u-v表示,原点o位于图像右上角,u轴水平指向右,v轴竖直指向下,以像素(pixel)为单位。
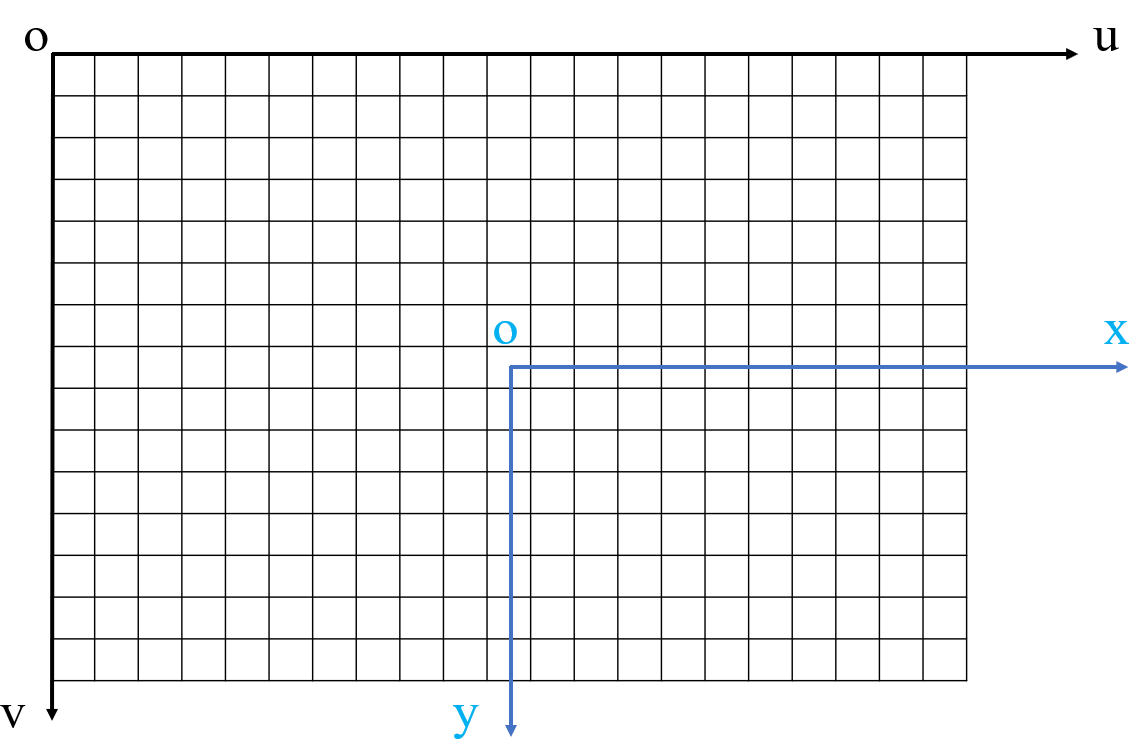
(2)图像坐标系
图像坐标系和像素坐标系在同一个平面上,原点是相机光中与成像平面的交点,通常为成像中心,以毫米(mm)为单位。从下图不难看出,图像坐标系和像素坐标系之间由平移、缩放关系,转换起来还是比较容易滴~
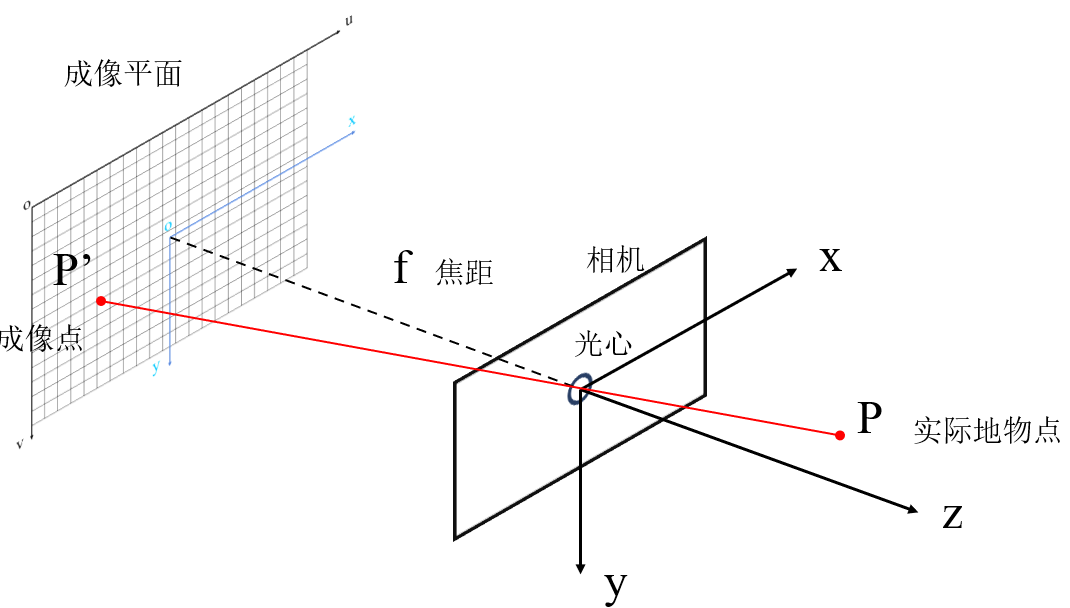
(3)相机坐标系
相机坐标系以光心为原点,x、y轴与像素坐标系下的u轴和v轴平行,以主光轴为z轴,光心距离像素平面的距离为焦距f。不难看出,实际地物点通过光心在成像面上成像,两者存在等比关系。
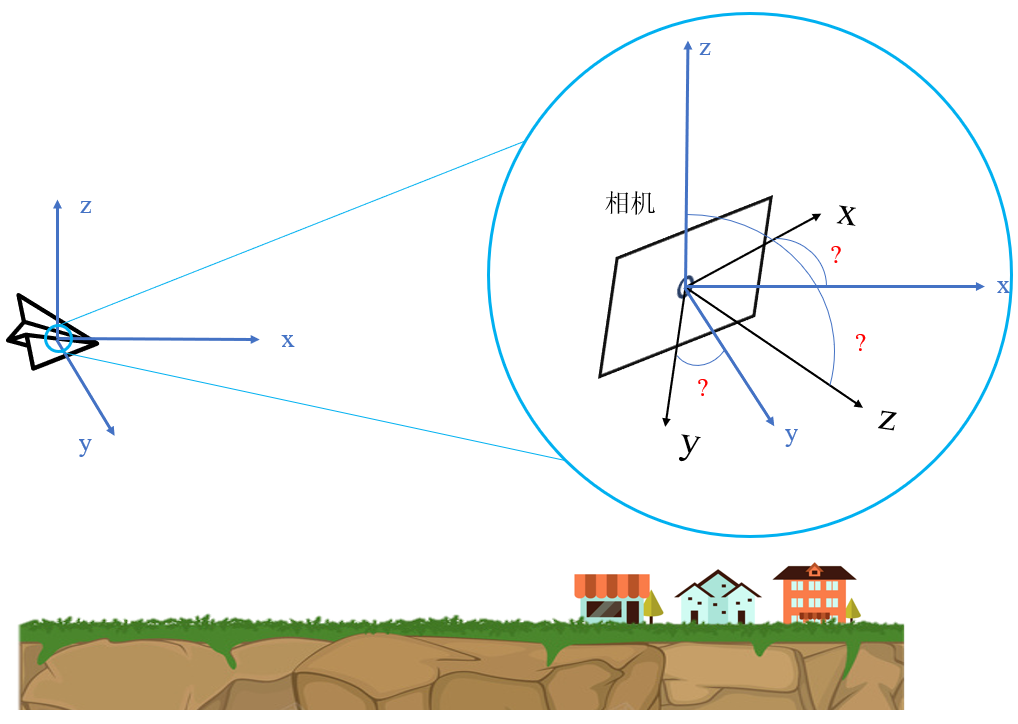
(4)机体坐标系
机体坐标系坐标原点与相机坐标系原点相同,该坐标系有的说是遵循右手法则,有的说是遵循左手法则,其实都差不多,只要在转换过程中确定某一种就行。这里以左手法则为例,x轴指向飞机前进方向,y轴指向前进方向右侧,z轴垂直于机身平面向上。机体坐标系与相机坐标系之间的关系依靠安装矩阵联系。
(5)ENU坐标系
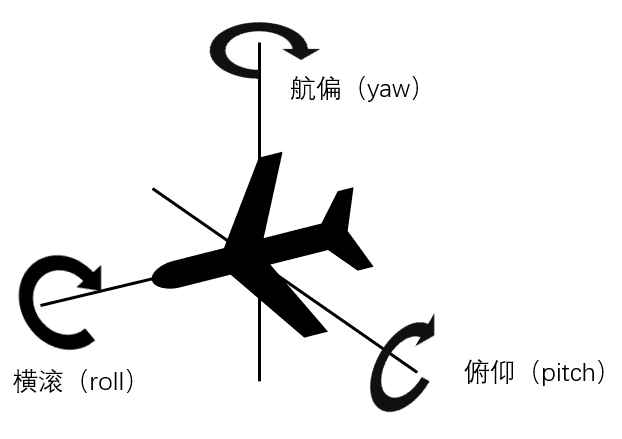
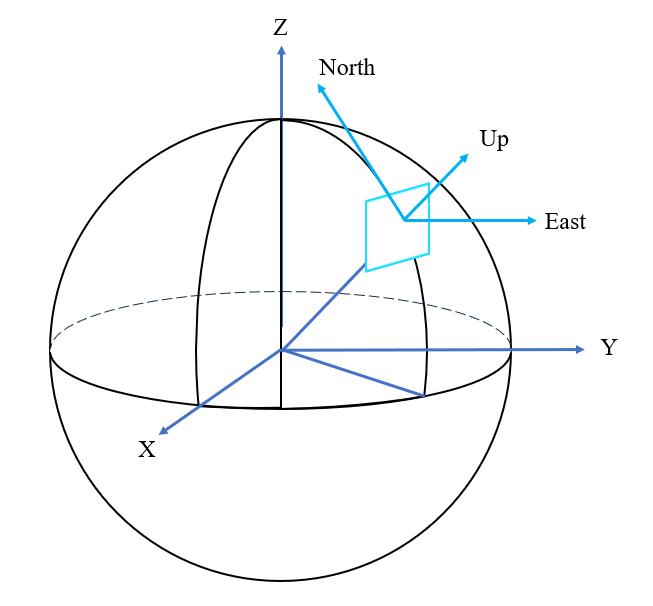
ENU坐标系即“东—北—天”坐标系(East—North—Up),坐标原点位与机体坐标系原点相同,x轴指向正东,y轴指向正北,Z轴垂直于水平面向上。因此ENU坐标系与机体坐标系的差别也在于轴的朝向不同,两者之间的关系靠飞机的姿态角(航偏、俯仰、横滚)联系。
(6)ECEF坐标系
ECEF坐标系(Earth-Centered Earth-Fixed)是一种笛卡尔坐标系,原点为地球质心,x轴指向本初子午线与赤道的交点,z轴与地轴平行指向北极点,y轴垂直于xoz面构成右手坐标系。ECEF与ENU是依靠旋转矩阵联系。
以上就是在转换过程中所涉及的坐标系,最后的ECEF坐标系是以(X,Y,Z)表示地面点的位置,但通常我们使用(大地经度,大地纬度,大地高)来表示,因此最后需要转换一下。
二、坐标系之间的转换
(1)像素坐标系向相机坐标系转换
已知条件:像素坐标系下的某一点的坐标(u,v),分辨率(dx,dy),图像大小(width,height,以像素为单位),焦距(f),深度z。
像素坐标系可以先转为图像坐标系,进而转为相机坐标系,也可以直接转为相机坐标系,这里采用后者。具体推导过程可以参考无人机——像素坐标系转世界坐标系(NED),主要是构建相机内参矩阵K:
其中:fx=f/dx,fy=f/dy,cx=width/2,cy=height/2,则像素坐标系下的坐标在相机坐标系下的坐标为:
其中:Z为深度,即场景点到相机光心沿光轴的距离。编写程序:
def pixel_to_camera(u0,v0,width,height,dx,dy,f,z):'''u0, v0: 像素坐标(以像素为单位)width,height:图像大小(以像素为单位)dx, dy: 每个像素的物理尺寸(mm/像素)f:相机焦距z:深度返回值为相机坐标系中的位置(单位mm)'''fx = f/dxfy = f/dycx = width/2#cx, cy: 图像中心(主点坐标,像素为单位,通常为图像宽/2,高/2)cy = height/2K = np.array([[fx,0,cx],[0,fy,cy],[0,0,1]])uv1 = np.array([[u0],[v0],[1]])xy1 = np.linalg.inv(K) @ uv1xyz = xy1*zreturn xyz注意:单位要匹配哦
(2)相机坐标系向机体坐标系转换
当相机坐标系原点与机体坐标系原点在同一位置时,只需要将相机坐标左乘旋转矩阵即可,该旋转矩阵也许会在技术文档中给出····举个简单的例子:
def camera_to_UAV(a,xyz_camera):'''a:相机旋转角度,R_cb以绕x轴旋转为例xyz_camera:相机坐标系下坐标'''theta = np.deg2rad(a)R_cb = np.array([[1,0,0],[0,np.cos(theta),-np.sin(theta)],[0,np.sin(theta),np.cos(theta)]])xyz_UAV = R_cb @ xyz_camerareturn xyz_UAV(3)机体坐标系向ENU坐标系转换
该过程就需要无人机的姿态角了,首先构建旋转矩阵:
def euler_to_rotation_matrix(yaw,pitch,roll):'''yaw:航偏角pitch:俯仰角roll:横滚角'''yaw = np.deg2rad(yaw)pitch = np.deg2rad(pitch)roll = np.deg2rad(roll)R_z = np.array([[np.cos(yaw),-np.sin(yaw),0],[np.sin(yaw),np.cos(yaw),0],[0,0,1]])R_y = np.array([[np.cos(pitch),0,np.sin(pitch)],[0,1,0],[-np.sin(pitch),0,np.cos(pitch)]])R_x = np.array([[1,0,0],[0,np.cos(roll),-np.sin(roll)],[0,np.sin(roll),np.cos(roll)]])R = R_z @ R_y @ R_xreturn R然后需要确定ENU坐标系的坐标原点,通常以无人机的位置为ENU坐标系原点,这样只需要左乘旋转矩阵即可完成转换:
def UVA_to_ENU(yaw,pitch,roll,UAV_coor):'''yaw:航偏角pitch:俯仰角roll:横滚角UAV_coor:机体坐标系下的坐标'''R = euler_to_rotation_matrix(yaw,pitch,roll)X_ENU = R @ UAV_coorreturn X_ENU(4)ENU坐标系ECEF坐标系转换
这里是已知ENU坐标原点的坐标,通常为WGS84下的坐标,以经度、纬度、大地高表示,需要先转为ECEF表示的坐标,然后再进行旋转和平移:
def ENU_to_ECEF(lat0,lon0,h0,ENU_coor):'''lat0,lon0,h0:ENU坐标系原点的经纬度和高度ENU_coor:ENU坐标系下的坐标'''wgs84_to_ecef = Transformer.from_crs('epsg:4979', 'epsg:4978',always_xy=True)x0,y0,z0 = wgs84_to_ecef.transform(lon0, lat0, h0)lat0_rad = np.radians(lat0)lon0_rad = np.radians(lon0)s_lat = np.sin(lat0_rad)s_lon = np.sin(lon0_rad)c_lat = np.cos(lat0_rad)c_lon = np.cos(lon0_rad)R = np.array([[-s_lon,c_lon,0],[-s_lat*c_lon,-s_lat*s_lon,c_lat],[c_lat*c_lon,c_lat*s_lon,s_lat]])ECEF = R.T @ ENU_coor + np.array([[x0],[y0],[z0]])return ECEF(5)坐标格式转换
最后为了易读,还是要转为经度、纬度、高度格式:
def ECEF_to_lla(ECEF_coor):ecef_to_wgs84 = Transformer.from_crs('epsg:4978', 'epsg:4979',always_xy=True)lon,lat,h = ecef_to_wgs84.transform(ECEF_coor[0],ECEF_coor[1],ECEF_coor[2])return np.array([[lon],[lat],[h]])至此,转换完成!