自主泊车算法
看我的git
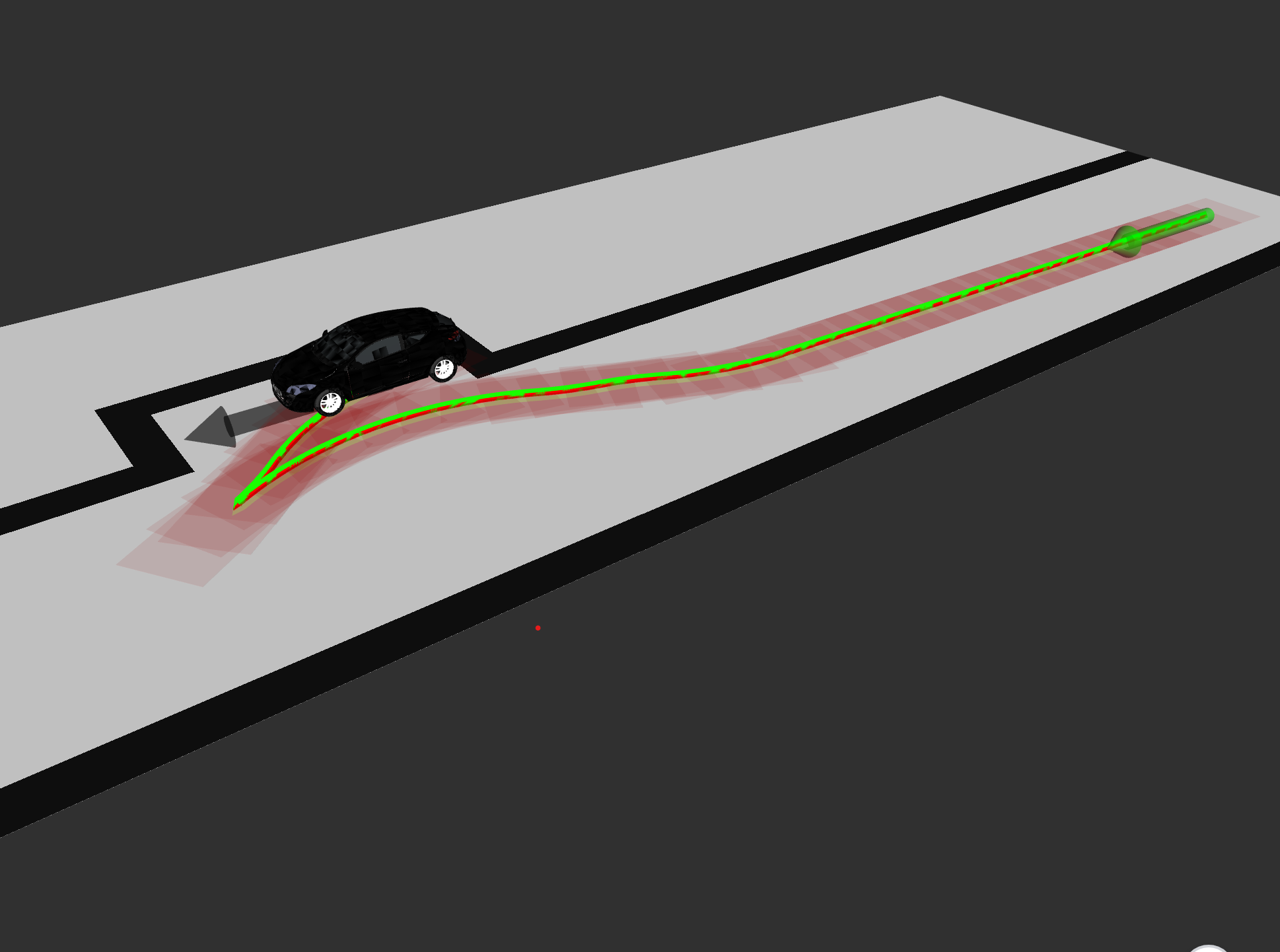
在 open space 空间下规划出⼀条⾃⻋到停⻋位的⽆碰撞轨迹 满⾜平滑约束 可跟踪
考虑动态障碍物约束
在路径不可⽤的情况下 具备重规划能⼒
重规划时能够做到⽆缝切换 即从原路径⽆缝切换到重规划路径 ⽆明显体感
规划频率 10HZ
看我的git
在 open space 空间下规划出⼀条⾃⻋到停⻋位的⽆碰撞轨迹 满⾜平滑约束 可跟踪
考虑动态障碍物约束
在路径不可⽤的情况下 具备重规划能⼒
重规划时能够做到⽆缝切换 即从原路径⽆缝切换到重规划路径 ⽆明显体感
规划频率 10HZ