提升行车安全的关键技术:BSD(盲点监测)与DSM(驾驶员监测)是如何工作的?
在提升行车安全的技术体系中,BSD(盲点监测系统) 和DSM(驾驶员状态监测系统) 分别从 “车辆周围环境盲区” 和 “驾驶员自身状态” 两个核心维度构建防护,二者协同形成 “车 - 人” 双重安全保障。以下是它们的具体工作原理:
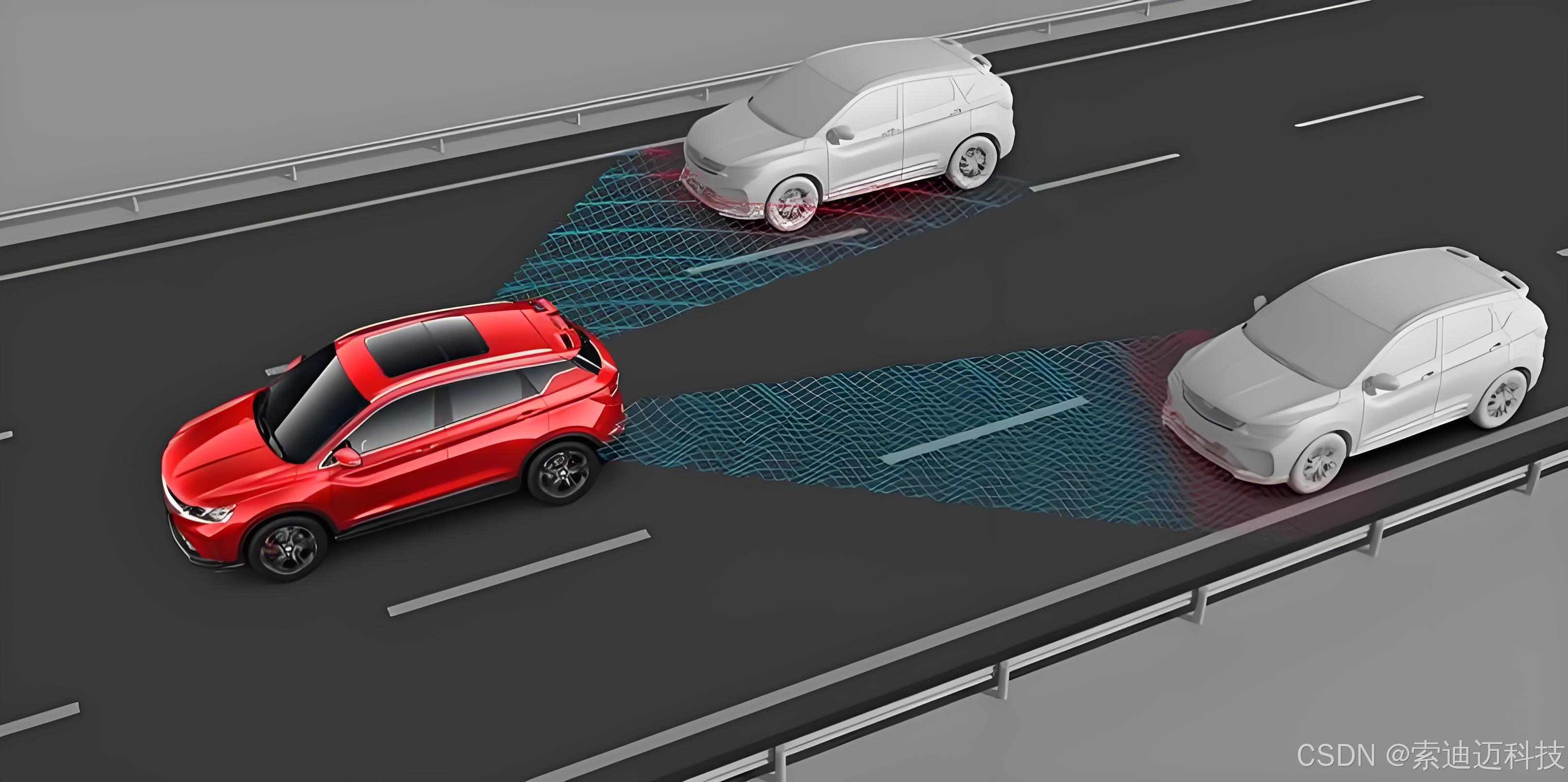
一、BSD(Blind Spot Detection,盲点监测系统):消除 “车外盲区” 的隐形卫士
车辆两侧的后视镜存在天然盲区(约 2-3 米范围), BSD 的核心是通过技术手段实时监测盲区,避免变道、超车时的碰撞风险。
1. 硬件构成
- 毫米波雷达:通常在车辆后保险杠两侧各安装 1 个(部分车型搭配摄像头辅助),雷达波长约 4-77GHz,具备穿透雨、雾、沙尘的能力,不受光照影响(夜间、隧道等场景稳定工作)。
- 警示装置:包括后视镜外侧的 LED 警示灯(视觉提醒)、方向盘 / 座椅震动模块(触觉提醒)、蜂鸣器(听觉提醒)。
2. 工作流程
- 监测范围:覆盖车辆两侧后方约 10-15 米、宽 2-3 米的区域(主要针对相邻车道),重点捕捉进入该区域的机动车、摩托车、自行车等移动物体。
- 触发逻辑:
- 当盲区有物体时,雷达通过反射波计算其速度和距离,系统判定存在碰撞风险后,立即点亮对应侧后视镜的 LED 灯(常亮提醒)。
- 若驾驶员此时打转向灯(准备向有风险的一侧变道),系统会触发二级警示:LED 灯闪烁 + 方向盘震动 / 蜂鸣音,强制提醒驾驶员放弃操作。
3. 扩展功能(增强安全性)
- RCTA(后方交叉交通预警):倒车出库时,BSD 雷达可监测两侧横向驶来的车辆(如停车场盲区),通过急促警报提醒驾驶员停车,避免 “鬼探头” 事故。
- 盲区辅助制动:部分高端车型在驾驶员执意变道时,会轻微制动单侧车轮,纠正行驶方向,强制规避碰撞。
二、DSM(Driver Status Monitoring,驾驶员状态监测系统):从 “人” 的源头规避风险
约 70% 的交通事故源于驾驶员疲劳、分心或操作失误,DSM 通过实时监测驾驶员状态,提前预警并干预。

1. 硬件构成
- 红外摄像头:安装在方向盘前方或仪表盘上方,可在白天、黑夜、逆光等环境下清晰捕捉驾驶员面部(不受光线干扰)。
- AI 算法芯片:通过深度学习模型分析面部特征(如眼睑开合度、瞳孔位置、头部姿态)和行为(如手部位置)。
2. 工作流程
- 疲劳监测:
- 捕捉眨眼频率(正常约每分钟 15-20 次,疲劳时增至 30 次以上,或单次眨眼时长超 0.5 秒)。
- 识别点头动作(打瞌睡时头部会不规律低垂)、面部表情僵硬(长时间驾驶导致的疲劳状态)。
- 系统通过上述数据计算 “疲劳指数”,超过阈值后触发警报。
- 分心监测:
- 追踪视线方向:若驾驶员视线偏离前方道路超 2 秒(如低头看手机、转头聊天),判定为分心。
- 监测双手位置:部分系统通过方向盘传感器判断双手是否脱离(如单手操作且持续时间过长)。
- 异常状态识别:
- 酒驾 / 毒驾:通过面部红润度、眼神涣散程度等特征辅助判断(需配合其他传感器,如酒精检测仪)。
- 突发疾病:若监测到驾驶员头部突然下垂、眼睛长时间闭合且无反应,判定为昏厥等紧急情况。
3. 干预方式
- 分级提醒:
- 轻度风险:仪表盘显示 “请集中注意力” 文字,伴随轻微蜂鸣。
- 中度风险:方向盘震动、座椅左侧 / 右侧交替震动(模拟 “提醒拍打”)。
- 重度风险(如驾驶员无响应):系统自动降低车速、开启双闪,部分车型可激活紧急制动并拨打救援电话。
三、BSD 与 DSM 的协同价值
- BSD 解决 “车外不可见风险”,让驾驶员对盲区状况 “了如指掌”;
- DSM 解决 “驾驶员自身状态风险”,确保驾驶员在关键时刻能正确操作。
二者结合,前者填补了车辆感知的物理盲区,后者弥补了人的注意力缺陷,形成 “车保护人、人掌控车” 的闭环安全体系,大幅降低交通事故发生率。例如:变道时,BSD 提醒盲区有车,而 DSM 同时监测到驾驶员正低头看手机(分心),会立即强化警报,避免驾驶员因分心忽略 BSD 提示而引发事故。