ROS2学习笔记18
一、使用Gazebo加载URDF机器人模型
1.1安装Gazebo
具体步骤见:ubuntu安装 ROS/ROS2 + Gazebo(适用于ubuntu20.04和ubuntu22.04)_ros2安装gazebo-CSDN博客
1.2 启动Gazebo并启动ROS插件
(1)Ctrl+Alt+T打开终端:
gazebo --verbose -s libgazebo_ros_init.so -s libgazebo_ros_factory.so
(2)插件节点及其服务介绍
使用指令查看节点列表:
ros2 node list
查看节点对外服务列表:
ros2 service list
除去和参数相关的几个服务,可以看到另外三个特殊服务:
- /spawn_entity,用于加载模型到gazebo中。
- /get_model_list,用于获取模型列表。
- /delete_entity,用于删除gazbeo中已经加载的模型。
想要让gazebo显示出我们配置好的fishbot使用/spawn_entity来加载即可。
查看服务接口类型:
ros2 service type /spawn_entity

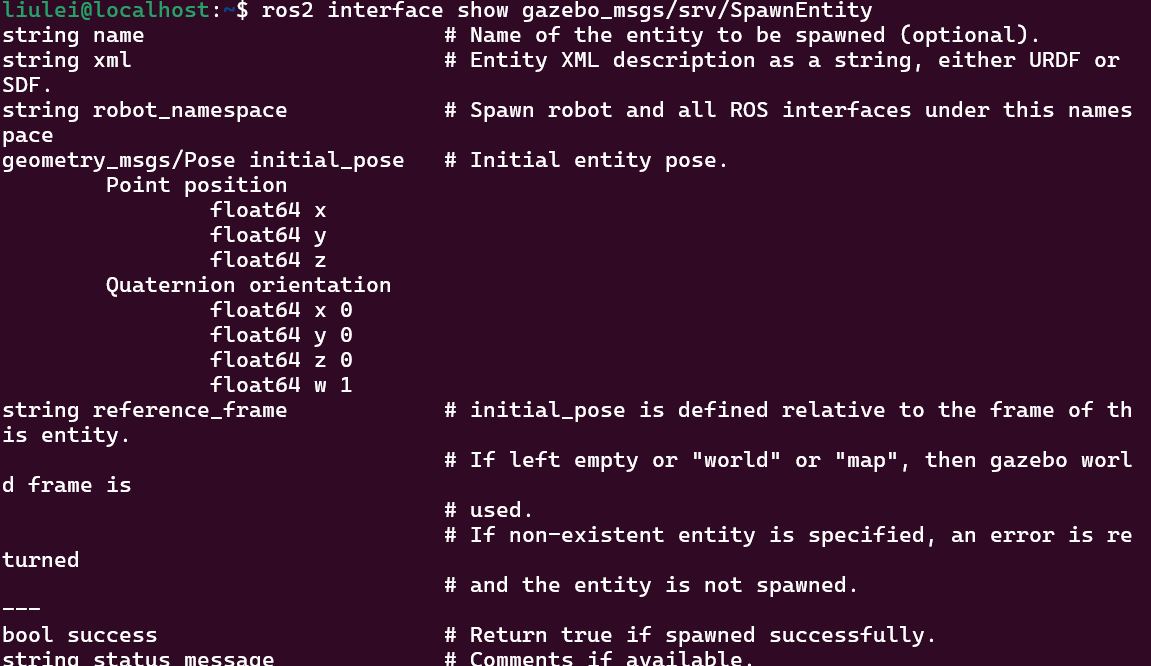
ros2 interface show gazebo_msgs/srv/SpawnEntity
可以看到服务的请求内容包括:
- string name ,需要加载的实体的名称 (可选的)。
- string xml,实体的XML描述字符串, URDF或者SDF。
- string robot_namespace ,产生的机器人和所有的ROS接口的命名空间,多机器人仿真的时候很有用。
- geometry_msgs/Pose initial_pose ,机器人的初始化位置。
- string reference_frame ,初始姿态是相对于该实体的frame定义的。如果保持"empty"或"world"或“map”,则使用 gazebo的world作为frame。如果指定了不存在的实体,则会返回错误
1.3 调用服务加载fishbot
(1)使用rqt服务请求工具
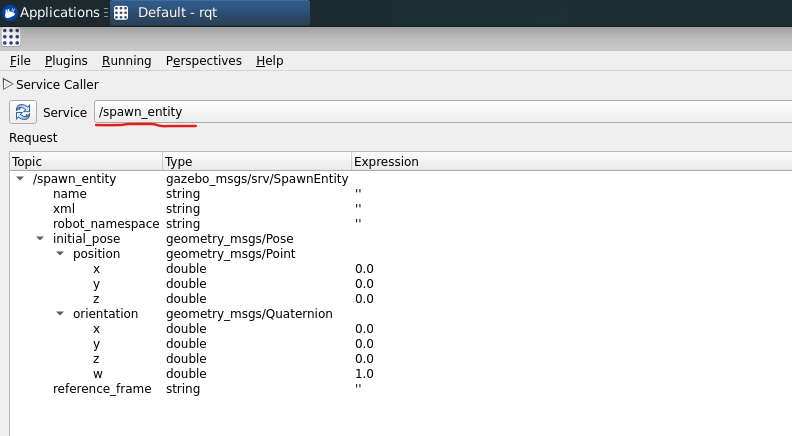
打开终端,输入rqt:
rqt在插件选项Plugins中选择Services->Service Caller,然后再下拉框选择/spawn_entity服务,即可看到下面的界面。
 (2)修改rqd中xml
(2)修改rqd中xml
FishBot的URDF模型复制粘贴,放到 xml 中。
xml内容如下:
<?xml version="1.0"?> <robot name="fishbot"><!-- Robot Footprint --><link name="base_footprint"/><joint name="base_joint" type="fixed"><parent link="base_footprint"/><child link="base_link"/><origin xyz="0.0 0.0 0.076" rpy="0 0 0"/></joint><!-- base link --><link name="base_link"><visual><origin xyz="0 0 0.0" rpy="0 0 0"/><geometry><cylinder length="0.12" radius="0.10"/></geometry><material name="blue"><color rgba="0.1 0.1 1.0 0.5" /> </material></visual><collision><origin xyz="0 0 0.0" rpy="0 0 0"/><geometry><cylinder length="0.12" radius="0.10"/></geometry><material name="blue"><color rgba="0.1 0.1 1.0 0.5" /> </material></collision><inertial><mass value="0.2"/><inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/></inertial></link><!-- laser link --><link name="laser_link"><visual><origin xyz="0 0 0" rpy="0 0 0"/><geometry><cylinder length="0.02" radius="0.02"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></visual><collision><origin xyz="0 0 0" rpy="0 0 0"/><geometry><cylinder length="0.02" radius="0.02"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></collision><inertial><mass value="0.1"/><inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/></inertial></link><!-- laser joint --><joint name="laser_joint" type="fixed"><parent link="base_link" /><child link="laser_link" /><origin xyz="0 0 0.075" /></joint><link name="imu_link"><visual><origin xyz="0 0 0.0" rpy="0 0 0"/><geometry><box size="0.02 0.02 0.02"/></geometry></visual><collision><origin xyz="0 0 0.0" rpy="0 0 0"/><geometry><box size="0.02 0.02 0.02"/></geometry></collision><inertial><mass value="0.1"/><inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/></inertial></link><!-- imu joint --><joint name="imu_joint" type="fixed"><parent link="base_link" /><child link="imu_link" /><origin xyz="0 0 0.02" /></joint><link name="left_wheel_link"><visual><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><cylinder length="0.04" radius="0.032"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></visual><collision><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><cylinder length="0.04" radius="0.032"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></collision><inertial><mass value="0.2"/><inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/></inertial></link><link name="right_wheel_link"><visual><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><cylinder length="0.04" radius="0.032"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></visual><collision><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><cylinder length="0.04" radius="0.032"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></collision><inertial><mass value="0.2"/><inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/></inertial></link><joint name="left_wheel_joint" type="continuous"><parent link="base_link" /><child link="left_wheel_link" /><origin xyz="-0.02 0.10 -0.06" /><axis xyz="0 1 0" /></joint><joint name="right_wheel_joint" type="continuous"><parent link="base_link" /><child link="right_wheel_link" /><origin xyz="-0.02 -0.10 -0.06" /><axis xyz="0 1 0" /></joint><link name="caster_link"><visual><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><sphere radius="0.016"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></visual><collision><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><sphere radius="0.016"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></collision><inertial><mass value="0.02"/><inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/></inertial></link><joint name="caster_joint" type="fixed"><parent link="base_link" /><child link="caster_link" /><origin xyz="0.06 0.0 -0.076" /><axis xyz="0 1 0" /></joint><gazebo reference="caster_link"><material>Gazebo/Black</material></gazebo><gazebo reference="caster_link"><mu1 value="0.0"/><mu2 value="0.0"/><kp value="1000000.0" /><kd value="10.0" /><!-- <fdir1 value="0 0 1"/> --></gazebo><gazebo><plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'><ros><namespace>/</namespace><remapping>cmd_vel:=cmd_vel</remapping><remapping>odom:=odom</remapping></ros><update_rate>30</update_rate><!-- wheels --><!-- <left_joint>left_wheel_joint</left_joint> --><!-- <right_joint>right_wheel_joint</right_joint> --><left_joint>left_wheel_joint</left_joint><right_joint>right_wheel_joint</right_joint><!-- kinematics --><wheel_separation>0.2</wheel_separation><wheel_diameter>0.065</wheel_diameter><!-- limits --><max_wheel_torque>20</max_wheel_torque><max_wheel_acceleration>1.0</max_wheel_acceleration><!-- output --><publish_odom>true</publish_odom><publish_odom_tf>true</publish_odom_tf><publish_wheel_tf>false</publish_wheel_tf><odometry_frame>odom</odometry_frame><robot_base_frame>base_footprint</robot_base_frame></plugin><plugin name="fishbot_joint_state" filename="libgazebo_ros_joint_state_publisher.so"><ros><remapping>~/out:=joint_states</remapping></ros><update_rate>30</update_rate><joint_name>right_wheel_joint</joint_name><joint_name>left_wheel_joint</joint_name></plugin> </gazebo> <gazebo reference="laser_link"><material>Gazebo/Black</material></gazebo><gazebo reference="imu_link"><sensor name="imu_sensor" type="imu"><plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin"><ros><namespace>/</namespace><remapping>~/out:=imu</remapping></ros><initial_orientation_as_reference>false</initial_orientation_as_reference></plugin><always_on>true</always_on><update_rate>100</update_rate><visualize>true</visualize><imu><angular_velocity><x><noise type="gaussian"><mean>0.0</mean><stddev>2e-4</stddev><bias_mean>0.0000075</bias_mean><bias_stddev>0.0000008</bias_stddev></noise></x><y><noise type="gaussian"><mean>0.0</mean><stddev>2e-4</stddev><bias_mean>0.0000075</bias_mean><bias_stddev>0.0000008</bias_stddev></noise></y><z><noise type="gaussian"><mean>0.0</mean><stddev>2e-4</stddev><bias_mean>0.0000075</bias_mean><bias_stddev>0.0000008</bias_stddev></noise></z></angular_velocity><linear_acceleration><x><noise type="gaussian"><mean>0.0</mean><stddev>1.7e-2</stddev><bias_mean>0.1</bias_mean><bias_stddev>0.001</bias_stddev></noise></x><y><noise type="gaussian"><mean>0.0</mean><stddev>1.7e-2</stddev><bias_mean>0.1</bias_mean><bias_stddev>0.001</bias_stddev></noise></y><z><noise type="gaussian"><mean>0.0</mean><stddev>1.7e-2</stddev><bias_mean>0.1</bias_mean><bias_stddev>0.001</bias_stddev></noise></z></linear_acceleration></imu></sensor></gazebo><gazebo reference="laser_link"><sensor name="laser_sensor" type="ray"><always_on>true</always_on><visualize>true</visualize><update_rate>5</update_rate><pose>0 0 0.075 0 0 0</pose><ray><scan><horizontal><samples>360</samples><resolution>1.000000</resolution><min_angle>0.000000</min_angle><max_angle>6.280000</max_angle></horizontal></scan><range><min>0.120000</min><max>3.5</max><resolution>0.015000</resolution></range><noise><type>gaussian</type><mean>0.0</mean><stddev>0.01</stddev></noise></ray><plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so"><ros><!-- <namespace>/tb3</namespace> --><remapping>~/out:=scan</remapping></ros><output_type>sensor_msgs/LaserScan</output_type><frame_name>laser_link</frame_name></plugin></sensor></gazebo></robot>详细解析见:示例fishbot_gazebo.urdf代码解析-CSDN博客
接着把原来的 xml 的 Expression 项的 "" 删掉,点击右上角的Call:
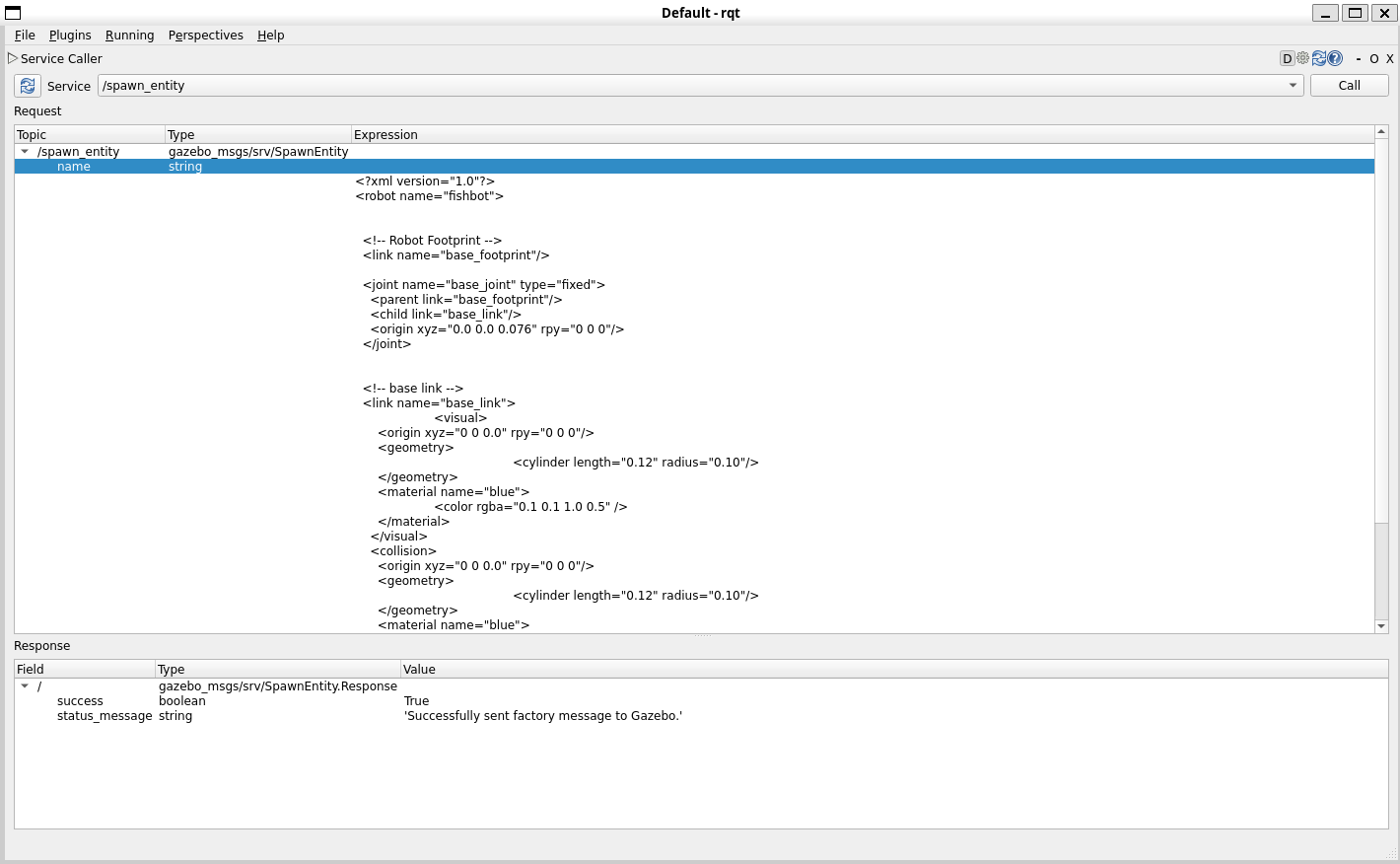
就可以看到回应说成功把机器人导入gazebo了。

1.4 在不同位置加载多个机器人
(1)修改name和position的x坐标
修改rqt中的参数,修改name为fishbot_0,然后修改位置,让第二个机器人和第一个相距1m的地方生产(修改position的x为1.0)。
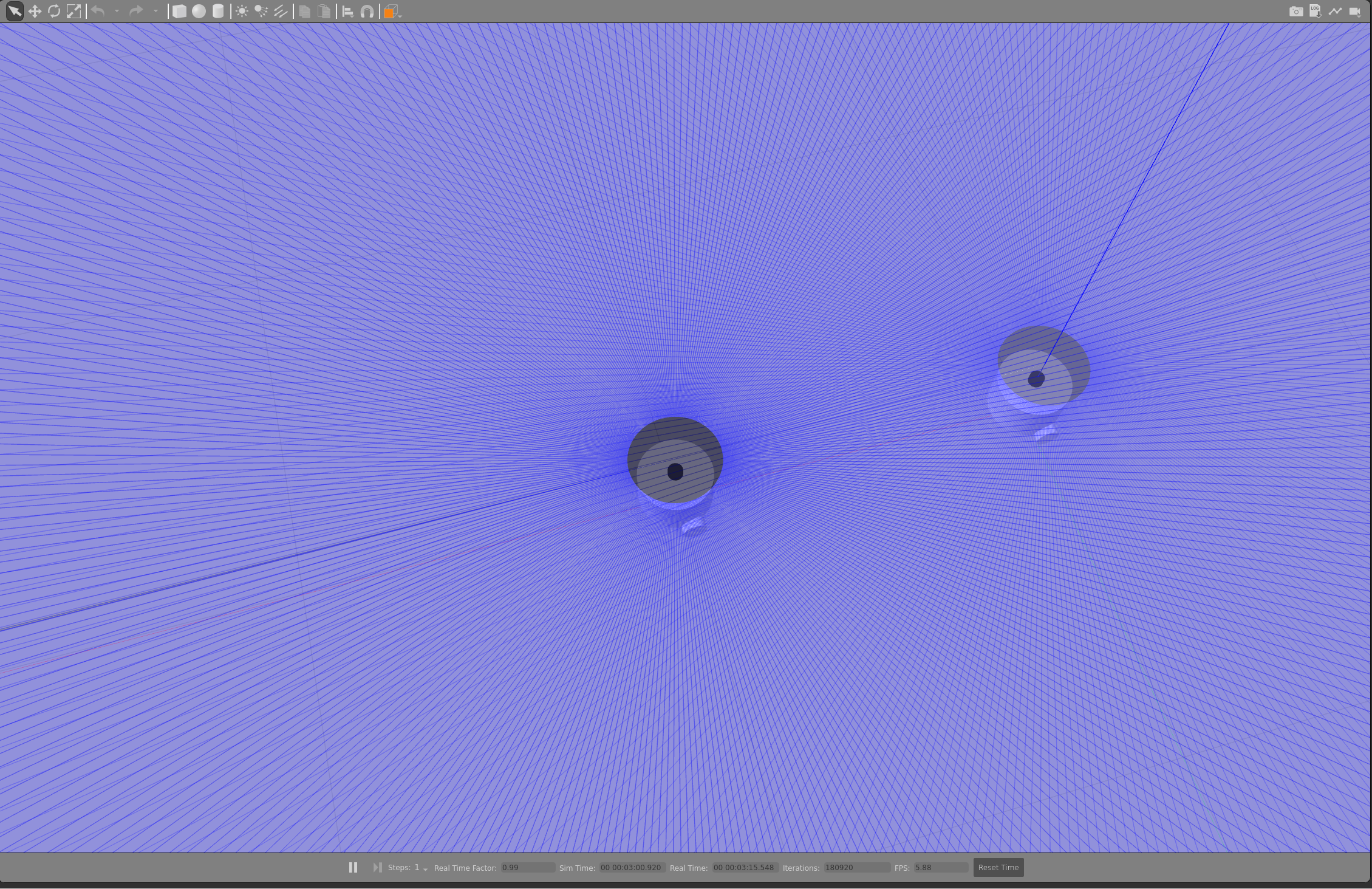
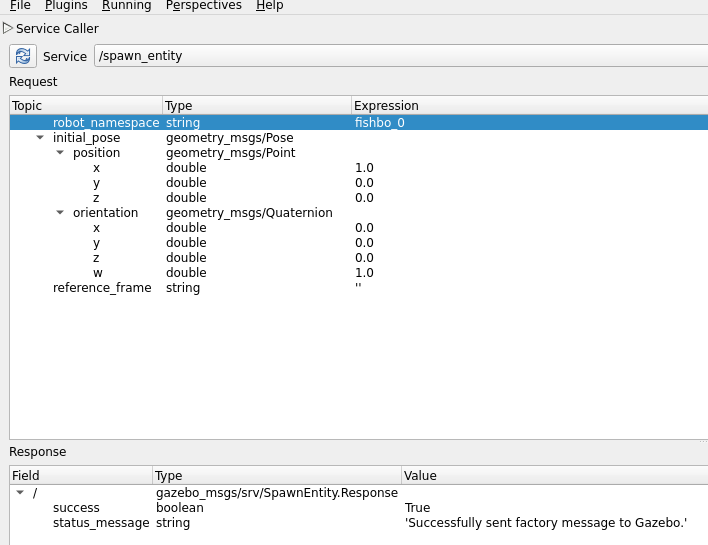 (2)点击Call
(2)点击Call
发现多出了一个机器人,距离刚好是在X轴(红色)1米(一个小格子一米)处。
1.5 查询和删除机器人
(1)切换/get_model_list
切换Service栏为/get_model_list,点击Call。
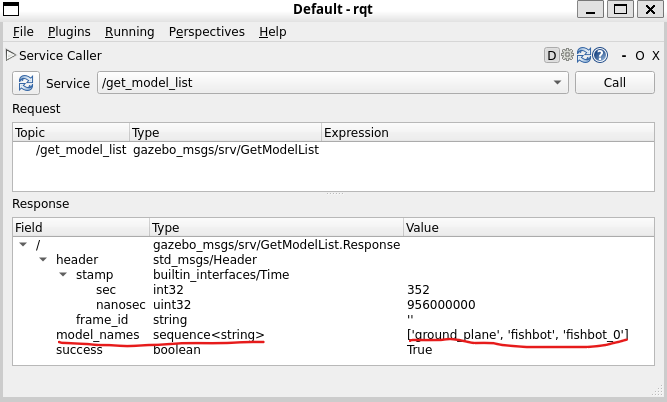
查到了三个模型,一个ground_plane(大地),一个fishbot,一个fishbot_0。
(2)切换/delete_entity
切换Service栏为/delete_entity,点击Call。
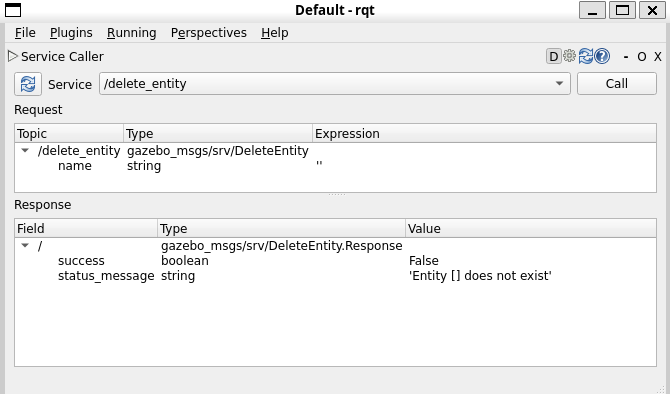
在Topic栏中name一行的 "" 修改为fishbot_0, 点击Call,回收0号fishbot。
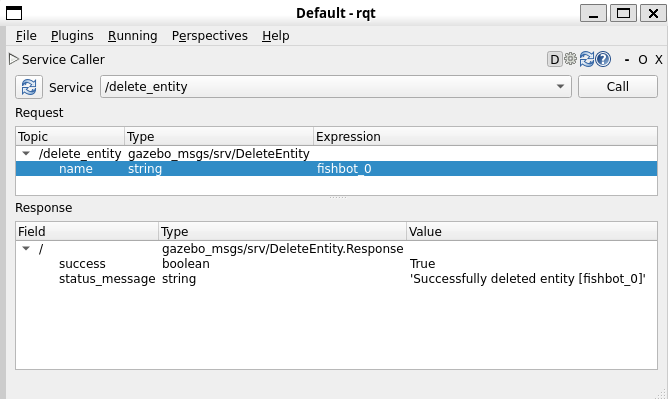
观察gazebo发现机器人已回收。
二、将启动gazebo和生产fishbot写成launch文件
2.1 创建launch文件
在工作空间下打开终端:
touch src/fishbot_description/launch/gazebo.launch.py
可以使用指令 tree 查看结构:
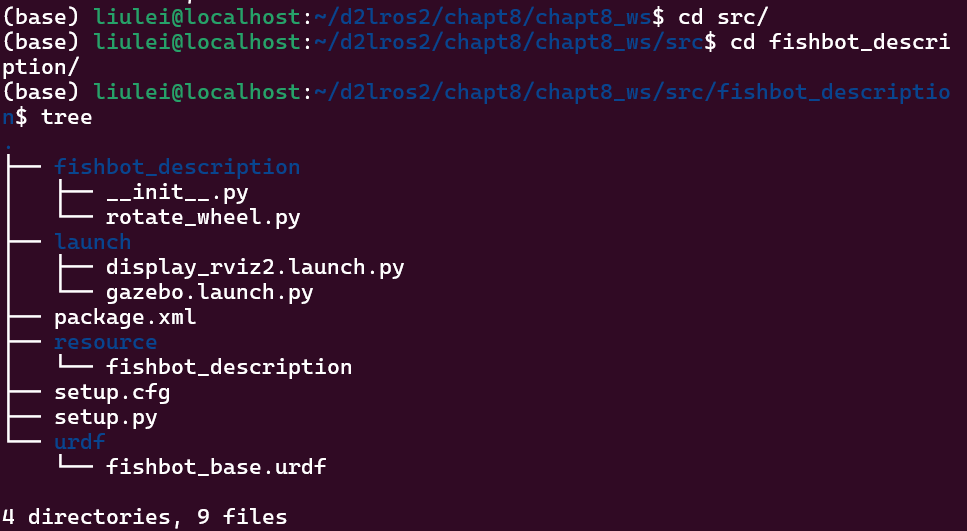
2.2 编写launch文件
(1)编写启动gazebo的launch节点
可以将“启动gazebo命令”写成一个launch节点:
ExecuteProcess(cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so', gazebo_world_path],output='screen')
上面我们加载机器人是直接将XML格式的URDF复制过去进行加载的,这样很不方便,我们可以使用gazebo_ros为我们提供好的一个叫做spawn_entity.py节点,该节点支持从文件地址直接生产机器人到Gazebo。
spawn_entity.py节点需要两个参数,一个机器人的模型名字和urdf的文件地址:
spawn_entity_cmd = Node(package='gazebo_ros', executable='spawn_entity.py',arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen')
(2)编写完整launch文件
nano import os from launch import LaunchDescription from launch.actions import ExecuteProcess from launch_ros.actions import Node from launch_ros.substitutions import FindPackageSharedef generate_launch_description():robot_name_in_model = 'fishbot'package_name = 'fishbot_description'urdf_name = "fishbot_gazebo.urdf"ld = LaunchDescription()pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}')# Start Gazebo serverstart_gazebo_cmd = ExecuteProcess(cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so'],output='screen')# Launch the robotspawn_entity_cmd = Node(package='gazebo_ros', executable='spawn_entity.py',arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen')ld.add_action(start_gazebo_cmd)ld.add_action(spawn_entity_cmd)return ld
2.3 编译和测试
(1)编译
在工作空间下打开终端:
colcon build --packages-select fishbot_description注意:
(1) spawn_entity.py需要安装numpy:
pip install numpy(2)在urdf文件夹下新建fishbot_gazebo.urdf
touch src/fishbot_description/urdf/fishbot_gazebo.urdf nano src/fishbot_description/urdf/fishbot_gazebo.urdf<?xml version="1.0"?> <robot name="fishbot"><!-- Robot Footprint --><link name="base_footprint"/><joint name="base_joint" type="fixed"><parent link="base_footprint"/><child link="base_link"/><origin xyz="0.0 0.0 0.076" rpy="0 0 0"/></joint><!-- base link --><link name="base_link"><visual><origin xyz="0 0 0.0" rpy="0 0 0"/><geometry><cylinder length="0.12" radius="0.10"/></geometry><material name="blue"><color rgba="0.1 0.1 1.0 0.5" /> </material></visual><collision><origin xyz="0 0 0.0" rpy="0 0 0"/><geometry><cylinder length="0.12" radius="0.10"/></geometry><material name="blue"><color rgba="0.1 0.1 1.0 0.5" /> </material></collision><inertial><mass value="0.2"/><inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/></inertial></link><!-- laser link --><link name="laser_link"><visual><origin xyz="0 0 0" rpy="0 0 0"/><geometry><cylinder length="0.02" radius="0.02"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></visual><collision><origin xyz="0 0 0" rpy="0 0 0"/><geometry><cylinder length="0.02" radius="0.02"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></collision><inertial><mass value="0.1"/><inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/></inertial></link><!-- laser joint --><joint name="laser_joint" type="fixed"><parent link="base_link" /><child link="laser_link" /><origin xyz="0 0 0.075" /></joint><link name="imu_link"><visual><origin xyz="0 0 0.0" rpy="0 0 0"/><geometry><box size="0.02 0.02 0.02"/></geometry></visual><collision><origin xyz="0 0 0.0" rpy="0 0 0"/><geometry><box size="0.02 0.02 0.02"/></geometry></collision><inertial><mass value="0.1"/><inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/></inertial></link><!-- imu joint --><joint name="imu_joint" type="fixed"><parent link="base_link" /><child link="imu_link" /><origin xyz="0 0 0.02" /></joint><link name="left_wheel_link"><visual><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><cylinder length="0.04" radius="0.032"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></visual><collision><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><cylinder length="0.04" radius="0.032"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></collision><inertial><mass value="0.2"/><inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/></inertial></link><link name="right_wheel_link"><visual><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><cylinder length="0.04" radius="0.032"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></visual><collision><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><cylinder length="0.04" radius="0.032"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></collision><inertial><mass value="0.2"/><inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/></inertial></link><joint name="left_wheel_joint" type="continuous"><parent link="base_link" /><child link="left_wheel_link" /><origin xyz="-0.02 0.10 -0.06" /><axis xyz="0 1 0" /></joint><joint name="right_wheel_joint" type="continuous"><parent link="base_link" /><child link="right_wheel_link" /><origin xyz="-0.02 -0.10 -0.06" /><axis xyz="0 1 0" /></joint><link name="caster_link"><visual><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><sphere radius="0.016"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></visual><collision><origin xyz="0 0 0" rpy="1.57079 0 0"/><geometry><sphere radius="0.016"/></geometry><material name="black"><color rgba="0.0 0.0 0.0 0.5" /> </material></collision><inertial><mass value="0.02"/><inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/></inertial></link><joint name="caster_joint" type="fixed"><parent link="base_link" /><child link="caster_link" /><origin xyz="0.06 0.0 -0.076" /><axis xyz="0 1 0" /></joint><gazebo reference="caster_link"><material>Gazebo/Black</material></gazebo><gazebo reference="caster_link"><mu1 value="0.0"/><mu2 value="0.0"/><kp value="1000000.0" /><kd value="10.0" /><!-- <fdir1 value="0 0 1"/> --></gazebo><gazebo><plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'><ros><namespace>/</namespace><remapping>cmd_vel:=cmd_vel</remapping><remapping>odom:=odom</remapping></ros><update_rate>30</update_rate><!-- wheels --><!-- <left_joint>left_wheel_joint</left_joint> --><!-- <right_joint>right_wheel_joint</right_joint> --><left_joint>left_wheel_joint</left_joint><right_joint>right_wheel_joint</right_joint><!-- kinematics --><wheel_separation>0.2</wheel_separation><wheel_diameter>0.065</wheel_diameter><!-- limits --><max_wheel_torque>20</max_wheel_torque><max_wheel_acceleration>1.0</max_wheel_acceleration><!-- output --><publish_odom>true</publish_odom><publish_odom_tf>true</publish_odom_tf><publish_wheel_tf>false</publish_wheel_tf><odometry_frame>odom</odometry_frame><robot_base_frame>base_footprint</robot_base_frame></plugin><plugin name="fishbot_joint_state" filename="libgazebo_ros_joint_state_publisher.so"><ros><remapping>~/out:=joint_states</remapping></ros><update_rate>30</update_rate><joint_name>right_wheel_joint</joint_name><joint_name>left_wheel_joint</joint_name></plugin> </gazebo> <gazebo reference="laser_link"><material>Gazebo/Black</material></gazebo><gazebo reference="imu_link"><sensor name="imu_sensor" type="imu"><plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin"><ros><namespace>/</namespace><remapping>~/out:=imu</remapping></ros><initial_orientation_as_reference>false</initial_orientation_as_reference></plugin><always_on>true</always_on><update_rate>100</update_rate><visualize>true</visualize><imu><angular_velocity><x><noise type="gaussian"><mean>0.0</mean><stddev>2e-4</stddev><bias_mean>0.0000075</bias_mean><bias_stddev>0.0000008</bias_stddev></noise></x><y><noise type="gaussian"><mean>0.0</mean><stddev>2e-4</stddev><bias_mean>0.0000075</bias_mean><bias_stddev>0.0000008</bias_stddev></noise></y><z><noise type="gaussian"><mean>0.0</mean><stddev>2e-4</stddev><bias_mean>0.0000075</bias_mean><bias_stddev>0.0000008</bias_stddev></noise></z></angular_velocity><linear_acceleration><x><noise type="gaussian"><mean>0.0</mean><stddev>1.7e-2</stddev><bias_mean>0.1</bias_mean><bias_stddev>0.001</bias_stddev></noise></x><y><noise type="gaussian"><mean>0.0</mean><stddev>1.7e-2</stddev><bias_mean>0.1</bias_mean><bias_stddev>0.001</bias_stddev></noise></y><z><noise type="gaussian"><mean>0.0</mean><stddev>1.7e-2</stddev><bias_mean>0.1</bias_mean><bias_stddev>0.001</bias_stddev></noise></z></linear_acceleration></imu></sensor></gazebo><gazebo reference="laser_link"><sensor name="laser_sensor" type="ray"><always_on>true</always_on><visualize>true</visualize><update_rate>5</update_rate><pose>0 0 0.075 0 0 0</pose><ray><scan><horizontal><samples>360</samples><resolution>1.000000</resolution><min_angle>0.000000</min_angle><max_angle>6.280000</max_angle></horizontal></scan><range><min>0.120000</min><max>3.5</max><resolution>0.015000</resolution></range><noise><type>gaussian</type><mean>0.0</mean><stddev>0.01</stddev></noise></ray><plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so"><ros><!-- <namespace>/tb3</namespace> --><remapping>~/out:=scan</remapping></ros><output_type>sensor_msgs/LaserScan</output_type><frame_name>laser_link</frame_name></plugin></sensor></gazebo></robot>

(2)运行
source install/setup.bash
ros2 launch fishbot_description gazebo.launch.py
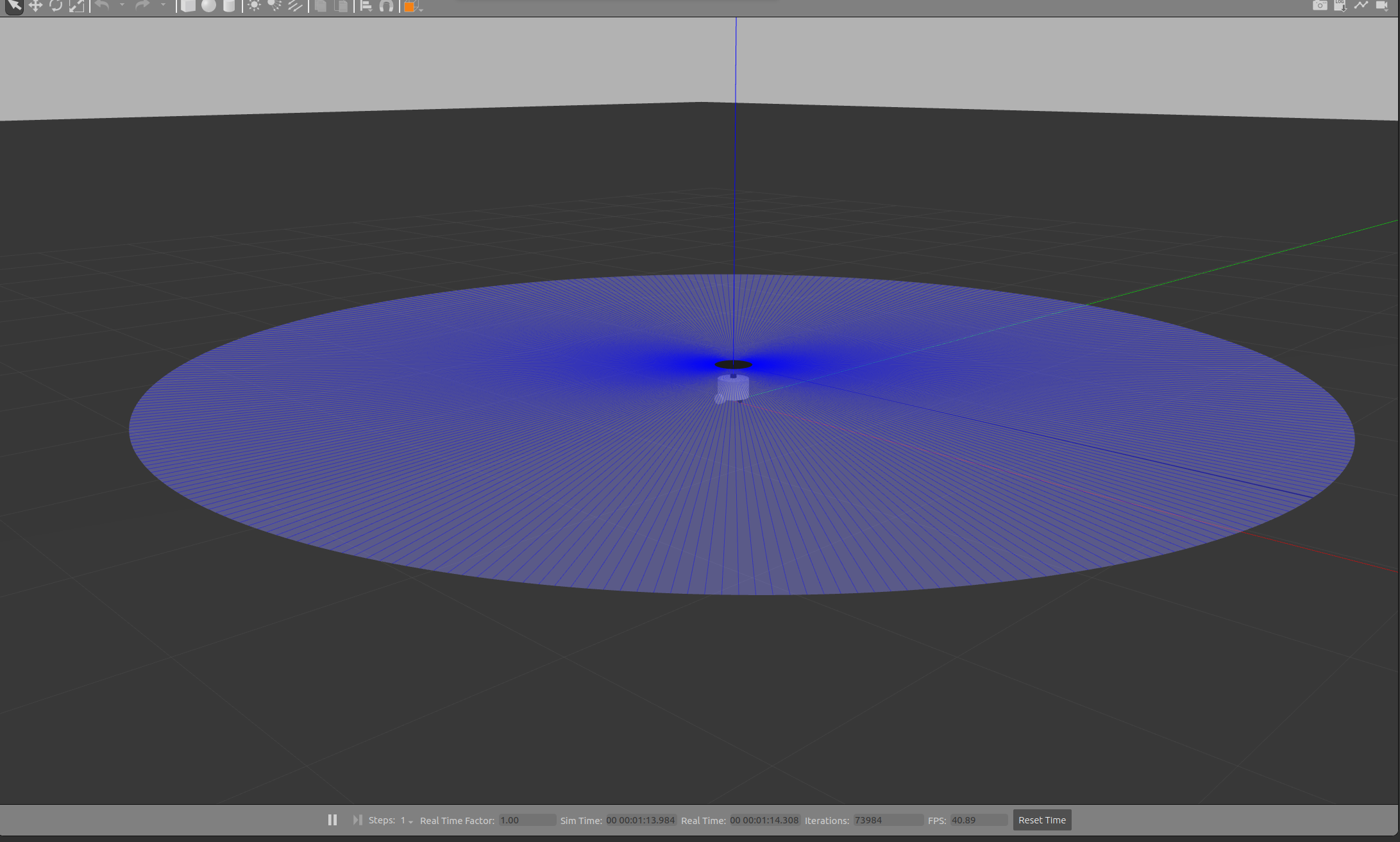
如果运行后Gazebo打开却没有机器人模型,可能是使用虚拟机的问题,在ubuntu双系统下按照以上操作能够正常加载模型。
学习:【ROS2机器人入门到实战】使用gazebo加载URDF_gazebo加载urdf文件-CSDN博客