机器视觉系统工业相机的成像原理及如何选型
机器视觉系统是一种模拟人类视觉功能,通过光学装置和非接触式传感器获取图像数据,并进行分析和处理,以实现对目标物体的识别、测量、检测和定位等功能的智能化系统。其目的是让机器能够理解和解释视觉信息,从而做出决策或执行任务。简单来说,机器视觉是用机器代替人眼来做测量和判断。
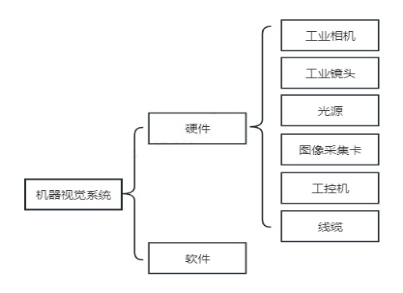
机器视觉系统
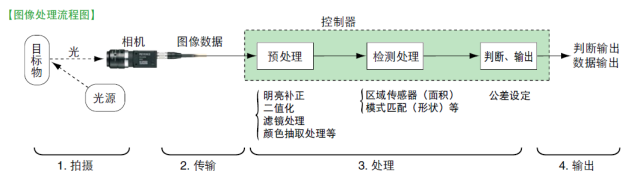
图像处理流程
工业相机是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。
一、工业相机的工作原理
1.图像采集:通过镜头收集被拍摄物体反射或透射的光线,将其聚焦在图像传感器上。
2.光电转换:图像传感器(常见的有 CCD 和 CMOS)将光信号转换为电信号。以 CMOS 传感器为例,每个像素点都有一个感光二极管,光线照射时产生与光强成正比的电荷,进而被转换为电压信号。
3.信号处理:转换后的电信号经过放大器进行放大,并通过模数转换器(ADC)将模拟信号转换为数字信号,这些数字信号经过处理后形成数字图像数据,传输给计算机等设备进行后续分析。
二、工业相机的分类
按图像传感器类型:分为 CCD工业相机和 CMOS工业相机。
按输出色彩:分为彩色工业相机和黑白(单色)工业相机。
按扫描方式:面阵工业相机和线阵工业相机。
按输出信号方式分:模拟工业相机、数字工业相机。
按响应频率范围分:可见光(普通)相机、红外相机、紫外相机等。
按照光谱波段数量来分,可分为高光谱相机和多光谱相机。
按照成像维度分:2D工业相机和3D工业相机
特殊工业相机:偏振工业相机。
三、工业相机的传感器
图像传感器作为工业相机核心部件,其靶面的大小,往往直接关系到成像的质量。通常来讲,图像的成像质量与像素的大小成正比。这也就意味着,同样大小的图像传感器,如果分辨率越高,那么像素尺寸就越小,其成像质量也就会越差。
工业上的1/2.3’CMOS传感器,分辨率通常只在500万像素级别,而 民用的1/2.3’CMOS传感器,则分辨率可以做到1600万像素甚至更高的级别。因此工业相机的成像质量往往要比民用的相机成像质量要好;同时,如果相同分辨率的相机,传感器面积越大,则其单位像素的面积也越大,成像质量也会越好。同样的500万像素的相机,2/3’的传感器成像质量就要好于1/2’的。
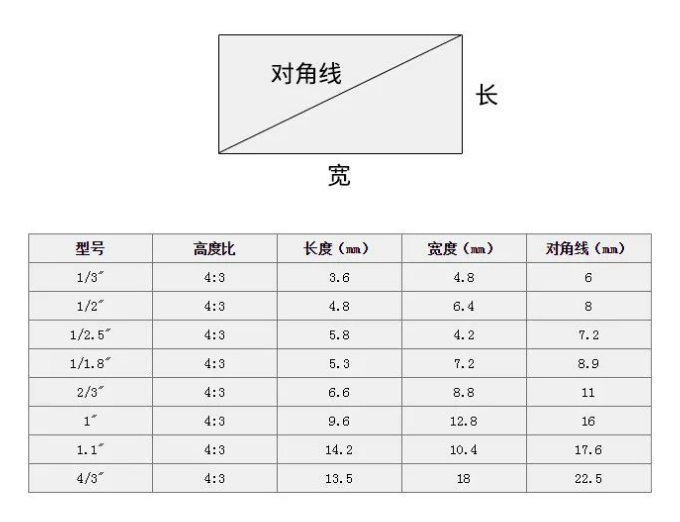
常见的传感器尺寸
四、相机如何选型
1. 明确应用需求
检测目标:尺寸、速度、精度、缺陷类型(如表面划痕、尺寸测量等)。
环境条件:光照(自然光/人工光源)、温度、振动、粉尘等。
输出要求:是否需要实时分析、数据存储或与其他设备(如PLC)通信。
2. 核心参数选型
(1) 分辨率
公式计算: 分辨率≥被测物尺寸/检测精度×安全系数。例如:检测10mm物体,要求0.05mm精度,需至少200万像素(1600×1200)。
(2) 传感器类型
全局快门(Global Shutter):适合高速运动物体(如流水线),避免拖影。
滚动快门(Rolling Shutter):静态或低速场景,成本低。
传感器尺寸:越大则通光量越高,但需匹配镜头像场。
(3) 帧率(FPS)
计算: 帧率≥产线速度/检测步长(单帧视野)。例如:产线速度1m/s,每帧视野10mm,则至少需100FPS。
高速场景:选择Camera Link或CoaXPress接口(如500FPS以上)。
(4) 像元尺寸
小像元(如1.4μm):高分辨率但低感光,需强光源。
大像元(如5.5μm):低照度表现好,适合弱光环境。
(5) 光谱响应
可见光(400-700nm):常规检测。
近红外(700-1000nm):穿透性检测(如硅片内部缺陷)。
紫外或X光:特殊材料分析。
3. 接口选择
接口类型 | 带宽 | 传输距离 | 典型应用 |
|---|---|---|---|
USB3.0 | 400MB/s | <5m | 低成本、中低速检测 |
GigE | 120MB/s | 100m | 远距离、多相机同步 |
Camera Link | 850MB/s | 10m | 高速、高分辨率 |
CoaXPress | 6.25GB/s | 100m+ | 超高速、4K/8K成像 |
5GigE/10GigE | 500MB/s~1GB/s | 100m | 平衡速度与距离需求 |
4. 镜头选型匹配
焦距计算: 焦距=工作距离×传感器尺寸/视野(FOV)
镜头类型: 远心镜头:高精度尺寸测量(无透视误差)。
FA镜头:通用场景,成本低。
变焦镜头:视野需频繁调整的场景。
5. 其他关键因素
动态范围(HDR):高对比度场景(如焊接检测)需100dB以上。
触发模式:硬件触发(光电传感器同步)或软件触发。
防护等级:IP67(防尘防水)适用于户外或恶劣环境。
软件支持:兼容Halcon、LabVIEW或定制SDK开发。
五、相机选型注意事项
1、相机类型
对于静止检测或者一般低速的检测,优先考虑面阵相机,对于大幅面高速运动或者滚轴等运动的特殊应用考虑使用线阵相机。根据检测的速度,选择相机的帧率一定要大于物体运动的速度,一定要在相机的曝光和传输时间内完成。而在实际检测中实现同样的目的可以有多种不同的解决办法,相机的选择也就有了更多空间。
2、相机帧率
相机的帧率决定着设备的测量效率,如相机的帧率是30FPS,则每秒钟最多拍摄30次。通常来说,相机的分辨率越低,同样的接口,帧率也会越高;而分辨率越高,帧率也会越低。帧率*分辨率≤总线带宽,即在接口一定(总线带宽已经确定),分辨率一定时,帧率也是有其最大值的。即要想相机的分辨率快,又要想相机的帧率高,那么就需要找更大带宽的总线,也就是相机的输出接口。
3、相机的曝光时间
相机的最小曝光时间,可以决定目标的运动速度。或者反过来说,目标的运动速度,对相机的最小曝光时间提出了要求。
假设我们的目标运动速度是1mm/S,我们的测量精度是0.01mm/pixel,那么我们必须考虑,物体的运动引起的拖影必须要小于我们的精度0.01mm,目标移动0.01mm,需要用时10ms,这就要求我们的相机的曝光时间必须小于10ms,如果大于这个曝光时间,那么仅仅物体运动引起的模糊就会大于0.01mm,这时我们的精度已经无法达到0.010.01mm/pixel了。
4、与镜头的匹配
传感器芯片尺寸需要小于或等于镜头的靶面尺寸,C 或CS 安装座也要匹配(或者增加转接口)。