STM32 外设驱动模块二:蜂鸣器模块
一、模块简介
蜂鸣器是一种常用于嵌入式系统中的声音输出设备,它能够通过简单的电平控制发出提示音或报警音。在 STM32 开发中,使用蜂鸣器可以实现诸如:
- 用户交互反馈(如按键音效)
- 异常状态报警(如传感器故障)
- 电源接通提示音
- 教学实验中声音输出示例
本文以 STM32F103 系列单片机为例,介绍如何使用标准库驱动 GPIO 控制蜂鸣器响/停,并通过实际代码案例讲解开发流程。
二、硬件原理分析
2.1 有源蜂鸣器的工作方式
蜂鸣器分为有源和无源两种:
- 有源蜂鸣器:内部自带震荡器,只需上电即可发声;
- 无源蜂鸣器:需外部提供频率信号(如 PWM)才会发声。
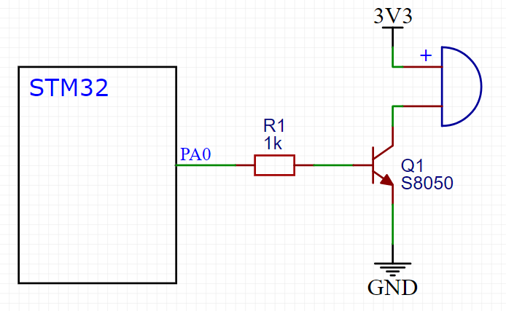
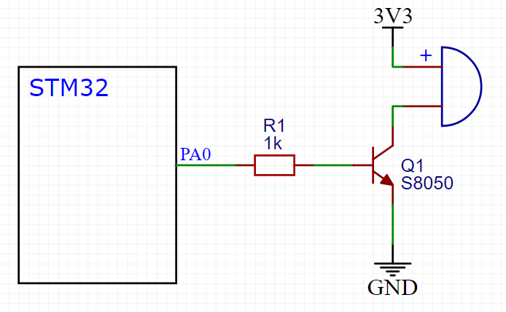
本实验采用有源蜂鸣器,控制方式为低电平有效:当 STM32 输出低电平时,蜂鸣器响;输出高电平时,蜂鸣器停止。
2.2 电路连接示意
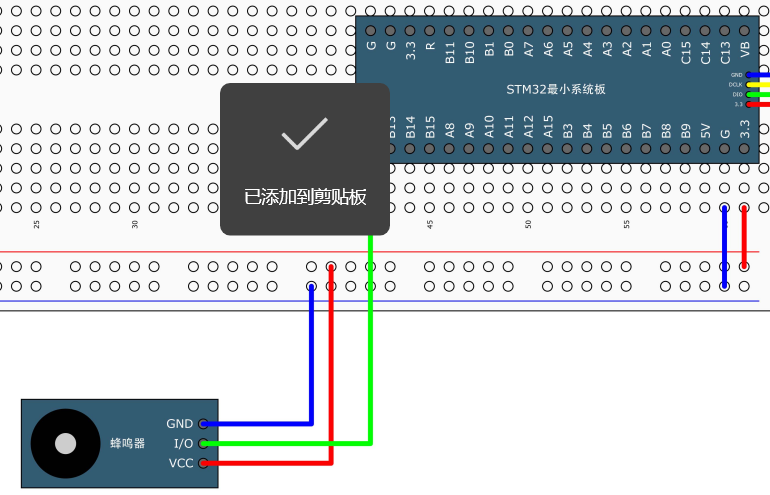
2.3 实物图

2.4 接线说明
📌 接线图预留处:
| 引脚功能 | STM32 引脚 | 模块引脚说明 |
|---|---|---|
| 控制引脚 | PB12 | IN(信号输入) |
| 电源 | 3.3V/5V | VCC |
| 地线 | GND | GND |
说明:
- 建议在控制信号线串联 100~330Ω 电阻以限流;
- 可并联 104 电容用于滤波,提升稳定性;
- 控制引脚推荐使用 GPIO 推挽输出模式。
三、软件实现与标准库代码详解
3.1 头文件包含
#include "stm32f10x.h" // 包含 STM32 标准库头文件
#include "Delay.h" // 延时函数头文件(需提前实现)
说明:
stm32f10x.h包含了寄存器定义与外设控制结构;Delay.h中封装了毫秒级延时函数,在主循环中用于控制蜂鸣器响/停时长。
3.2 初始化 GPIO 口控制蜂鸣器
void Buzzer_Init(void) {// 1. 开启 GPIOB 外设时钟,否则后续 GPIO 操作无效RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);// 2. 配置 PB12 为推挽输出GPIO_InitTypeDef GPIO_InitStructure; // 定义 GPIO 初始化结构体GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 设置为推挽输出模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; // 指定使用 PB12 引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 设置输出速率为 50MHzGPIO_Init(GPIOB, &GPIO_InitStructure); // 应用配置初始化 PB12
}
说明:
- 推挽输出可直接驱动蜂鸣器模块;
- 必须启用 GPIO 时钟,否则初始化无效;
- 建议使用高速输出,确保控制响应及时。
3.3 控制蜂鸣器响/停函数
void Buzzer_On(void) {GPIO_ResetBits(GPIOB, GPIO_Pin_12); // 设置引脚为低电平,有源蜂鸣器开始鸣叫
}void Buzzer_Off(void) {GPIO_SetBits(GPIOB, GPIO_Pin_12); // 设置引脚为高电平,蜂鸣器停止发声
}
说明:
GPIO_ResetBits()表示设置引脚输出低电平;GPIO_SetBits()表示设置引脚输出高电平;- 本模块为低电平有效,即低电平响,高电平停。
3.4 主函数循环控制示例
int main(void)
{Buzzer_Init(); // 初始化蜂鸣器控制引脚while (1){Buzzer_On(); // 蜂鸣器鸣叫Delay_ms(100); // 延时100msBuzzer_Off(); // 蜂鸣器停止Delay_ms(100); // 延时100msBuzzer_On(); // 再次鸣叫Delay_ms(100); // 延时100msBuzzer_Off(); // 停止发声Delay_ms(700); // 延时700ms,形成节奏感}
}
说明:
- 使用延时函数控制蜂鸣器鸣叫时间间隔;
- 可通过修改延时参数,制作不同节奏的提示音;
- 实际应用中可结合传感器、按键状态触发蜂鸣器。
四、功能拓展建议
| 功能拓展 | 实现方式说明 |
|---|---|
| 状态报警 | 结合传感器判断阈值后响铃(如烟雾报警) |
| 按键反馈 | 用户按键时发短促鸣叫,增强交互体验 |
| 音效节奏 | 调整鸣叫/延时参数组合不同节奏 |
| PWM 控制音调 | 无源蜂鸣器时,可用 TIM 产生 PWM 控制 |
五、调试建议与常见问题
| 问题现象 | 原因排查与解决建议 |
|---|---|
| 蜂鸣器无声 | 检查 GPIO 是否输出低电平,电路是否接反 |
| 蜂鸣器持续响 | 程序中未及时拉高电平或陷入死循环 |
| 编译出错 | 是否正确引入头文件 / 宏定义是否开启 |
| 延时无效或报错 | Delay.h 中是否正确实现毫秒延时函数 |
| 程序下载无响应 | 是否电源接反 / 电压不足 / BOOT 设置错误 |
六、实用提示
- 建议将蜂鸣器控制逻辑封装成函数模块,便于调用;
- 可与 LED 显示、串口调试联动,形成完整的提示系统;
- 若后续使用无源蜂鸣器,需改用定时器输出 PWM 以形成不同频率控制音调。
七、结语
蜂鸣器模块是 STM32 外设学习中最基础也最直观的模块之一。通过 GPIO 控制高低电平即可完成响/停控制,非常适合用于新手教学、系统调试和功能提示。
掌握蜂鸣器模块的控制方式,不仅有助于构建完整的交互系统,也为后续开发如按键反馈、异常报警、定时提示等功能打下坚实基础。