《人形机器人的觉醒:技术革命与碳基未来》——类人关节设计:气动人工肌肉PAM及其对材料技术要求与限制
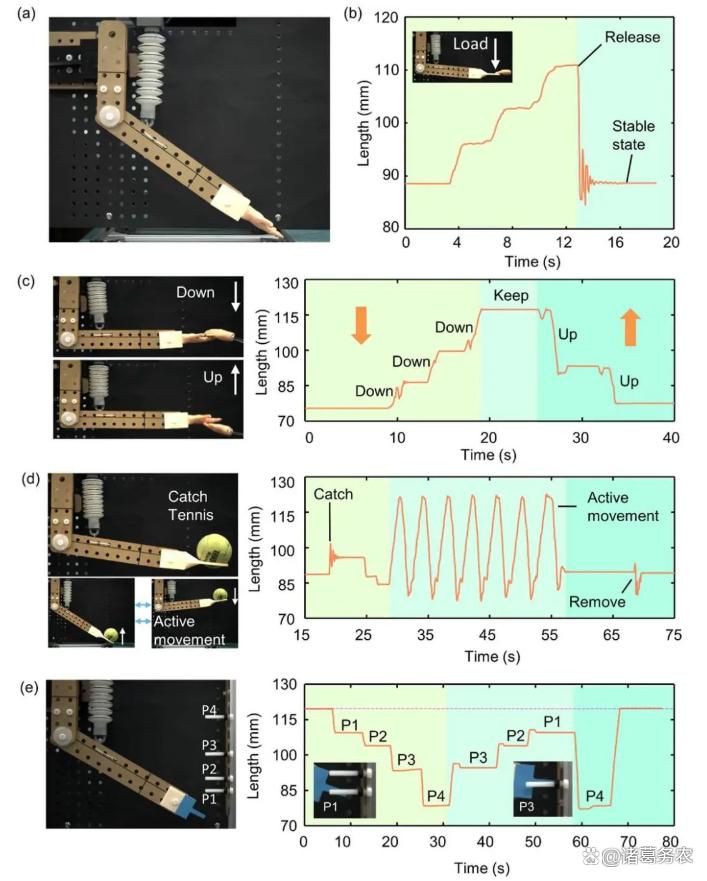
基于SSAM驱动的仿生手臂及其控制效果
一、气动人工肌肉的组成结构和性能特征
(一)组成与结构形式
1. 核心组件
弹性内胆:材料采用硅胶、天然橡胶或聚氨酯等柔性材料;主要功能在于密封气体,受压时径向膨胀。
约束层:采用高强度纤维编织网(如凯夫拉或尼龙),以螺旋或网状包裹内胆。主要作用是限制径向膨胀,将气压转化为轴向收缩力(类似生物肌肉的筋膜)。
端部接头:金属/聚合物接口,用于连接气源和负载(如机械臂关节)。
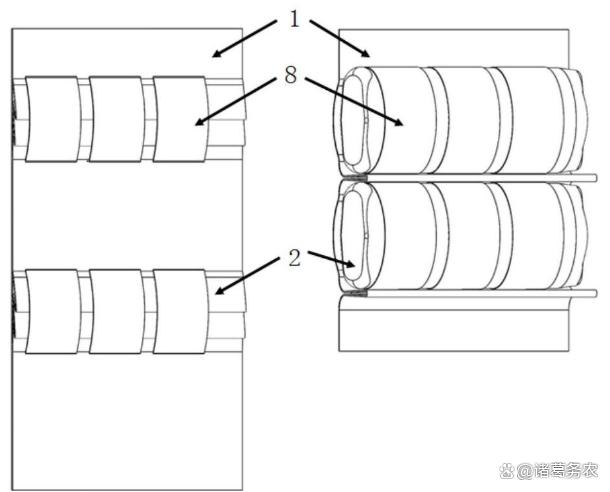
2. 典型结构形式
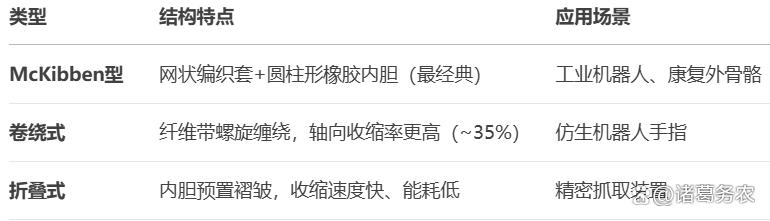
气动人工肌肉典型结构形式和应用场景
(二)工作原理
1. 充气过程:
压缩气体注入内胆 → 内胆径向膨胀 → 编织网束缚膨胀 → 网纤维角度变化 → 内胆轴向缩短(产生收缩力)。力学模型:收缩力

P:气压,D_0:初始直径,θ:编织网纤维与轴线的夹角。
放气过程:气体排出 → 内胆弹性回缩 → 肌肉恢复原长(被动伸展,依赖外部负载或拮抗肌)。
关键机制:编织网的几何约束是力转换的核心——气压增大时 θθ 减小,轴向力显著提升(非线性力-位移关系)。
(三)性能特征

气动人工肌肉性能特征
(四)气动人工肌肉对比其他驱动技术的优势

气动人工肌肉对比其他驱动技术的优势
(五)总结:前沿优化方向
1. 结构创新:
仿生编织网:模仿肌肉纤维排列(如斜向编织),提升收缩效率(韩国KAIST团队将应变率提升至40%)。
可变刚度设计:充气同时调节纤维张力,实现刚/柔模式切换(苏黎世联邦理工学院)。

仿生水凝胶
2. 材料升级:
自愈合橡胶:微胶囊修复剂嵌入内胆,延长寿命(MIT实验寿命提升300%)。
智能涂层:石墨烯涂层实时监测应变和压力(德国Festo公司)。
3. 集成化气源:
微型压缩泵:压电陶瓷驱动,集成到肌肉内部(哈佛微型机器人已应用)。
4. 结论
气动人工肌肉凭借高功率密度、本质柔顺性和环境鲁棒性,在机器人、医疗康复领域不可替代。尽管受限于气源依赖性和滞后效应,但通过仿生结构设计(如优化编织角度)与新型材料(自愈合聚合物),其性能边界持续突破。未来与软体传感技术结合(如电子皮肤嵌入),有望成为新一代协作机器人的核心驱动方案。
二、气动人工肌肉的比较优势及在人形机器人中应用前景
气动人工肌肉(Pneumatic Artificial Muscles, PAM)凭借其仿生特性和高动态性能,已成为人形机器人驱动方案的重要选项。
(一)比较优势:软体驱动的核心竞争力
1. 高功率密度与爆发力
功率密度达 200–400 W/kg,远超传统电机(100–150 W/kg),尤其适合跳跃、快速蹲起等爆发动作。波士顿动力Atlas的后空翻动作即依赖PAM的高瞬时出力。
输出力范围广(100 N–15 kN),通过增大直径或气压即可线性提升负载能力,适配不同关节需求。
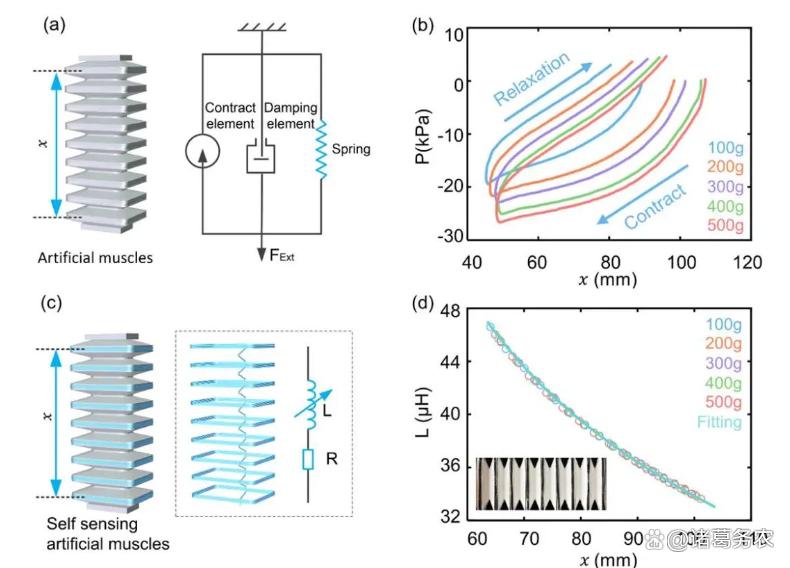
SSAM驱动与传感等效模型及特性a为PAM
2. 本质柔顺性与安全性
气体可压缩性赋予PAM天然弹性,碰撞时自动屈服,降低人机交互风险。例如Protoclone机器人的1000余块气动肌肉使其动作流畅且具备类人缓冲特性。
过载保护机制:气压超限时编织网滑移,避免机械损坏,延长寿命。
3. 轻量化与环境适应性
核心材料为橡胶/凯夫拉纤维,重量显著低于金属电机。宇树G1机器人(35 kg)的关节轻量化设计部分受益于气动执行器。
耐潮湿、粉尘和电磁干扰,适用于工业、户外等复杂场景,优于电机系统。
4. 成本与维护优势
结构简单,材料成本低。波兰Protoclone通过模块化肌纤维(Myofiber)降低制造成本,目标定价面向家庭服务市场。
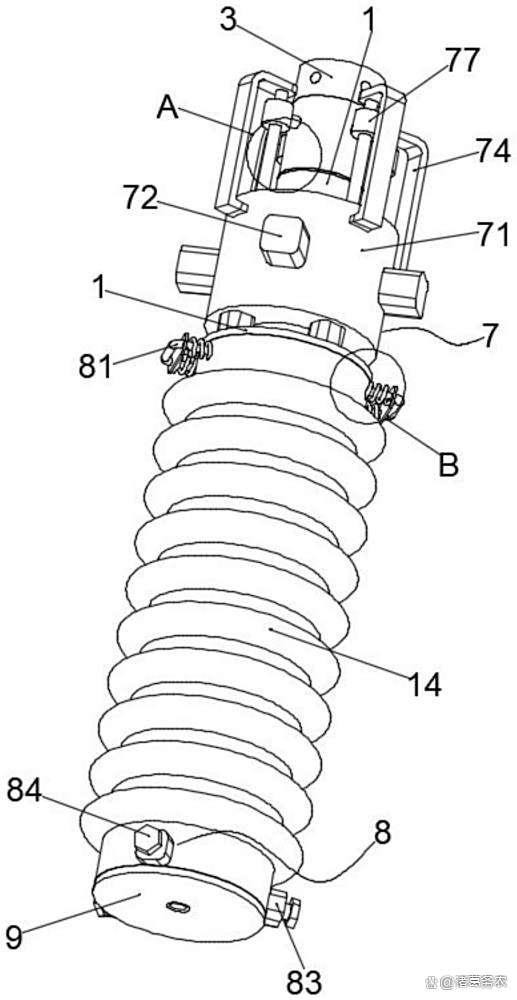
用于下肢外骨骼机器人的气动人工肌肉
(二)主要不足:技术瓶颈与商业化挑战
1. 气源依赖于系统笨重
需空压机、阀组和管路,导致整体系统体积庞大。Atlas早期液压版本因噪音和能耗问题转向电机驱动,但气动方案仍在特定场景保留。
2. 控制复杂性
滞后效应:充/放气路径的力-位移曲线不重合,定位精度仅±5%(电机可达±0.1°)。
非线性响应:收缩力受编织角度、气压、负载耦合影响,需高复杂度控制算法补偿。
3. 密封与耐久性问题
橡胶内胆长期使用易老化漏气。MIT提出自愈合橡胶(微胶囊修复剂)可将寿命提升300%,但尚未大规模应用。
4. 能效限制
系统效率约30–50%,低于电机(>80%),能量损耗主要来自气体压缩和管路摩擦。
一种非对称袋式气动人工肌肉
(三) 应用现状:典型机器人中的技术渗透
1. 技术渗透
下表对比主流人形机器人中PAM的应用特点:
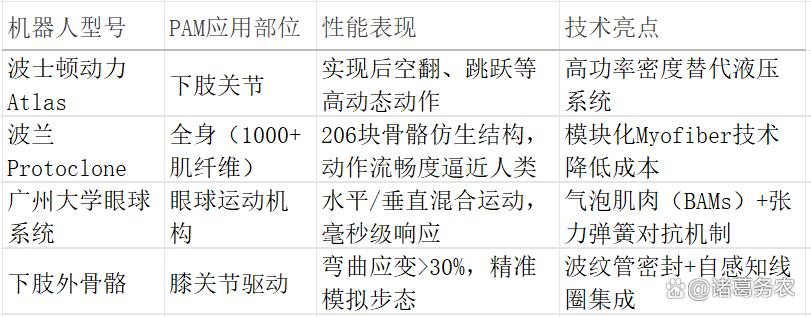
主流人形机器人中气动人工肌肉应用特点
2. 实验室创新:
中国科大开发 自感知PAM(SSAM),集成互感线圈实现0.01 mm长度分辨率,用于仿蚯蚓机器人实时调整步态。
3. 量产进程:
2025年人形机器人进入“量产元年”,但PAM因气源限制主要应用于特定部件(如眼球、手指),全身驱动仍以电机为主(如特斯拉Optimus)。
(四)变化趋势:技术融合与轻量化突破
1. 自感知技术集成
中国科大SSAM通过多段线圈实现肌肉长度实时监测,消除滞后误差,未来将扩展至力-位混合控制。Festo的智能涂层(石墨烯)可同步监测应变与压力,提升闭环控制精度。
2. 结构创新提升性能
双曲面PAM(h-PAM):东北大学设计双曲面橡胶管+直纤维编织层,短肌肉收缩率提升40%,适用于紧凑关节。
平面卷曲制造:上海交大仿肌纤维阵列PAM,通过选择性驱动气球实现弯曲/扭转多模态运动,拓展灵巧操作场景。
3. 混合驱动系统
PAM+电机互补:Optimus Gen 2在肩/髋部用旋转电机(大角度旋转),膝/肘用线性执行器(低功耗),兼顾效率与爆发力。
PAM+SMA:实验阶段结合形状记忆合金(SMA)的高力输出与PAM的快速响应,提升综合能效。
4. 材料轻量化与系统微型化
超高分子量聚乙烯纤维:恒辉安防研发的轻量化腱绳(密度<1 g/cm³)用于灵巧手传动,减重30%。
集成气源:哈佛微型机器人内置压电陶瓷气泵,消除外部管路,提升便携性。

三维打印人造肌肉
(五)小结:柔性驱动的不可替代性与演进路径
气动人工肌肉凭借高功率密度、本质安全性和仿生适配性,在情感交互(如眼球)、高动态动作(如跳跃)及人机共融场景中具不可替代性。然而,气源依赖和滞后效应制约其全面推广。未来突破将聚焦:
短中期:通过自感知技术(如SSAM)和混合驱动(PAM+电机/SMA)提升控制精度;
长期:依托可降解弹性体(如纤维素基材料)和微型化气源(压电泵)实现系统革新。
随着人形机器人向家庭服务、医疗康复领域渗透,PAM的“柔性特质”将成为突破刚性机器边界的关键支点,推动具身智能向生物兼容性演进。
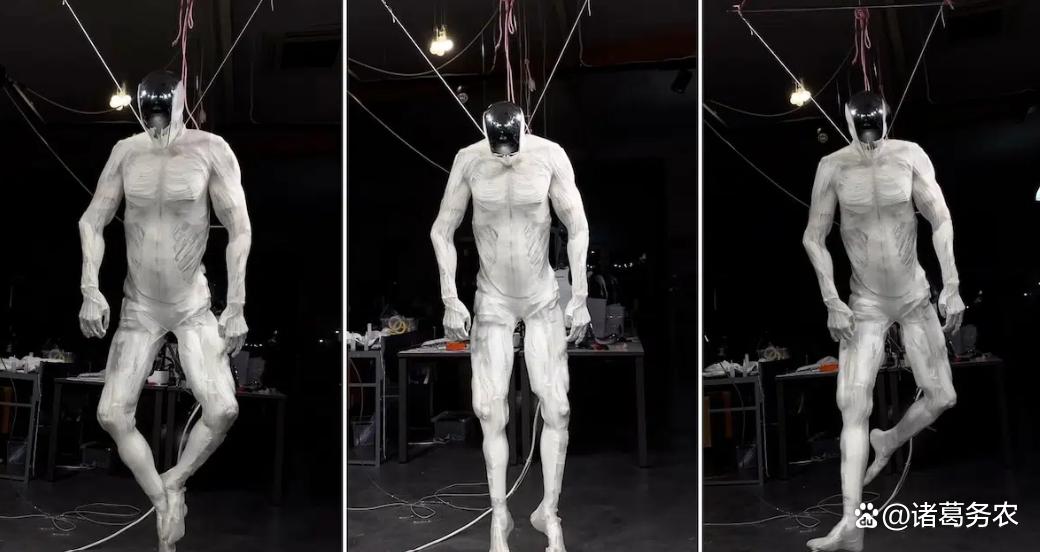
模仿人体解剖结构的人形机器人
三、气动人工肌肉涉对所用材料性能的具体要求
气动人工肌肉(Pneumatic Artificial Muscles, PAM)的性能高度依赖材料技术,其核心组件需满足特定力学、化学及耐久性要求。
(一)核心材料分类及性能要求
1. 弹性内胆(密封与形变主体)
常用材料有硅橡胶(PDMS)、天然橡胶(NR)和热塑性聚氨酯(TPU)。PDMS生物相容性好,耐温范围广(-50~200℃);NR高弹性(断裂伸长率>800%),低滞后损耗;TPU耐磨性强,可3D打印成型。性能要求:

弹性内胆对材料性能的具体要求与影响
2. 约束层(力传递与几何限制)
常用材料有高强度合成纤维和金属微丝编织网。金属微丝编织网由钛合金丝编织而成,耐腐蚀,适合医疗植入场景。高强度合成纤维有凯夫拉(Kevlar),抗拉强度≥3.6 GPa,密度1.44 g/cm³(轻量化首选);还有超高分子量聚乙烯(UHMWPE),强度同凯夫拉,密度仅0.97 g/cm³(恒辉安防用于减重腱绳)。性能要求:

PAM约束层对材料性的要求与限制
3. 端部接头与密封件
材料:金属接头用7075铝合金(强度/重量比优)、316L不锈钢(耐腐蚀);动态密封环一般采用氟橡胶(FKM,耐油耐高温)或全氟醚橡胶(FFKM,超低渗透性)等。
要求:密封件压缩永久变形率<20%(ASTM D395标准),保障10⁷次循环密封性。
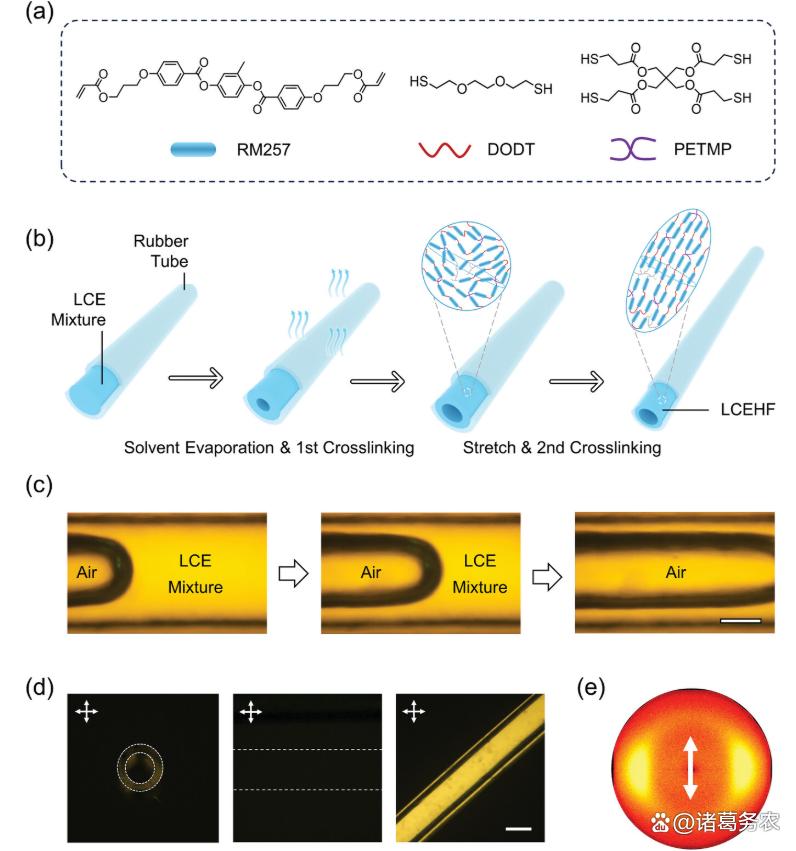
液晶弹性体中空纤维作为人工肌肉
(二)材料性能对PAM的关键影响
1. 失效模式与材料解决方案
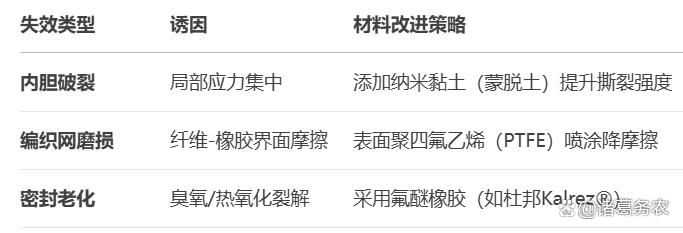
PAM失效模式与材料解决方案
2. 性能边界突破案例
高应变率需求:韩国KAIST团队开发 双曲面PAM(h-PAM),采用预拉伸TPU内胆+凯夫拉斜向编织(55°角),轴向收缩率提升至40%(传统McKibben型仅25%)。
快速响应优化:上海交大使用 超薄硅胶(50 μm)+ 直织UHMWPE纤维,响应时间缩短至30 ms(标准型>50 ms)。
四、气动人工肌肉材料技术进展及材料技术的局限性
近年来,材料科学的发展显著提升了PAM的驱动效率、环境适应性和功能集成度,但仍存在诸多瓶颈。
(一)气动人工肌肉材料技术的关键进展
1. 高性能弹性体开发
热塑弹性体(TPU/TPE):西安工程大学研发的分腔式气囊单元采用TPU材料,通过独立腔室气压控制实现多自由度运动(弯曲、扭转),解决了传统模块拼接的冗余体积问题,同时提升响应速度和可靠性。
自愈合硅橡胶:MIT团队在硅胶内胆中嵌入双环戊二烯(DCPD)微胶囊,破裂后可修复划痕,寿命提升300%;动态键合橡胶(如呋喃-马来酰亚胺体系)通过加热实现可逆交联修复。
2. 智能复合材料与结构创新
凯夫拉/超高分子量聚乙烯(UHMWPE):北华大学实验表明,UHMWPE纤维(密度0.97 g/cm³)较传统尼龙减重30%,抗拉强度>3.6 GPa。
碳纤维-TPU混编:苏黎世联邦理工学院开发的混编约束层,抗拉强度达4.2 GPa,适用于高负载关节。
石墨烯/碳纳米管涂层:Festo将石墨烯涂层应用于内胆表面,实现应变监测(精度±0.5%),同时降低摩擦损耗。
3. 仿生纤维约束层:
双曲面结构(h-PAM):东北大学设计双曲面橡胶管+直纤维编织层,收缩率提升至40%(传统McKibben型仅25%),适用于紧凑空间。
4. 先进制造工艺突破
3D打印一体化成型:意大利理工学院利用软树脂一次打印18个GRACE执行器组成的气动手,重量100克,可支撑超自身1000倍的重量,实现手指弯曲、手腕扭转等多模态运动。
冰模板仿生结构:澳门大学“同心冰模板法”制备环向纤维水凝胶,含水量85%下抗压强度提升3倍,适用于水下驱动器和伪装机器人。
5. 多功能集成技术
自感知线圈(SSAM):中国科大在波纹管结构中集成多段互感线圈,实现0.01 mm长度分辨率,消除滞后误差,应用于仿蚯蚓机器人的实时步态调整。
热-气协同驱动:清华大学开发的液晶弹性体中空纤维(LCEHF)结合热与气动刺激,收缩率达50%(单一刺激仅27-42%),响应速度提升3700倍,模拟人体二头肌运动。
(二)限制性能的材料与技术瓶颈
1. 弹性体材料的固有缺陷
气体渗透与密封失效:硅橡胶气体渗透系数>10⁻¹² cm³·cm/cm²·s·Pa,长期使用导致气压维持困难;氟橡胶(FKM)虽渗透率低,但弹性模量过高(>20 MPa),限制形变能力。
滞后与蠕变:天然橡胶滞后损耗>15%,充/放气路径力-位移曲线分离,控制精度下降±5%;TPU在循环载荷下蠕变率>2%,影响尺寸稳定性。
耐疲劳性不足:传统硅胶寿命仅10⁴-10⁵次循环(应变30%),远低于机器人关节的10⁸次需求。
2. 约束层材料的摩擦与磨损
凯夫拉纤维与橡胶界面摩擦系数>0.2,导致编织网滑移能耗增加20%;长期摩擦引发纤维断丝,约束失效。
金属微丝编织网(如钛合金)虽抗蠕变,但重量密度>4 g/cm³,抵消气动肌肉的轻量化优势。
3. 感知-驱动集成难度
传统应变传感器仅响应拉伸形变,无法监测收缩;嵌入导线增加刚性,破坏PAM的柔顺性。
4. 制造工艺限制
硅胶浇铸易产生气泡,良品率<70%;3D打印软树脂的层间结合强度低,易分层开裂。
(三)理想材料的性能特征与设计原则
1. 理想材料性能特征
为实现接近生物肌肉的驱动性能,理想PAM材料需满足以下多维要求:

PAM理想材料性能特征
2. 理想材料体系设计原则:
梯度复合结构:内胆采用“硬-软”渐变设计(如3D打印TPU/PLA梯度材料),接头区域模量>100 MPa,主体区域模量<1 MPa,减少应力集中。
仿生纤维排布:模仿肌纤维环向排列(如澳大水凝胶的同心纤维),提升径向抗爆压能力(爆破压>1 MPa)。
多刺激响应机制:如LCEHF的热-气协同效应,利用相变与取向转变叠加,突破单一刺激的性能极限。
(四)前沿新材料探索和技术创新
1. 生物融合材料
可降解弹性体:聚己内酯(PCL)/聚乳酸(PLA)共混体系,降解周期可控(30-180天),用于植入式医疗机器人。
细胞驱动复合体:哈佛大学“鳐鱼机器人”采用工程化心肌细胞+水凝胶支架,实现自主收缩。
水凝胶-PAM复合体:浙大仿水母肌肉实现83.3%含水量,驱动电压<1 kV。
2. 纳米增强与自感知智能响应
光热驱动涂层:金纳米棒掺杂硅胶(清华大学),近红外光触发局部形变,实现无线控。
液晶弹性体纤维:轴向排列LCE中空纤维实现50%收缩率,响应速度比纯气动提升3700倍。
石墨烯/碳纳米管涂层:涂覆于内胆表面,电阻应变灵敏度(GF)>50,实时监测形变(Festo实验精度±0.5%应变)。
压电聚合物(PVDF)薄膜:嵌入编织层,将机械能转为电信号,实现无源力传感。
3. 可持续制造技术
天然橡胶替代:蒲公英橡胶(Taraxacum kok-saghyz)提取,降低石油依赖。
回收再造工艺:欧盟CircularPAM项目热解回收碳纤维,重制约束层,成本降低40%。
4. 微型化与集成系统
压电陶瓷气泵:哈佛微型机器人内置压电泵(尺寸<1 cm³),消除外部管路。
摩擦纳米发电机(TENG):将机械能转为电能,驱动DEA实现无限续航(仿生水母方案)。
3D打印梯度材料:硬质接头向软质内胆的模量渐变结构,减少应力集中(惠普MJF技术已实现)。
光热响应涂层:金纳米棒掺杂硅胶,近红外光触发局部形变,实现无线驱动。
5. 自愈合材料:
微胶囊修复剂:MIT团队在硅胶内胆中嵌入双环戊二烯(DCPD)微胶囊,破裂后释放修复剂,寿命提升300%。
动态键合橡胶:基于Diels-Alder键的可逆交联网络(如呋喃-马来酰亚胺体系),80℃加热5分钟修复划痕。
6. 新一代约束层材料:
轻质高性能纤维

用作PAM约束材料的高性能纤维
7. 环境适应性材料——极端工况适配:
耐低温橡胶:氢化丁腈橡胶(HNBR,-50℃保持弹性),用于极地探测机器人。
抗辐照涂层:聚酰亚胺(PI)包覆层,耐受太空UV辐射(国际空间站测试)。
8. 可持续性革新
天然橡胶替代:蒲公英橡胶(Taraxacum kok-saghyz)提取,减少石油依赖。
回收增强技术:废弃PAM经热解回收碳纤维,重制约束层(欧盟CircularPAM项目)。
(五)总结
气动人工肌肉的材料技术正从被动形变向智能响应-自愈合-环境自适应演进。短期突破在于纳米复合弹性体(如石墨烯/TPU)与仿生约束结构(环向纤维水凝胶、双曲面编织);长期需解决气源微型化(压电泵集成)与生物兼容性(可降解材料)。未来突破取决于:
高分子合成:定制化弹性体(如拓扑结构优化橡胶);
纳米复合:石墨烯/碳管增强界面性能;
仿生设计:模仿肌筋膜层级结构(如胶原纤维取向)。
通过材料-结构-制造协同创新,PAM有望在应变率(>50%)、寿命(>10⁸次)及系统集成度上跨越瓶颈,为人形机器人提供更接近生物肌肉的驱动解决方案。
【免责声明】本文主要内容均源自公开信息和资料,部分内容引用Ai,仅作参考,不作任何依据,责任自负。