自动驾驶中的传感器技术19——Camera(10)
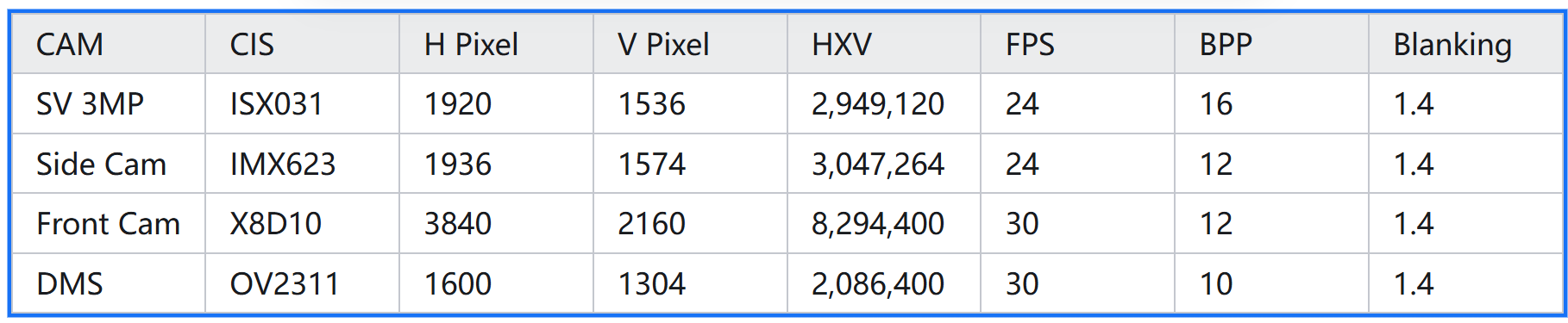
自动驾驶摄像头图传的数据率计算案例
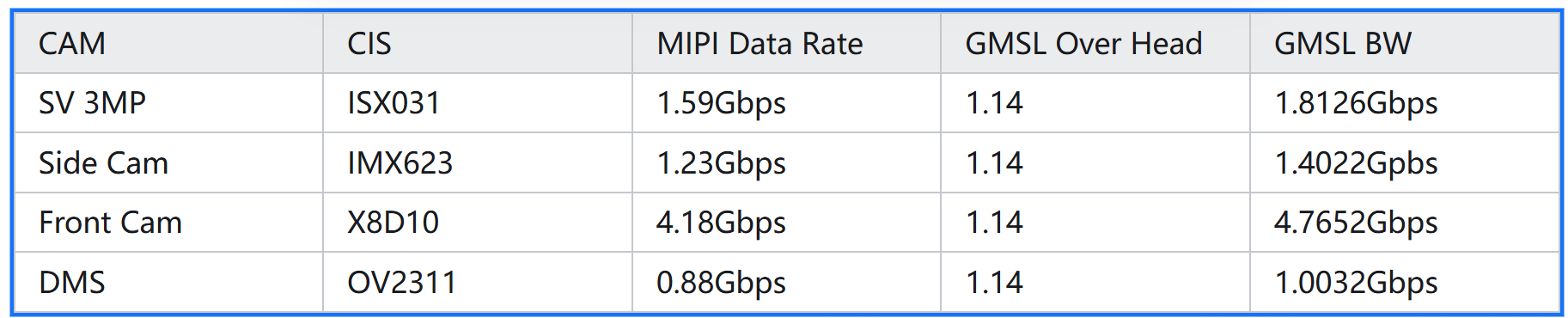
HPixel*VPixel*FPS*BPP*Blanking=MIPI data rate
HPixel*VPixel*FPS*BPP*Blanking*GMSLoverhear=GMSL BW
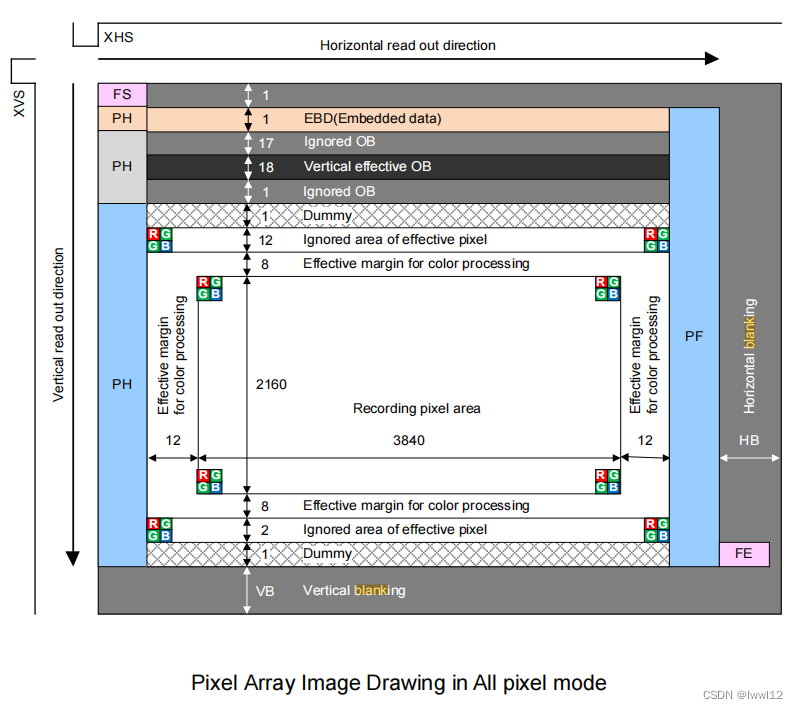
Horizontal Blanking:行消隐或者水平消隐,两行之间的间隔。
Vertical Blanking:场消隐或者垂直消隐,从上一帧到下一帧的间隔。
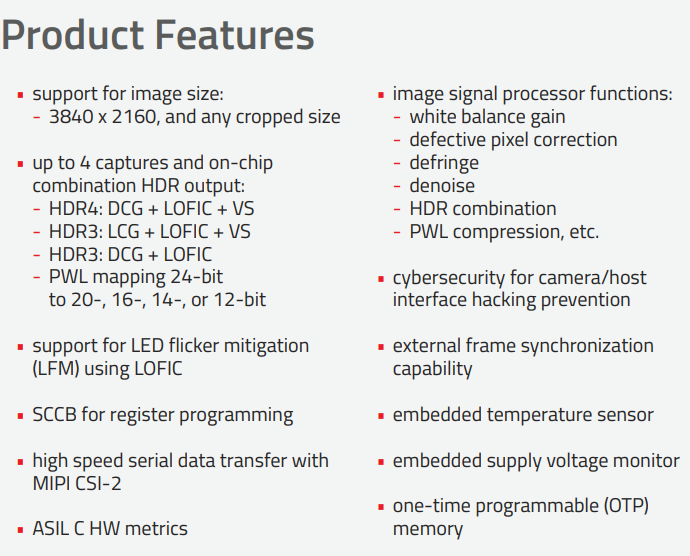
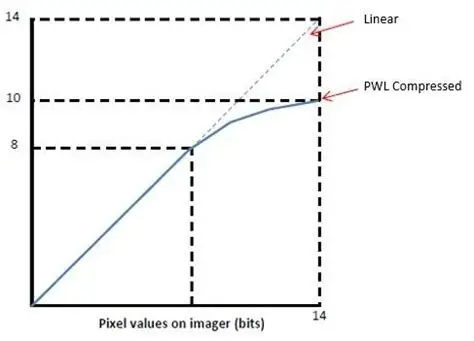
以上有疑问的是BPP,为什么Bit per pixel不是24,是由于CIS采用了PWL Compression 后才输出的,另外注意,RAW和RGB的BPP是不同的。