机器人产业需要技术与资本双驱动,在泡沫期中探索商业化路径
机器人行业生态与商业化路径
踏入AI硬件这个赛道快三个月了,接触了许许多多的资源,感谢宋老师带我,感谢一支烟花AI社区,后续多多更新内容
今天会来分享一下关于闭门会的内容
生态位构建策略:
头部企业通过多业务线布局生态,比如全尺寸人形机器人、轮式本体开发(侧重仿真场景与物理模型)及C端品牌运营,形成技术沉淀与市场拓展的双轨模式。
商业化关键要素:
首先要突破技术先行思维,优先匹配场景需求(如家政、工业检测),同时构建用户粘性(如IP打造、情感陪伴)与高效运营体系
目前的发展,长期来看,它最终能够留下来,可能更多的是它自己的一种IP。
参考大疆从无人机硬件到影像生态的转型路径。大疆其实慢慢脱离无人机硬件了,更多转向摄影类
大疆pocket3就是一个非常好的例子,产品垂直、人群切入精准,小而精,并且带动了不少其他产业,比如租赁大疆!
品牌突破行业瓶颈就是扩展新市场的尖刀
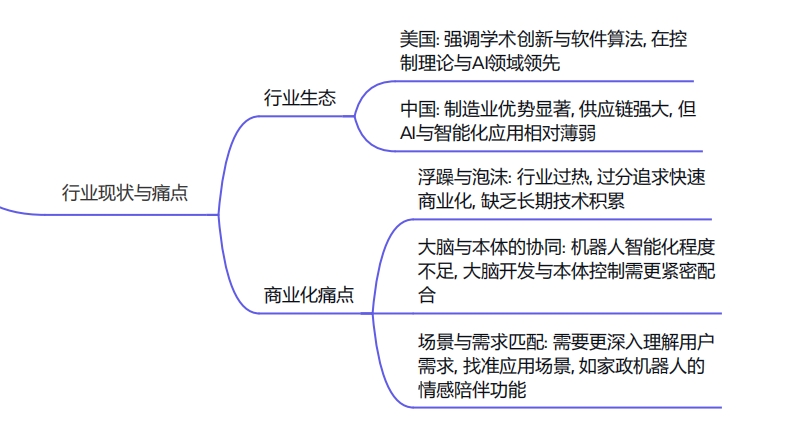
中美行业差异与技术发展
技术路径差异:
美国侧重软件算法创新(比如基于Foundation Model的控制策略、物理引擎底座研发)
国内依托制造业优势推动硬件迭代,但存在技术效仿与宣传超前现象,核心零部件(如电机、减速器)仍需突破。
产学研转化对比:
美国学术界与产业界结合紧密,教授主导概念创新并深度相信技术愿景
国内企业多处于技术整合阶段,依赖海外人才,需要加强底层技术(如端到端操作系统)自主研发。
行业痛点与未来趋势
当前发展瓶颈:
存在技术泡沫与浮躁心态
表现为过度依赖Demo宣传、投融资驱动明显,
机器人“大脑”(如感知、记忆能力)与“本体”(如操作精度)协同不足,通用化能力待提升。
现在大家争先恐后地秀一些视频,可能更多的是出于投融资考虑
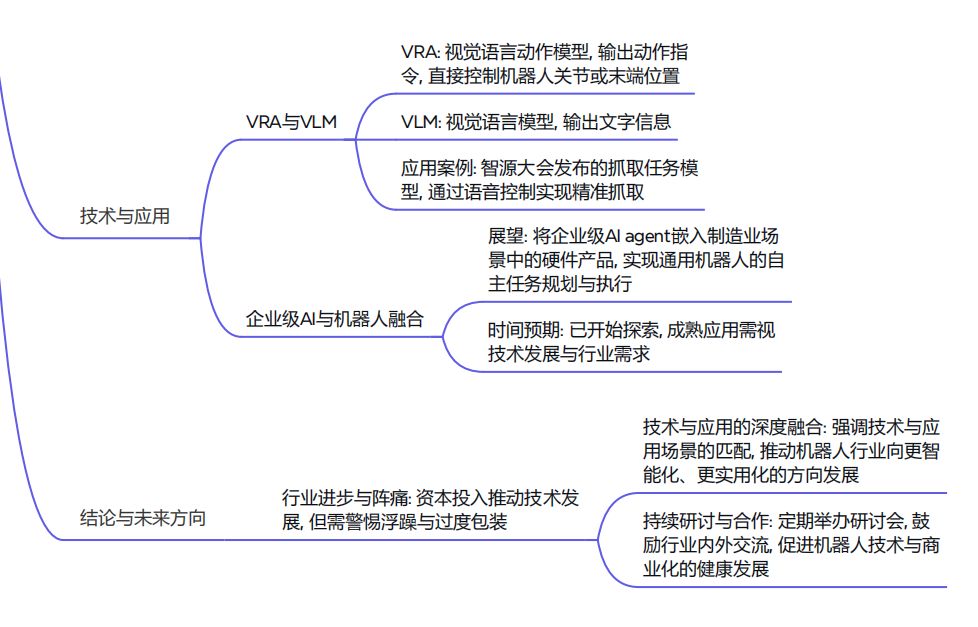
未来突破方向:
需要推动VRM/VLA技术落地,实现上层大模型与下层动作专家的融合
探索企业级AI Agent与硬件结合的场景(如制造业任务自主规划)
同时反向拉动上游供应链(如高精度传感器、轻量化机械臂)升级。