Mujoco(MuJoCo,全称Multi - Joint dynamics with Contact)一种高性能的物理引擎
Mujoco(MuJoCo,全称Multi - Joint dynamics with Contact)是一种高性能的物理引擎,主要用于模拟多体动力学系统,广泛应用于机器人仿真、运动学研究、人工智能等领域。以下是关于Mujoco仿真的一些详细介绍:
1. 基本原理
- 多体动力学 :Mujoco基于多体动力学理论,能够精确地模拟多个刚体之间的运动和相互作用。它通过牛顿 - 欧拉方程来描述每个刚体的运动状态,包括位置、速度、加速度等,并考虑了刚体之间的约束关系,如关节连接、接触碰撞等。
- 碰撞检测与处理 :Mujoco具备高效的碰撞检测算法,能够实时检测物体之间的碰撞,并根据物理定律计算碰撞后的运动状态。它支持多种碰撞模型,如弹性碰撞、非弹性碰撞等,可以根据实际需求进行选择和调整。
- 数值积分方法 :为了求解动力学方程,Mujoco采用了数值积分方法。常用的积分方法有欧拉法、龙格 - 库塔法等。这些方法通过离散化时间步长,逐步计算系统在每个时间点的状态,从而实现对连续运动过程的模拟。
2. 主要功能
- 模型构建 :Mujoco支持用户通过XML文件定义仿真模型,包括刚体的形状、尺寸、质量、惯性张量等属性,以及关节的类型、位置、限制等信息。用户可以构建复杂的机器人模型、机械装置模型等。
- 传感器仿真 :Mujoco提供了多种传感器的仿真功能,如位置传感器、速度传感器、力传感器等。这些传感器可以实时获取仿真模型的状态信息,为控制算法提供反馈。
- 控制器接口 :Mujoco提供了与外部控制器的接口,用户可以编写自己的控制算法,并将其与仿真模型进行连接。通过控制器接口,用户可以实现对仿真模型的精确控制,如关节位置控制、力矩控制等。
- 可视化功能 :Mujoco具备强大的可视化功能,能够实时显示仿真模型的运动过程。用户可以通过调整视图角度、缩放比例等操作,清晰地观察模型的运动状态。此外,Mujoco还支持将仿真结果保存为视频文件,方便后续分析和展示。
3. 应用场景
- 机器人仿真 :Mujoco在机器人仿真领域得到了广泛应用,如机器人的运动规划、路径规划、抓取操作等。通过仿真,可以在虚拟环境中对机器人进行测试和优化,减少实际机器人实验的成本和风险。
- 运动学研究 :在运动学研究中,Mujoco可以用于模拟生物体的运动,如人体运动、动物运动等。通过对生物体运动的仿真,可以深入研究其运动机制和力学特性,为运动学理论的发展提供支持。
- 人工智能训练 :Mujoco被广泛应用于人工智能领域的强化学习训练。通过构建虚拟环境和仿真模型,为智能体提供训练场景,使其能够在虚拟环境中学习和优化策略,从而提高智能体的性能和适应性。
4. 优势与局限性
-
优势
- 高效性 :Mujoco采用了先进的算法和优化技术,能够快速地进行动力学计算和碰撞检测,保证了仿真的实时性和高效性。
- 精确性 :基于严格的物理定律和动力学模型,Mujoco能够精确地模拟多体系统的运动和相互作用,为科学研究和工程应用提供了可靠的仿真结果。
- 灵活性 :用户可以通过XML文件灵活地定义仿真模型和参数,支持多种传感器和控制器接口,能够满足不同用户的需求。
-
局限性
- 仅支持刚体动力学 :Mujoco主要专注于刚体动力学的模拟,对于软体物体、流体等的模拟能力较弱。如果需要模拟这些复杂的物理现象,可能需要结合其他专门的仿真工具。
- 学习曲线较陡 :Mujoco的使用需要一定的物理和数学基础,用户需要熟悉多体动力学理论和数值计算方法。此外,其XML模型定义方式也相对复杂,需要一定的学习时间来掌握。
5. 使用示例
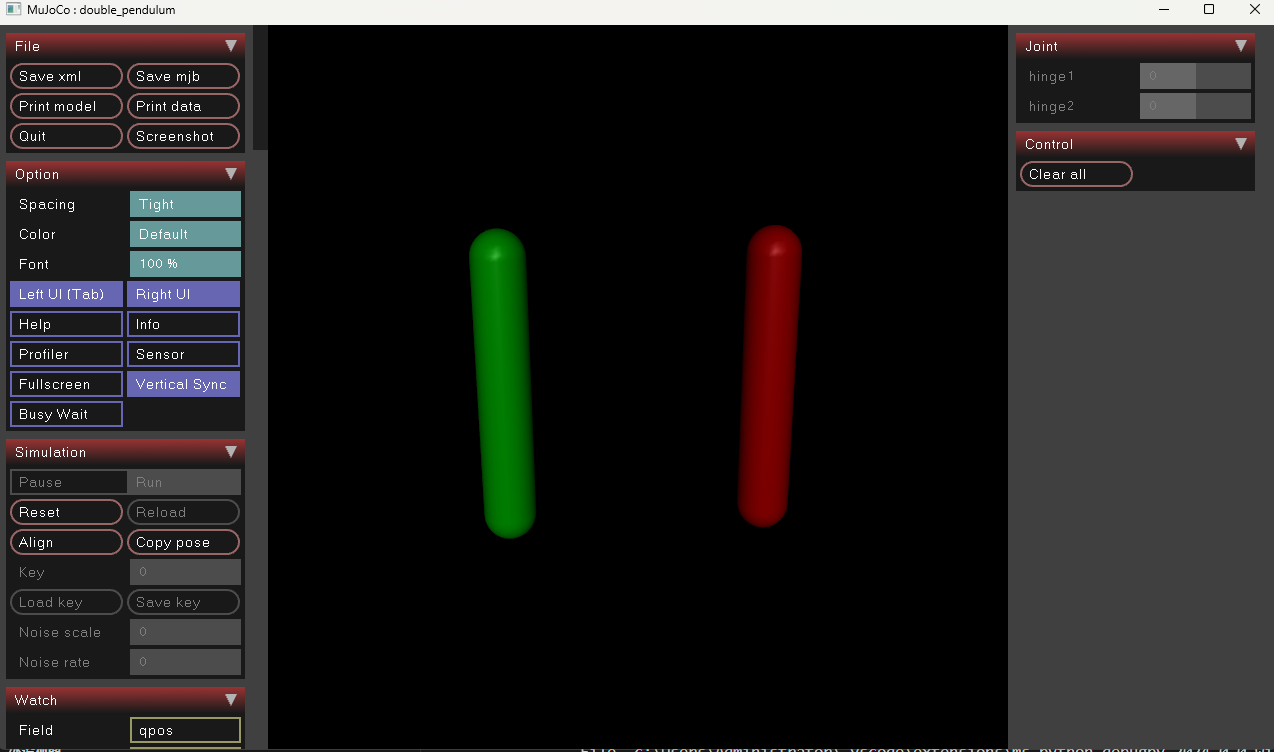
以下是一个简单的Mujoco仿真示例,展示如何创建一个简单的双关节机器人模型并进行仿真。
- 模型定义(XML文件) :
<mujoco model="double_pendulum"><compiler angle="degree"/><option integrator="RK4" timestep="0.002"/><worldbody><body name="link1" pos="0 0 0"><geom type="capsule" size="0.05 0.25" rgba="1 0 0 1"/><joint name="hinge1" type="hinge" pos="0 0 0" axis="0 0 1"/><body name="link2" pos="0 0.5 0"><geom type="capsule" size="0.05 0.25" rgba="0 1 0 1"/><joint name="hinge2" type="hinge" pos="0 0 0" axis="0 0 1"/></body></body></worldbody>
</mujoco>
- 仿真代码(Python) :
import mujoco
import mujoco.viewermodel = mujoco.MjModel.from_xml_path("double_pendulum.xml")
data = mujoco.MjData(model)with mujoco.viewer.launch_passive(model, data) as viewer:while viewer.is_running():mujoco.mj_step(model, data)viewer.sync()
在这个示例中,我们定义了一个双关节机器人模型,包含两个关节和两个连杆。通过Mujoco的Python接口,我们加载模型并启动仿真,实时显示机器人的运动过程。
Mujoco仿真是一种强大的工具,能够为机器人、运动学和人工智能等领域提供高效的仿真支持。通过合理利用其功能和优势,可以有效地提高研究和开发的效率和质量。