2024年SEVC SCI2区,一致性虚拟领航者跟踪群集算法GDRRT*-PSO+多无人机路径规划,深度解析+性能实测
目录
- 1.摘要
- 2.算法背景
- 3.GDRRT*-PSO与虚拟领航者跟踪算法
- 4.结果展示
- 5.参考文献
- 6.算法辅导·应用定制·读者交流
1.摘要
随着无人机技术的快速发展及其卓越的运动和机动性能,无人机在社会和军事等诸多领域得到了广泛应用。多无人机协同作业,能够显著提升任务执行的效率和速度,因此成为当前研究的热点。无人机已在娱乐、交通、物流、社会治理以及军事侦察、跟踪和打击等多个场景中发挥着重要作用,推动了群体智能系统的研究进步。本文提出了一种创新无人机群体拓扑结构,将一致性虚拟领航者跟踪群集算法(CBVLTSA)与基于目标距离快速扩展随机树-粒子群优化算法(GDRRT*-PSO)相结合,实现了高效的队形控制与路径规划。GDRRT*-PSO在大范围环境下具备高效的路径搜索和快速收敛能力,并通过粒子群优化进一步缩短路径长度。CBVLTSA则通过势函数推拉机制,协调群体成员之间的协作与避障,同时保持队形和安全飞行。
2.算法背景
GDRRT*和GDRRT*-PSO路径规划算法
GDRRT* 是在传统RRT算法基础上发展而来,专为无人机三维环境设计。相较于RRT* ,它不仅具备更快的目标收敛速度和更低的计算成本,还有效克服了环境规模扩大时路径规划效率下降的问题。GDRRT* 通过引入受控的采样机制,减少了随机性,使得采样点能够更有针对性地朝目标区域分布,从而提升了路径规划的效率和稳定性。随机样本分配:
xrand=(xcurrent−d2)+rand(0,1)×((xcurrent+d2)−(xcurrent−d2))x_{rand}=\mathrm{~}\left(x_{current}-\frac{d}{2}\right)+rand(0,1)\times\mathrm{~}\left(\left(x_{current}+\frac{d}{2}\right)-\left(x_{current}-\frac{d}{2}\right)\right) xrand= (xcurrent−2d)+rand(0,1)× ((xcurrent+2d)−(xcurrent−2d))
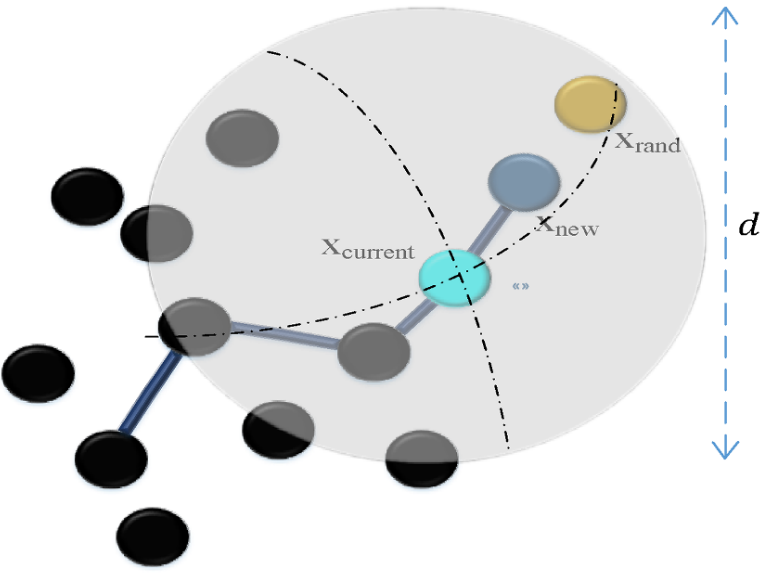
GDRRT* 在采样时会将新节点限制在以当前节点为中心、半径为d/2的空间范围内,而不是在整个空间内随机采样。这种约束让每次采样都更加接近目标,提高了算法的收敛速度。
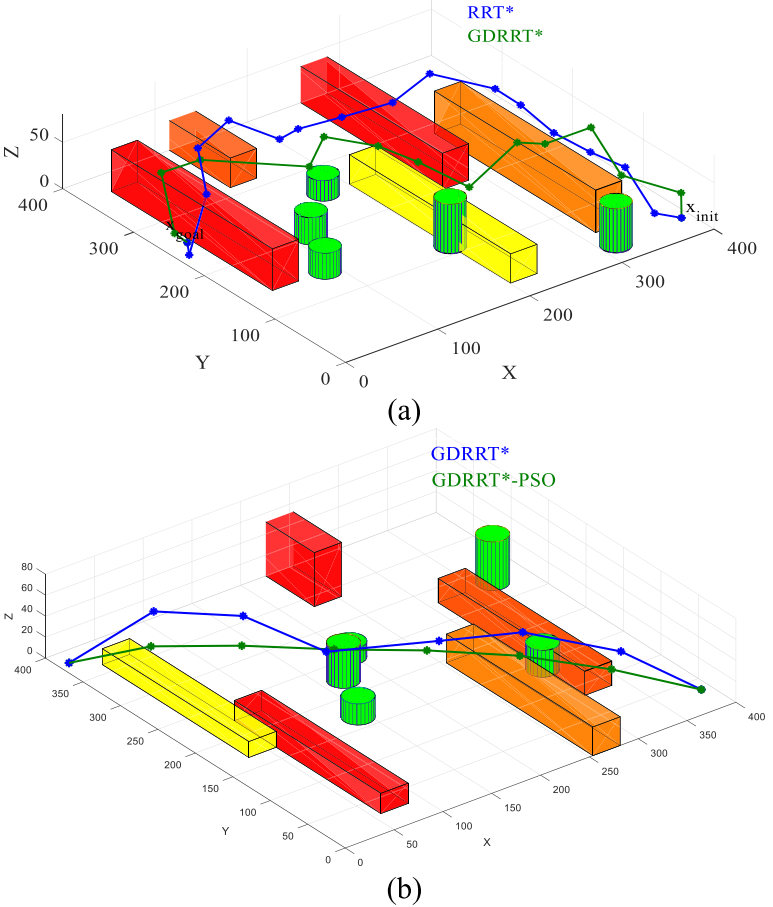
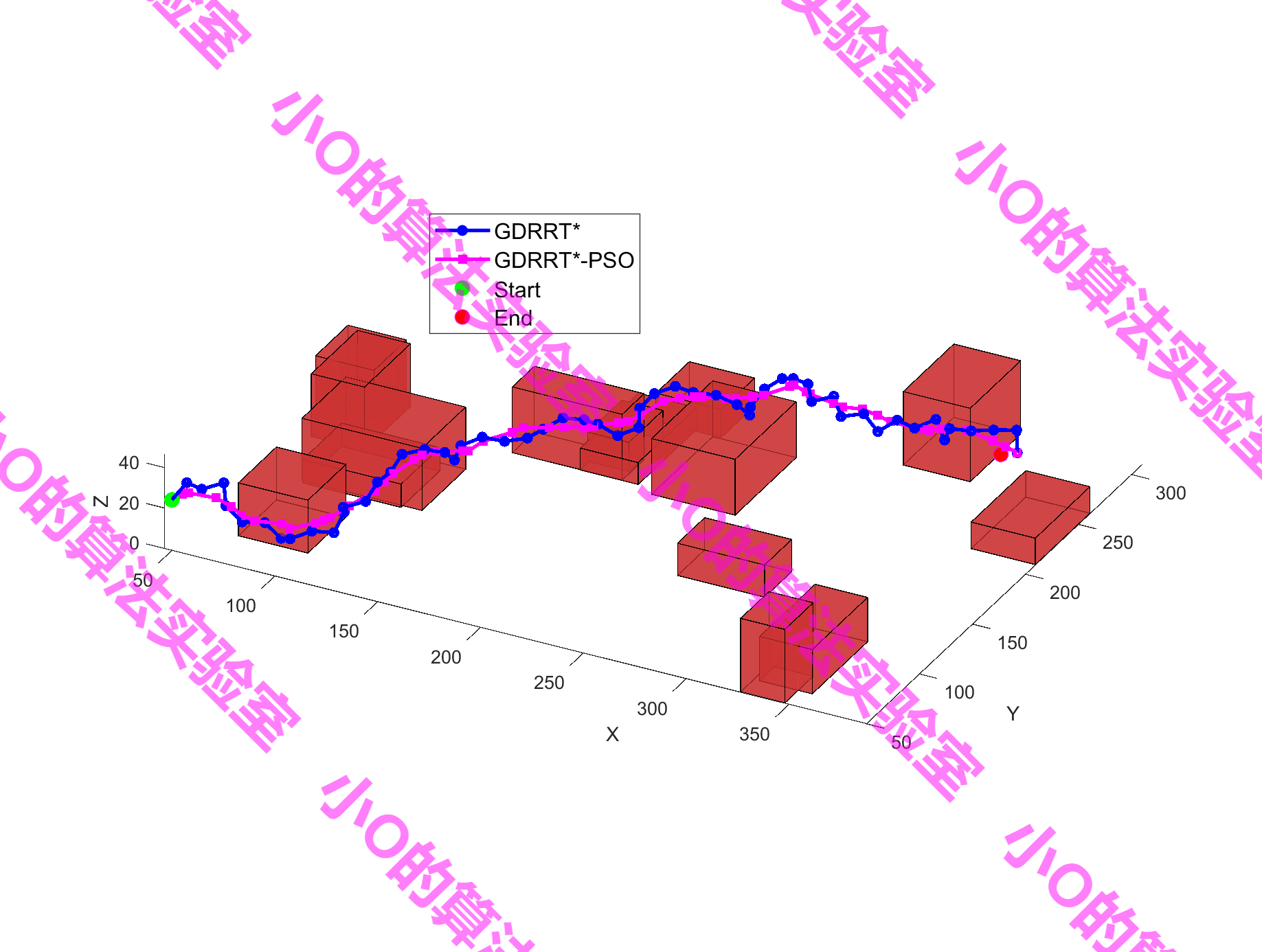
在路径长度优化方面,结合PSO算法(GDRRT*-PSO)能够进一步缩短GDRRT* 规划路径。多次实验表明,GDRRT* -PSO在路径长度和规划时间上都优于单独的GDRRT* 和RRT算法。在不同三维环境下,GDRRT*-PSO不仅大幅减少了规划时间,也有效缩短了最终路径。
离散时间一致性算法
基于一致性群体算法是一种根据协作群体成员之间的邻域关系来实现信息流动的算法。当第iii个群体成员向其邻居jjj有信息流动(dij>0d_{ij} > 0dij>0)时,协作数据流的更新:
Ci(t+1)=∑j∈NidijCi(t)C_i(t+1)=\sum_{j\in N_i}d_{ij}C_i(t) Ci(t+1)=j∈Ni∑dijCi(t)
相反,如果dij=0d_{ij} = 0dij=0,则认为两者之间没有信息传递。
当将邻居关系转化为矩阵形式后,群体成员之间的信息交互可以通过一个行随机矩阵DDD来描述。每一时刻,各成员根据自身和邻居状态的加权平均来更新自己的信息。只要邻接关系形成的网络结构满足一定条件,矩阵
DDD会有一个特征值为1,其余特征值都在单位圆内。所有成员的状态最终都会收敛到一个共同值,这个值是初始状态的加权平均。
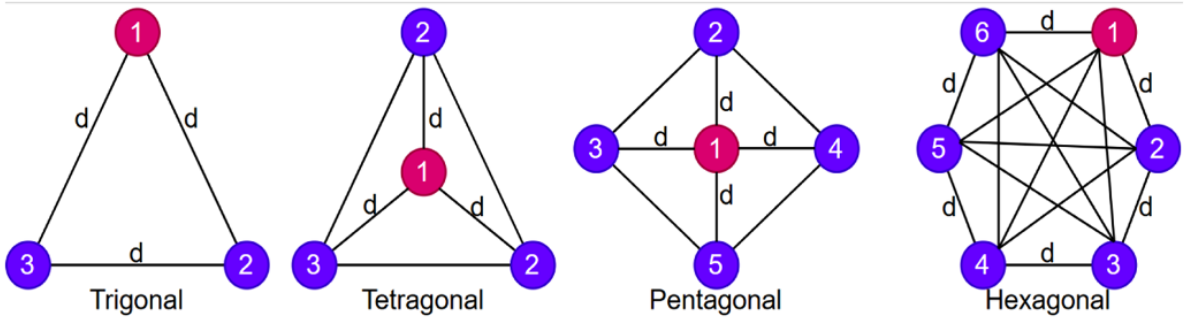
一致性虚拟领航者跟踪群体拓扑结构
在UAV建模中,基本物理动力学可以根据位置、速度或加速度来定义。本研究采用离散时间单积分器动力学模型:
xi(t+1)=xi(t)+ui(t),iϵNx_i(t+1)=x_i(t)+u_i(t),i\epsilon N xi(t+1)=xi(t)+ui(t),iϵN
其中,xi(t)x_i(t)xi(t)表示第iii架无人机在三维空间中的瞬时位置,控制输入ui(t)u_i(t)ui(t)决定了其下一时刻的位置xi(t+1)x_i(t+1)xi(t+1) 。无人机集群的规模用NNN表示,NNN是包含所有群体成员的集合,每个成员都有一个半径为εr\varepsilon_rεr的球形传感器感知范围。
在基于一致性群体拓扑结构中,成员之间的全局通信及每个成员对数据流的贡献带来了显著优势,该拓扑采用分布式有向图(Distributed Directed Graph, DDG)来描述,其中每个成员可以实时共享位置信息。
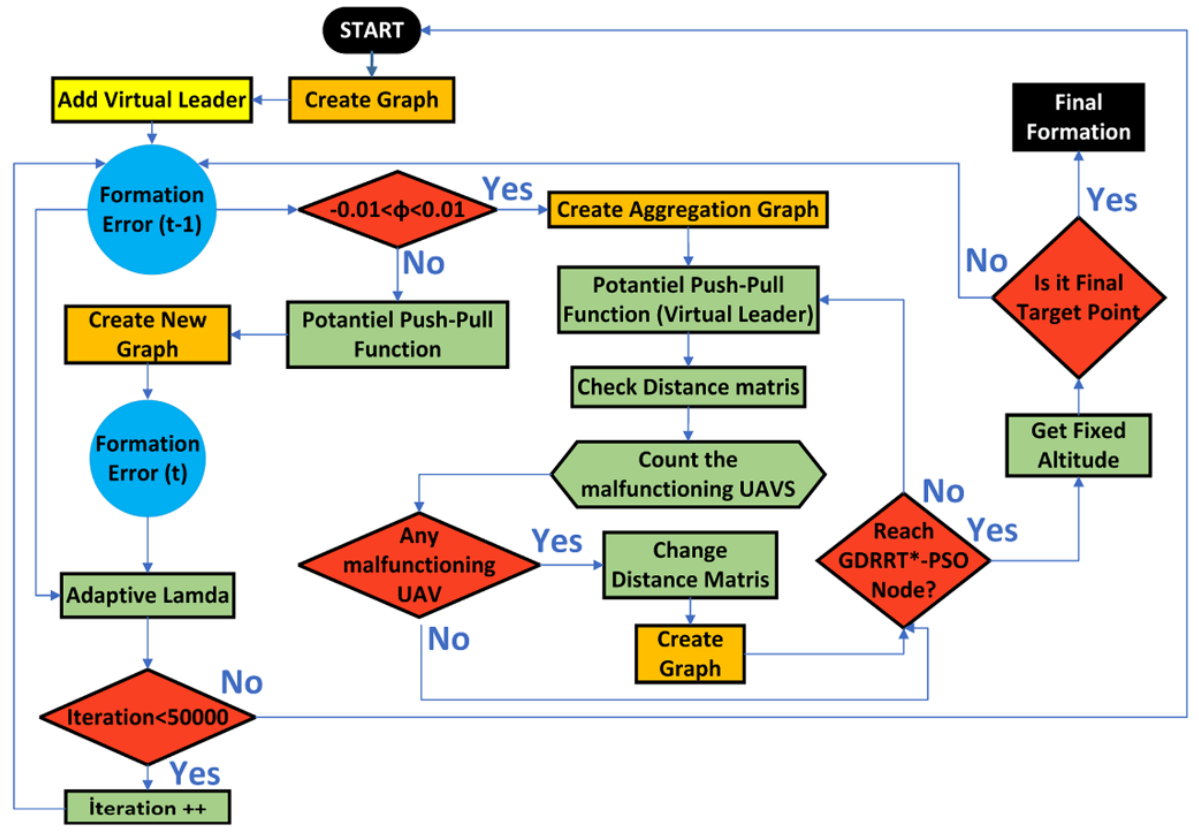
3.GDRRT*-PSO与虚拟领航者跟踪算法
真实领航者跟踪适合小范围应用,但在大范围环境下容易导致系统失稳。因此,本文将虚拟领航者一致性算法与GDRRT*-PSO路径规划融合,实现了队形稳定与高效路径规划的统一,该混合算法能动态调整队形和通信结构,提高了无人机群的鲁棒性与任务效率。
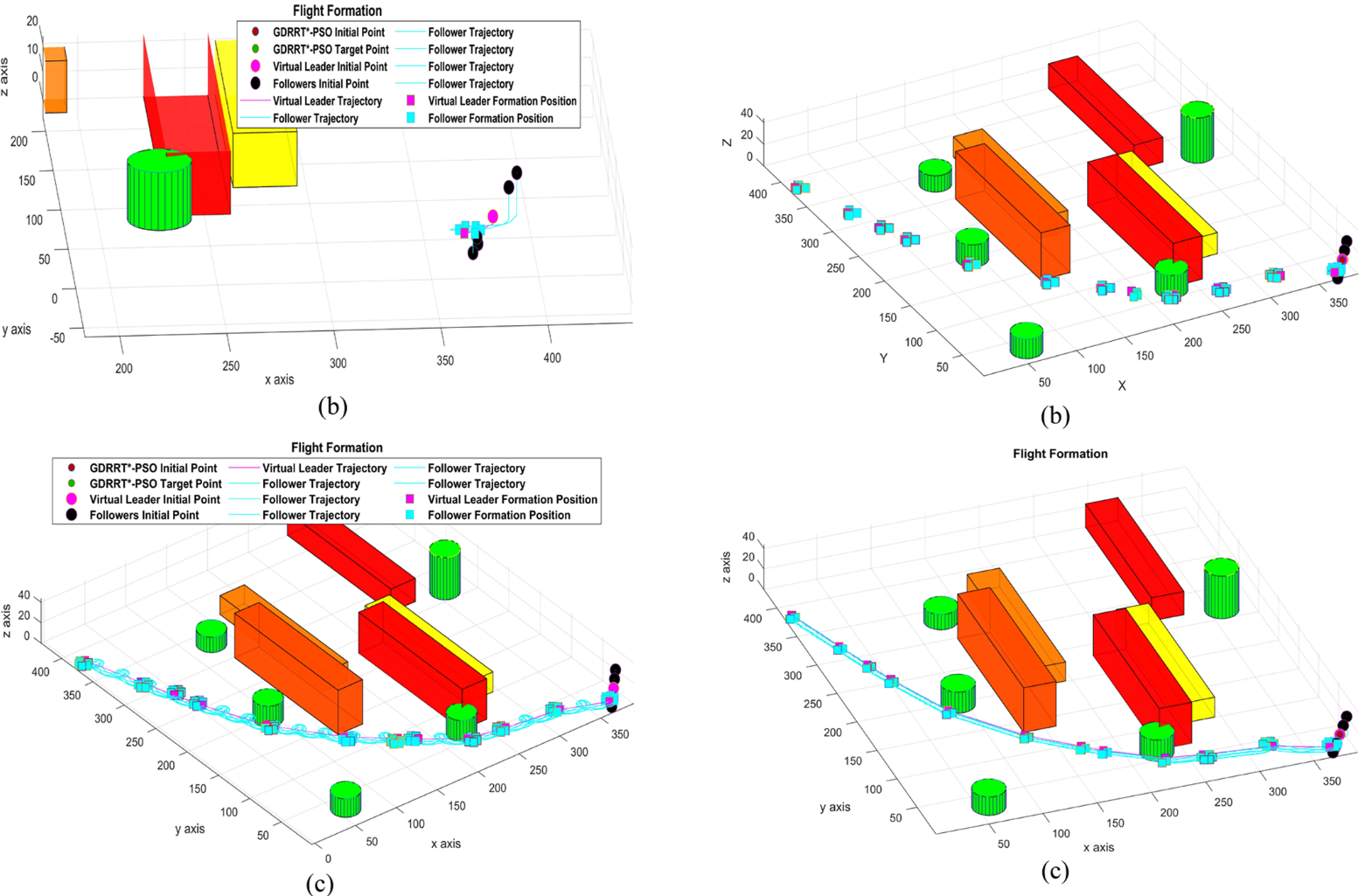
4.结果展示
5.参考文献
[1] Yildiz B, Aslan M F, Durdu A, et al. Consensus-based virtual leader tracking swarm algorithm with GDRRT*-PSO for path-planning of multiple-UAVs[J]. Swarm and Evolutionary Computation, 2024, 88: 101612.