3D 工业相机解析:轴向、平面、重复、线性精度到底哪个更重要?
在 3D 工业相机选型时,“精度” 往往是用户最先关注的指标,但面对参数表上的 “轴向精度 ”“平面精度”“重复精度”“线性精度”,很多工程师都会陷入困惑:这些参数到底代表什么?为什么同一台设备会有多个精度数值?在实际检测中,哪个参数才是决定成败的关键?
一、四个精度参数的本质区别
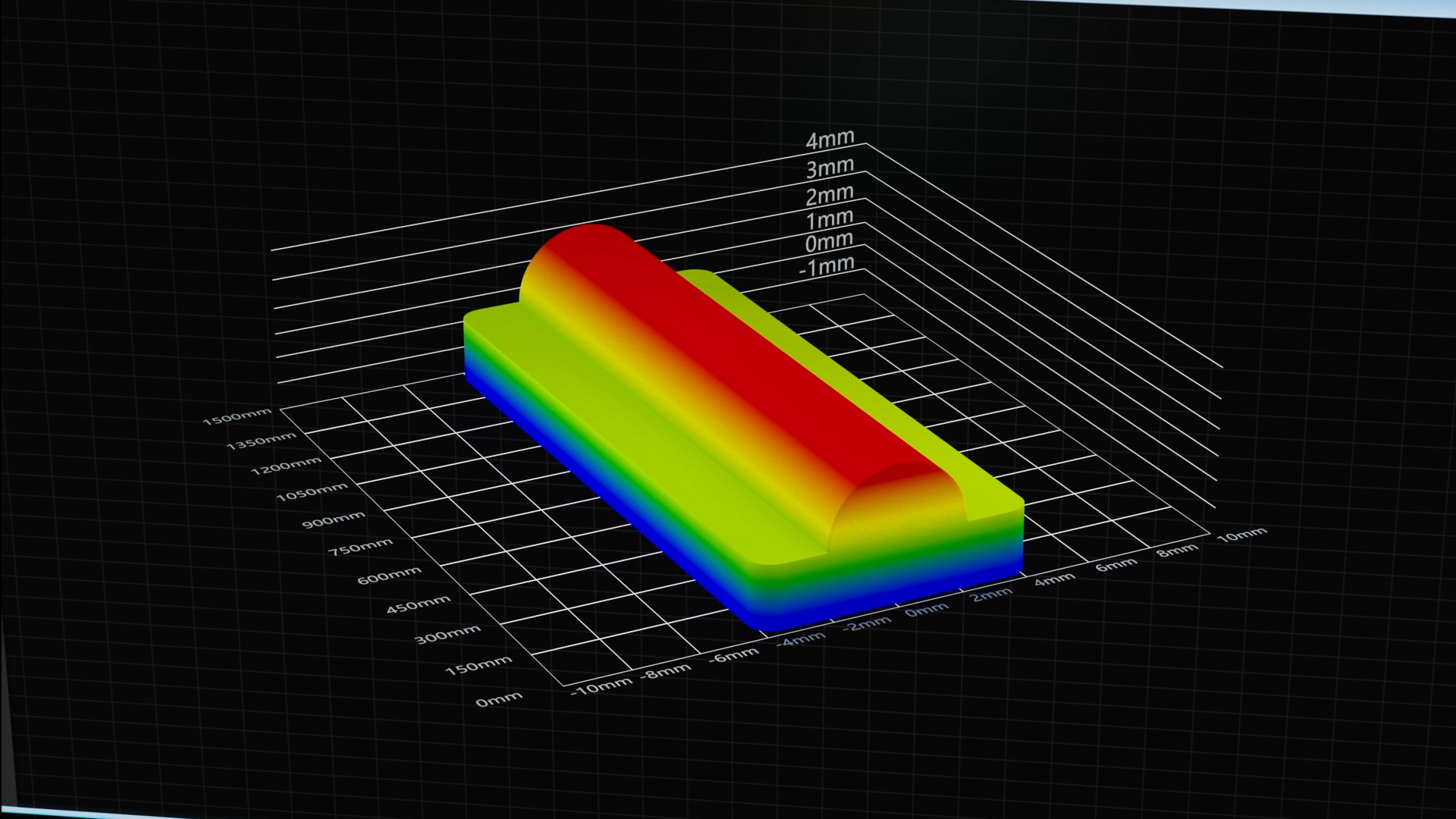
1. 轴向精度(Z 轴精度):三维检测的 “身高尺”
轴向精度指的是 3D 相机在垂直于扫描平面方向(即 Z 轴)的测量精度,主要用于判断物体的高度、厚度、台阶差等立体特征。比如检测手机中框的曲面弧度、轴承滚道的深度、电池极片的凸起高度,这些场景的核心指标就是轴向精度。
以光子精密 GL-8000 系列为例,其轴向精度可达0.0023mm,意味着在测量 1mm 高的台阶时,最大误差不会超过0.0023mm。这一参数直接决定了设备能否捕捉到微米级的立体缺陷 。
2. 平面精度(X/Y 轴精度):二维尺寸的 “卡尺”
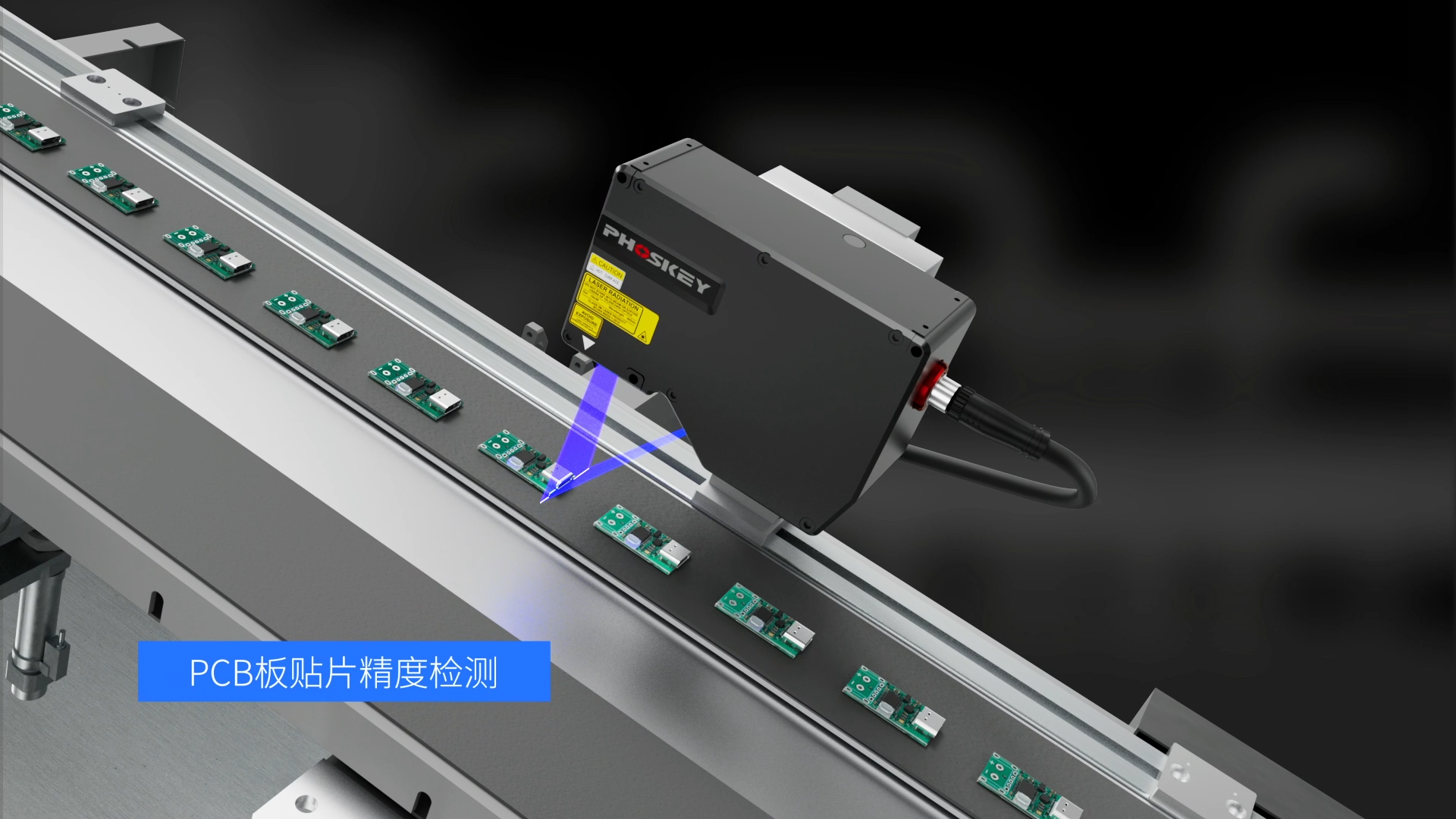
平面精度描述的是在扫描平面内(X 轴和 Y 轴)的测量精度,主要用于检测长度、宽度、间距等平面尺寸。例如判断 PCB 板上两个焊点的间距、瓶盖的直径是否达标,这些场景更依赖平面精度。
3. 重复精度:检测稳定性的 “试金石”
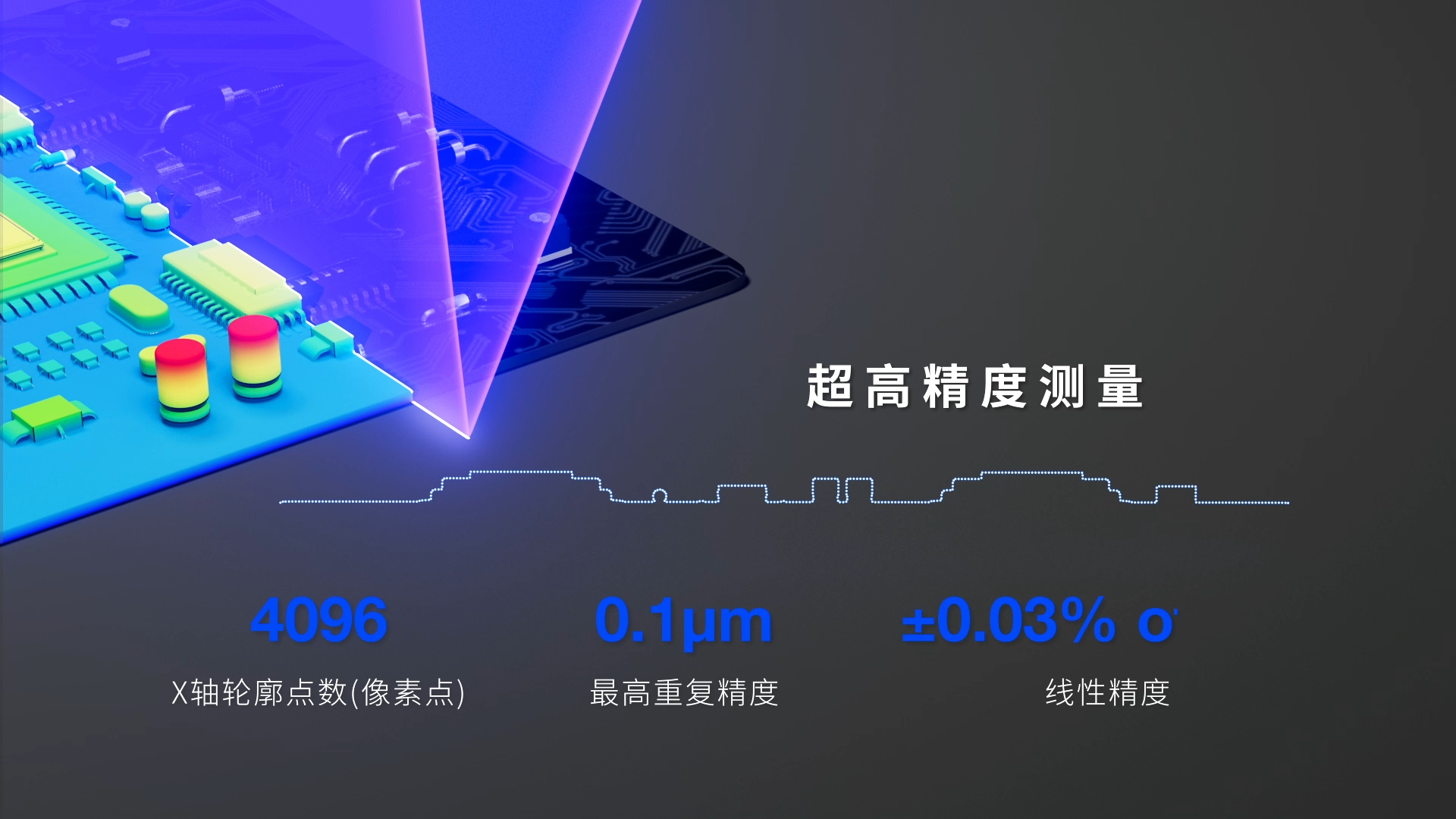
重复精度指的是对同一位置、同一特征进行多次测量时,结果的一致性偏差。比如光子精密 GL-80203D线激光轮廓测量仪,重复精度为0.3μm,意味着其连续 10 次测量同一个轴承的厚度, 10 次结果的最大波动范围不超过 0.0003mm。
这一参数直接反映设备的 “可靠性”。如使用重复精度差的3D工业相机检测精密工件时,会导致大量误判 —— 前一次检测为合格的产品,下一次可能被判定为不合格。
4. 线性精度:大尺寸测量的 “防偏指南”
线性精度描述的是在全测量量程内,设备测量值随实际尺寸线性变化的一致性偏差,通常以 “每米误差” 标注(如 ±0.05mm/m)。它关注的是 “误差是否均匀分布”,比如测量 1 米长的工件,线性精度 ±0.05mm/m 意味着两端最大误差差不超过 0.05mm;若测量 2 米长工件,总误差应≤±0.1mm。
二、不同场景下的精度优先级
1. 精密三维检测:轴向精度>重复精度>平面精度
在检测曲面、立体轮廓、高度差等场景(如发动机缸体的气道深度、手机中框的曲面弧度),轴向精度是核心指标。以新能源电池极片检测为例,极片边缘的微凸起(高度 0.05mm)可能导致短路,此时必须保证轴向精度≤±0.01mm 才能有效识别。
2. 平面尺寸测量:平面精度 + 重复精度并重
对于 PCB 板打孔位置、连接器针脚间距等二维尺寸检测,平面精度直接决定测量准确性,但重复精度同样关键。这类场景建议选择平面精度与重复精度都高的3D工业相机,光子精密GL-8000 系列3D工业相机在平面精度上可达 2-3μm,重复精度达0.3微米,完全满足多数电子元件的二维检测需求。
3. 批量生产检测:重复精度是 “底线”
在汽车零部件、消费电子等批量生产场景中,即使轴向和平面精度达标,重复精度不足也会导致产线混乱,导致不合格产品流出,增加不良品回收返工的流程。因此在大批量检测场景中,此时重复精度的优先级最高 ,可有效控制产品合格率。
4. 大尺寸工件检测:线性精度>平面精度>轴向精度
对于汽车车身、风电叶片、飞机机翼等的大尺寸工件,线性精度是决定性指标。某高铁车架厂检测 2.5 米长的横梁时,3D工业相机平面精度虽达 ±0.05mm,但线性精度仅 ±0.1mm/m,导致两端孔位间距误差达 0.25mm,远超 ±0.15mm 的装配要求。
轴向、平面、重复、线性精度并非对立关系,而是从不同维度描述设备性能。选型时的核心原则是:让参数与实际检测需求的 “公差带” 精准匹配 —— 这才是避免 “精度过剩” 或 “精度不足” 的关键。