[蓝牙通信] 临界区管理 | volatile | 同步(互斥锁与信号量) | handle
第三章:临界区管理
在前一章《时间抽象》中,我们掌握了NimBLE如何实现跨FreeRTOS时钟频率的通用时间管理。
现在需要解决多任务系统的核心挑战——如何防止多个程序段并发访问导致数据损坏。
临界区的重要性
设想两位工程师(任务A和任务B)需要修改共享白板上的数值:
- 任务A逻辑:读取当前值,加5后回写
- 任务B逻辑:读取当前值,减3后回写
当初始值为10时,若并发操作可能产生如下时序:
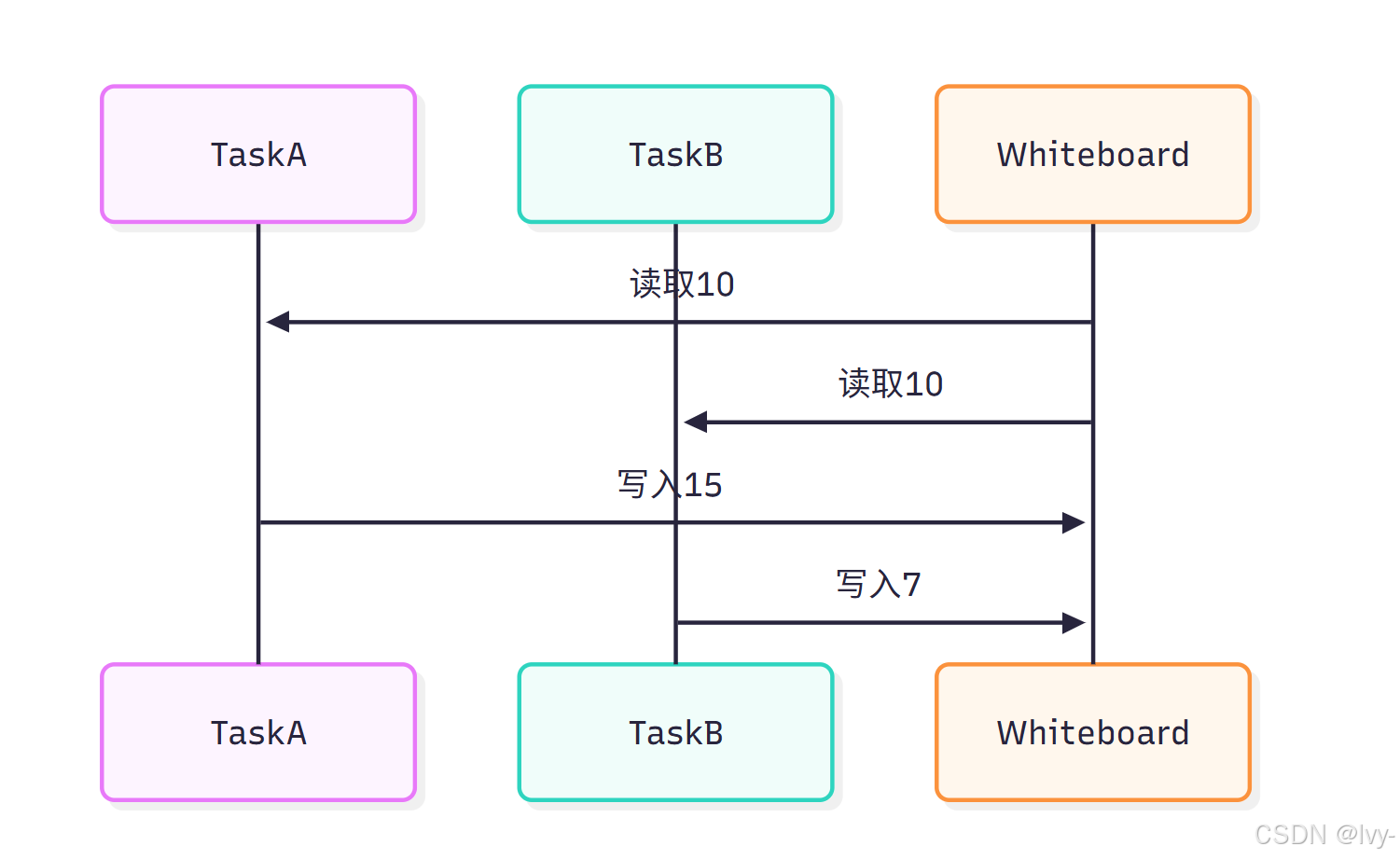
最终结果错误显示为7而非理论值12,这就是**竞态条件**的典型案例。
临界区的核心价值:建立原子操作保护域,确保共享资源(如白板数值)在操作期间免受中断服务程序(ISR)或其他任务干扰。
临界区运作原理
临界区如同在敏感操作时设置"请勿打扰"标识,通过禁用中断实现独占访问:
#include "nimble/nimble_npl_os.h"volatile int 共享计数器 = 0;void 安全递增操作()
{uint32_t 临界上下文 = ble_npl_hw_enter_critical(); // 进入临界区共享计数器++; // 原子操作保证ble_npl_hw_exit_critical(临界上下文); // 退出临界区
}
技术要点:
ble_npl_hw_enter_critical()触发中断禁用- 操作期间系统暂不响应外部事件
ble_npl_hw_exit_critical()恢复中断使能
⭕volatile
volatile关键字用于标记变量,表示该变量的值可能被未知因素(如多线程、硬件中断)随时修改,强制程序每次访问时直接从内存读取最新值,避免编译器优化导致的数据不一致问题。
主要特点
- 禁止编译器优化(如缓存到寄存器)
- 保证变量的可见性(多线程场景下其他线程能立即看到修改)
- 不保证原子性(复合操作仍需同步机制)
典型场景:多线程共享标志位、硬件寄存器映射。
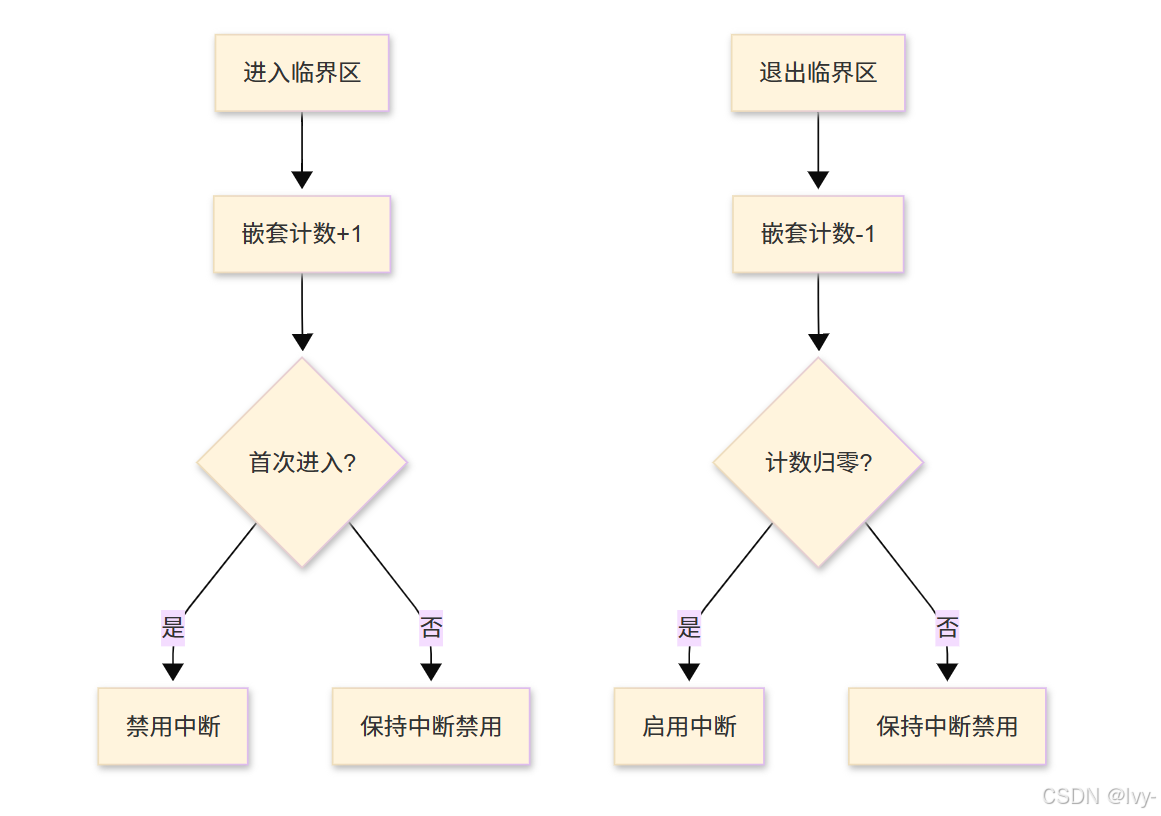
嵌套临界区管理
系统通过s_critical_nesting计数器实现多层级保护:
该机制保障了复杂函数调用链中的资源安全,例如:
void 多层保护操作()
{uint32_t ctx1 = ble_npl_hw_enter_critical(); // 嵌套层1// 操作1子层保护函数(); // 操作2ble_npl_hw_exit_critical(ctx1);
}void 子层保护函数()
{uint32_t ctx2 = ble_npl_hw_enter_critical(); // 嵌套层2// 子操作ble_npl_hw_exit_critical(ctx2);
}
每次操作前:ble_npl_hw_enter_critical()
操作后 ble_npl_hw_exit_critical
实现解析
关键代码位于nimble_npl_os.h:
volatile uint32_t s_critical_nesting; // 嵌套计数器static inline uint32_t ble_npl_hw_enter_critical(void)
{vPortEnterCritical(); // FreeRTOS原生临界区入口s_critical_nesting++; // 层级递增return 0;
}static inline void ble_npl_hw_exit_critical(uint32_t ctx)
{if (s_critical_nesting > 0) s_critical_nesting--;vPortExitCritical(); // 根据层级恢复中断
}
设计考量:
volatile修饰符确保计数器可见性- 与FreeRTOS原生接口
vPortEnter/ExitCritical深度整合- 最小化中断禁用时间(通常<20μs)
应用守则
| 场景 | 推荐方案 | 风险提示 |
|---|---|---|
| 简单变量修改 | 临界区保护 | 避免在保护区内调用阻塞函数 |
| 外设寄存器配置 | 嵌套临界区 | 注意硬件时序要求 |
| 复杂数据结构操作 | 结合信号量机制 | 防止死锁 |
| ISR与任务共享资源 | 任务侧使用临界区 | ISR中禁用临界区 |
演进方向
虽然临界区是基础保护机制,但其全局中断禁用的特性可能影响系统实时性。
后续章节将探讨更细粒度的同步:
- 互斥锁:针对
特定资源的访问控制 - 信号量:任务间协同的
计数机制 - 事件组:多条件触发的高效通知方式
⭕互斥锁的两种同步
互斥锁用于保证同一时间只有一个线程访问共享资源,避免数据竞争。
其同步方式可分为以下两类:
全局变量方式
通过一个全局标志变量(如bool lock)实现:
- 线程访问资源前检查该变量,若未被占用(
lock == false),则置为true并执行操作; - 若已被占用(
lock == true),则等待或返回。
信号量方式
使用系统提供的信号量机制(如semaphore):
- 信号量初始值为1,线程通过
wait()(P操作)尝试获取锁,成功时信号量减为0; - 其他线程调用
wait()时会阻塞,直到锁持有者调用signal()(V操作)释放资源。
关键区别
- 全局变量需手动实现忙等待或调度,可能浪费CPU;
- 信号量由操作系统管理,阻塞时释放CPU,效率更高。
代码:
全局变量方式
bool lock = false;
while (lock); // 忙等待
lock = true;
// 临界区代码
lock = false;
信号量方式
sem_t mutex;
sem_init(&mutex, 0, 1);
sem_wait(&mutex); // 阻塞等待
// 临界区代码
sem_post(&mutex);
下一章我们选取的是原生信号量的方式
第四章:同步(互斥锁与信号量)
在前章《临界区管理》中,我们掌握了通过全局中断禁用实现共享数据保护的强力但受限方案。虽然临界区非常适合极短时敏操作(如与中断服务程序(ISR)交互),但其"冻结世界"的特性会导致系统在临界区持续期间失去响应性。
当需要长时间保护共享资源或协调任务而不阻塞整个系统时,同步如互斥锁和信号量将成为更灵活高效的解决方案。
它们为多任务环境下的资源共享与任务协调提供了精细化管理手段。
同步的必要性
设想一个只有单台咖啡机的繁忙咖啡厅。若所有人同时争抢使用,必然导致混乱!任何时刻应仅限一人使用设备,这即是独占型共享资源的典型场景。
再考虑同家咖啡厅的有限座位:同一时间只能容纳固定人数的顾客,随着顾客离开座位逐步释放。这涉及资源数量管控的场景。
嵌入式系统中,任务常需:
- 保护共享数据:确保单个任务独占地修改数据(如全局计数器或蓝牙连接状态),防止数据损坏(竞态条件)
- 硬件访问控制:保障特定外设(如I2C总线、显示屏)的独占使用
- 任务协调:实现任务间的事件通知或资源就绪信号传递
虽然临界区通过禁用中断解决了"共享数据"问题,但互斥锁与信号量提供了更精细的解决方案,允许操作系统调度器持续运行。
当任务请求被占用资源时,仅需等待而其他无关任务仍可运行,从而显著提升系统响应性。
核心价值:如何在多任务环境下实现资源安全共享与任务间通信,同时保持系统全局响应性?
本章目标:理解互斥锁与信号量的核心差异,掌握通过NimBLE抽象层实现资源共享与任务协调的具体方法。
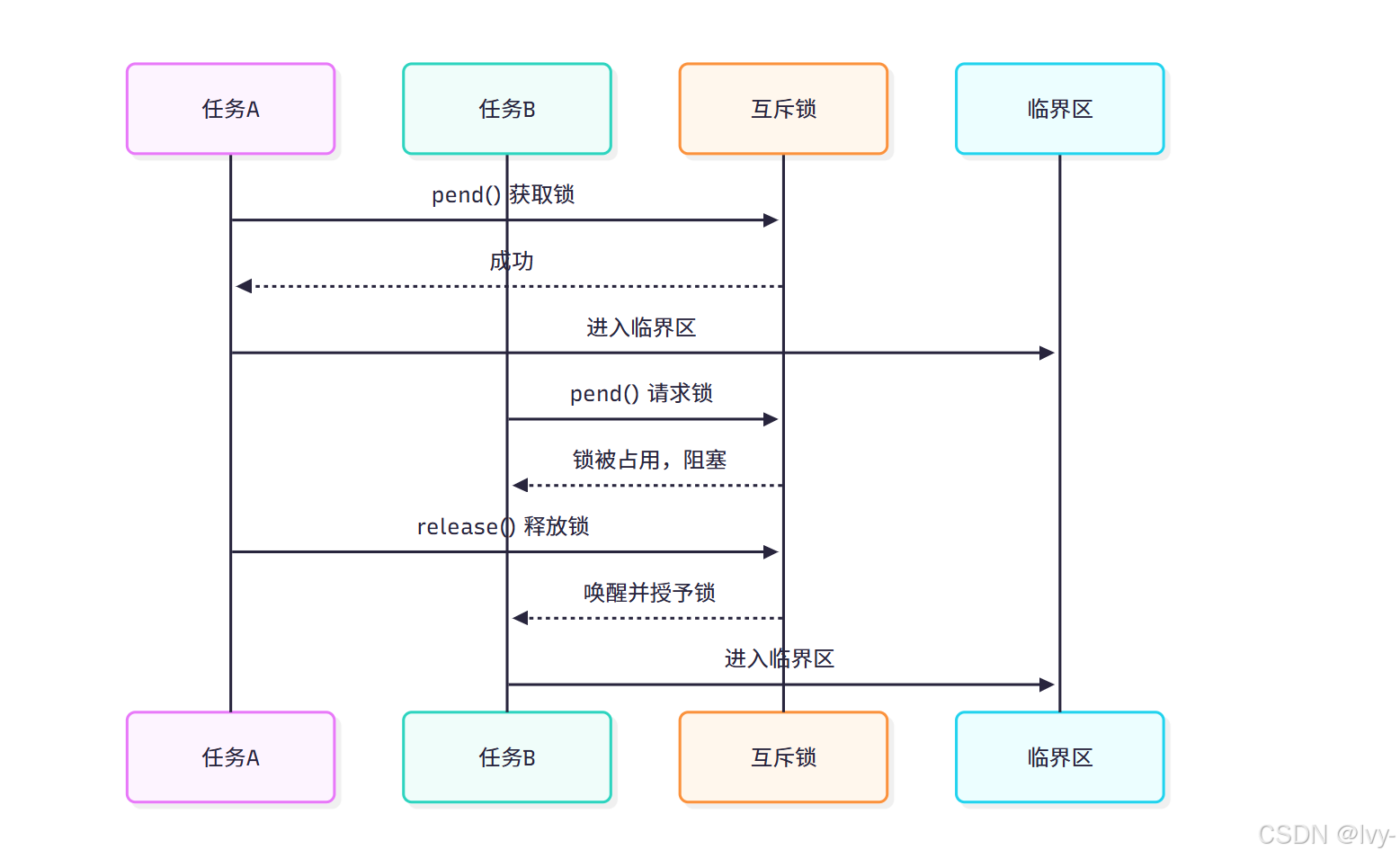
互斥锁:单人间浴室
互斥锁(Mutual Exclusion)如同单人间浴室的门锁。
仅允许一个任务"进入"(获取锁)使用资源。其他任务需等待当前任务"离开"(释放锁)才能获取访问权。
这种机制确保受保护代码段(由互斥锁守护的区域)对共享数据的操作免受并发干扰。
互斥锁使用规范
NimBLE提供的互斥锁接口:
struct ble_npl_mutex:互斥锁对象结构体,每个需保护资源对应一个实例ble_npl_mutex_init(struct ble_npl_mutex *mu):初始化互斥锁ble_npl_mutex_pend(struct ble_npl_mutex *mu, ble_npl_time_t timeout):尝试获取锁。若锁已被持有,任务将阻塞直至超时(BLE_NPL_TIME_FOREVER表示无限等待)ble_npl_mutex_release(struct ble_npl_mutex *mu):释放锁,唤醒等待任务
以下示例展示使用互斥锁保护共享计数器(改进自临界区章节案例):
#include "nimble/nimble_npl_os.h"
#include "task.h" // 1.声明互斥锁与共享数据
static struct ble_npl_mutex g_my_shared_data_mutex;
volatile int g_shared_data = 0;// 任务A:递增共享数据
void increment_task(void *pvParameters) {while (1) {// 尝试获取互斥锁(无限等待)ble_npl_mutex_pend(&g_my_shared_data_mutex, BLE_NPL_TIME_FOREVER);// 互斥锁保护区域// 任一时刻仅单任务可执行此代码g_shared_data++;// ... 其他共享数据操作 ...// 释放互斥锁ble_npl_mutex_release(&g_my_shared_data_mutex);vTaskDelay(pdMS_TO_TICKS(100)); // 模拟工作负载}
}// 任务B:读取共享数据
void read_task(void *pvParameters)
{while (1) {int current_value;ble_npl_error_t err;// 尝试获取互斥锁(50ms超时)err = ble_npl_mutex_pend(&g_my_shared_data_mutex, pdMS_TO_TICKS(50)); if (err == BLE_NPL_OK) {current_value = g_shared_data; // 安全读取ble_npl_mutex_release(&g_my_shared_data_mutex);// 实际应用中应通过日志函数输出// printf("当前共享数据: %d\n", current_value);} else if (err == BLE_NPL_TIMEOUT) {// 互斥锁占用处理// printf("读取任务:互斥锁繁忙,稍后重试\n");}vTaskDelay(pdMS_TO_TICKS(150));}
}// 系统初始化函数(main()中调度器启动前调用)
void initialize_tasks_and_mutex()
{// 2.初始化互斥锁ble_npl_mutex_init(&g_my_shared_data_mutex);// 3.创建关联任务xTaskCreate(increment_task, "递增任务",configMINIMAL_STACK_SIZE + 100, NULL, tskIDLE_PRIORITY + 1, NULL);xTaskCreate(read_task, "读取任务",configMINIMAL_STACK_SIZE + 100, NULL, tskIDLE_PRIORITY + 1, NULL);
}
(回调函数通过参数形式,实现触发调用)
关键说明:
g_my_shared_data_mutex需全局可见或任务可访问ble_npl_mutex_init()确保互斥锁就绪ble_npl_mutex_pend()实现临界区独占访问vTaskDelay等非关键操作置于锁外,维持系统响应性
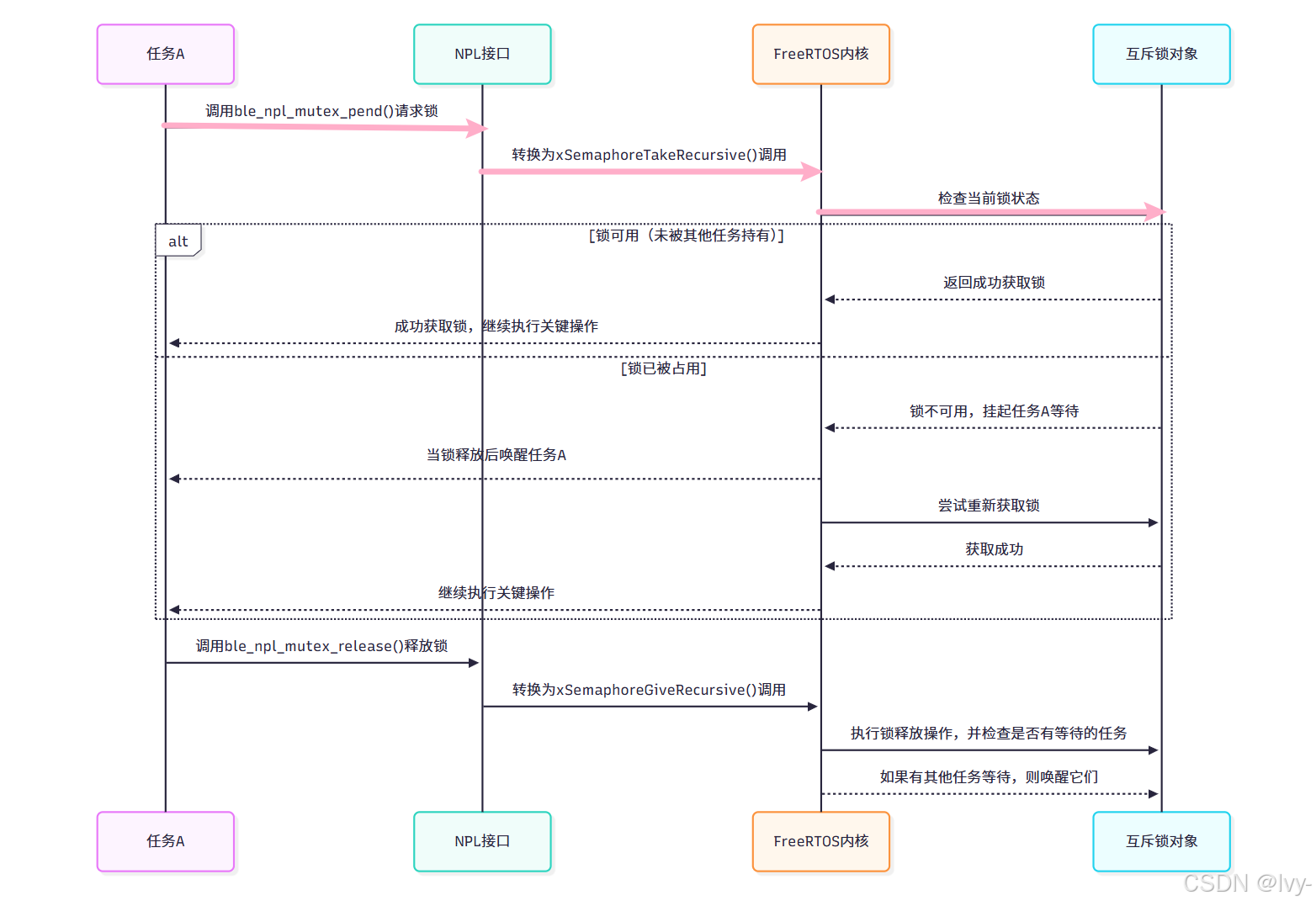
底层实现机制
互斥锁操作通过FreeRTOS原生机制实现:
代码实现在nimble_npl_os.h中:
struct ble_npl_mutex
{SemaphoreHandle_t handle; // FreeRTOS信号量句柄
};static inline ble_npl_error_t
ble_npl_mutex_pend(struct ble_npl_mutex *mu, ble_npl_time_t timeout)
{return xSemaphoreTakeRecursive(mu->handle, timeout) ? BLE_NPL_OK : BLE_NPL_TIMEOUT;
}
设计要点:
- 采用递归锁设计,允许同一任务
多次获取 - 通过信号量机制实现状态管理
- 严格的
所有权机制(仅持有者能释放锁)
🎢句柄
这个设计通过一个结构体 ble_npl_mutex 封装了 FreeRTOS 的信号量句柄 SemaphoreHandle_t,目的是在更高层的代码中抽象化底层操作系统的具体实现。
结构体成员说明:
handle成员变量存储了 FreeRTOS 提供的信号量句柄,实际使用时通过这个句柄来操作信号量。
设计用途:
这种封装方式使得代码可以在不同操作系统间移植,只需修改结构体内部的实现而不影响上层代码逻辑。
对于使用者来说,只需要操作 ble_npl_mutex 结构体而不必关心底层是 FreeRTOS 还是其他系统。
信号量:停车场与信号旗
信号量是更通用的同步原语,本质是控制资源访问的计数器,主要分为两类:
-
计数信号量(停车场模型):
模拟拥有N个车位的停车场,信号量计数表示可用车位:- 车辆(任务)进入时
pend(计数减1),无车位时等待 - 车辆离开时
release(计数加1),允许等待车辆进入 - 适用于有限资源池管理(如网络连接、缓冲池)
- 车辆(任务)进入时
-
二进制信号量(信号旗模型):
计数上限为1,常用于事件通知:- 任务A
release触发事件通知 - 任务B
pend等待事件触发 - 实现生产者-消费者模式的核心机制
- 任务A
信号量应用规范
NimBLE提供的信号量接口:
struct ble_npl_sem:信号量对象结构体ble_npl_sem_init(struct ble_npl_sem *sem, uint16_t initial_tokens):初始化信号量(指定初始计数)ble_npl_sem_pend(struct ble_npl_sem *sem, ble_npl_time_t timeout):尝试获取信号量(计数减1),计数为0时阻塞ble_npl_sem_release(struct ble_npl_sem *sem):释放信号量(计数加1),唤醒等待任务ble_npl_sem_get_count(struct ble_npl_sem *sem):获取当前计数值
示例1:计数信号量(资源池管理)
管理最多3个并发访问的硬件模块:
#include "nimble/nimble_npl_os.h"
#include "task.h"static struct ble_npl_sem g_资源池信号量;void 资源使用任务(void *pvParameters) {while (1) {ble_npl_sem_pend(&g_资源池信号量, BLE_NPL_TIME_FOREVER);// 临界区操作(最多3任务并发)vTaskDelay(pdMS_TO_TICKS(500)); // 模拟资源占用ble_npl_sem_release(&g_资源池信号量);vTaskDelay(pdMS_TO_TICKS(100));}
}void 初始化资源池() {ble_npl_sem_init(&g_资源池信号量, 3); // 3个可用资源// 创建4个任务(第4个将等待)xTaskCreate(资源使用任务, "用户1", ..., NULL, ...);xTaskCreate(资源使用任务, "用户2", ..., NULL, ...);xTaskCreate(资源使用任务, "用户3", ..., NULL, ...);xTaskCreate(资源使用任务, "用户4", ..., NULL, ...);
}
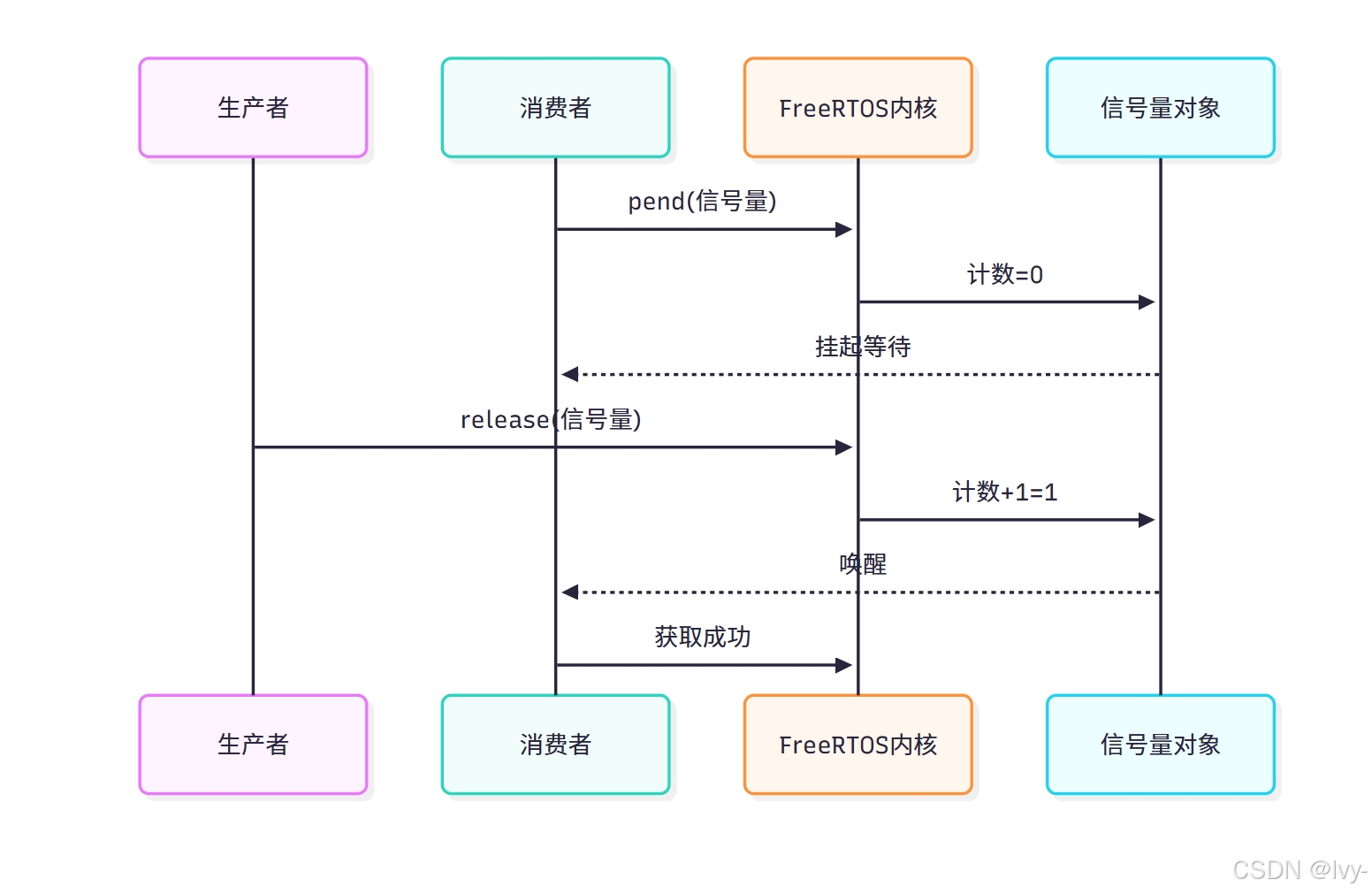
示例2:二进制信号量(事件通知)
生产者-消费者模式实现:
static struct ble_npl_sem g_数据就绪信号量;void 生产者任务(void *pvParameters)
{while (1) {vTaskDelay(pdMS_TO_TICKS(2000)); // 模拟数据生成ble_npl_sem_release(&g_数据就绪信号量); // 触发事件}
}void 消费者任务(void *pvParameters)
{while (1) {ble_npl_sem_pend(&g_数据就绪信号量, BLE_NPL_TIME_FOREVER);// 处理数据vTaskDelay(pdMS_TO_TICKS(500)); }
}void 初始化事件系统() {ble_npl_sem_init(&g_数据就绪信号量, 0); // 初始无数据xTaskCreate(生产者任务, "生产者", ..., NULL, ...);xTaskCreate(消费者任务, "消费者", ..., NULL, ...);
}
运行机制解析
底层实现代码片段:
struct ble_npl_sem
{SemaphoreHandle_t handle; // FreeRTOS信号量句柄
};ble_npl_error_t npl_freertos_sem_pend(...)
{if (中断上下文) {xSemaphoreTakeFromISR(...); // 非阻塞获取} else {xSemaphoreTake(...); // 任务级阻塞获取}
}
设计特性:
- 支持中断上下文操作(需
FromISR接口) - 计数信号量管理资源池
- 二进制信号量实现事件标志
互斥锁 vs 信号量:核心差异
尽管两者均用于同步,但设计目标不同:
| 特性 | 互斥锁 | 信号量 |
|---|---|---|
| 设计目标 | 资源独占访问(数据保护) | 事件通知/资源池管理(任务协调) |
| 所有权 | 严格归属(仅持有者可释放) | 无明确所有权(任意任务/ISR可释放) |
| 计数模式 | 二元状态(锁定/解锁),支持递归获取 | 二进制(0/1)或计数(0-N) |
| 初始状态 | 未锁定 | 可配置初始计数(如0表示事件未触发) |
| 中断使用 | 通常禁止(特定实现支持ISR版本) | 允许ISR端释放信号量 |
| 适用场景 | 数据结构保护、硬件外设独占 | 任务间通信、连接池管理、事件广播 |
设计准则
- 锁粒度控制:保持临界区代码最小化
- 死锁预防:采用
固定顺序获取多个锁 - 优先级继承:利用
FreeRTOS优先级继承协议 - 性能监控:通过uxSemaphoreGetCount()
诊断资源争用
演进方向
同步为构建复杂同步机制奠定基础,后续可扩展:
- 条件变量:实现更精细的等待/通知机制
- 读写锁:优化读多写少场景性能
- 屏障同步:协调多阶段并行任务
下一章我们继续探索《事件管理》章节,了解NimBLE蓝牙协议栈的事件驱动架构。