读心与芯:我们与机器人的无限未来05未来之路
1. 概念
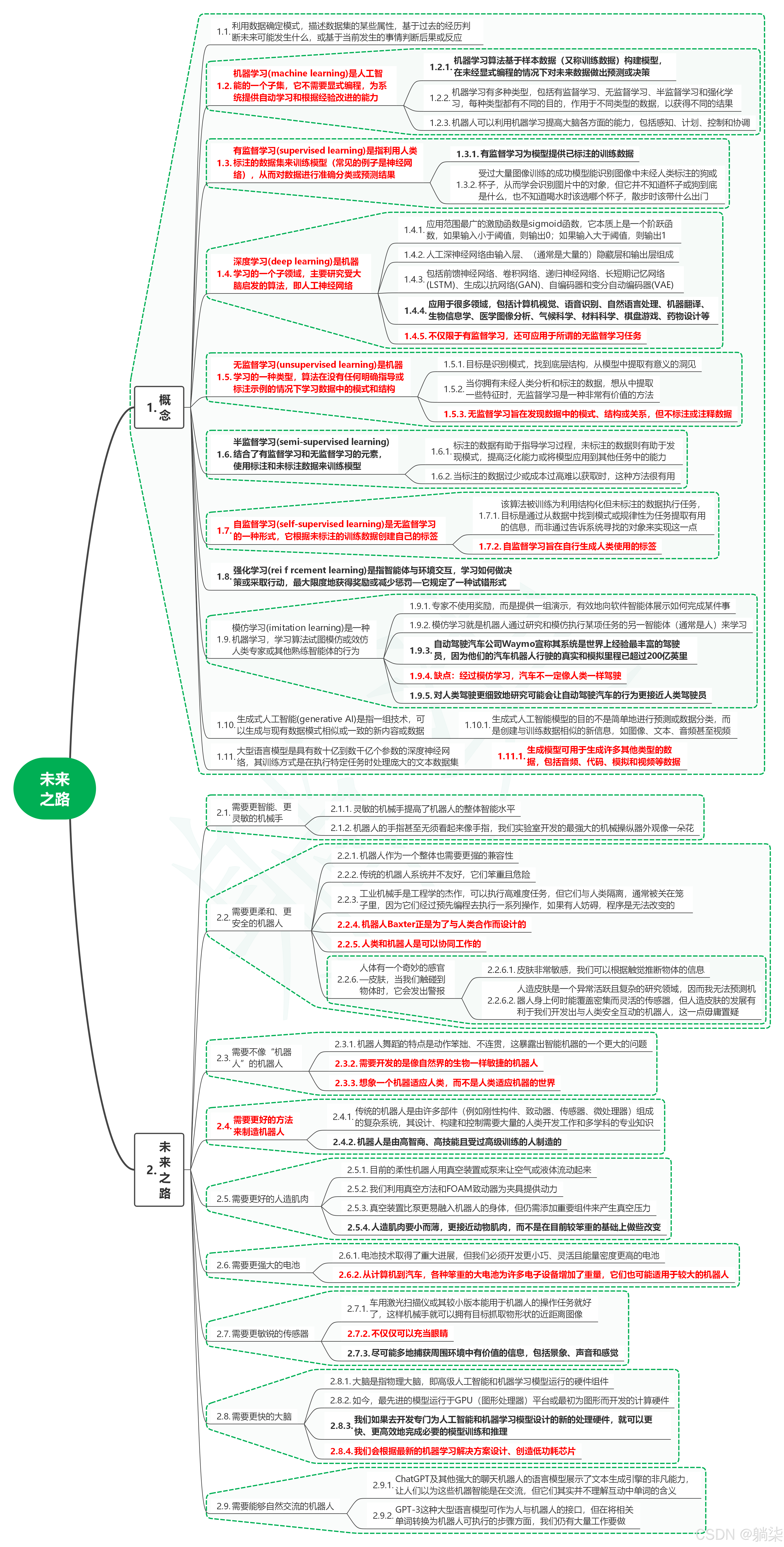
1.1. 利用数据确定模式,描述数据集的某些属性,基于过去的经历判断未来可能发生什么,或基于当前发生的事情判断后果或反应
1.2. 机器学习(machine learning)是人工智能的一个子集,它不需要显式编程,为系统提供自动学习和根据经验改进的能力
1.2.1. 机器学习算法基于样本数据(又称训练数据)构建模型,在未经显式编程的情况下对未来数据做出预测或决策
1.2.2. 机器学习有多种类型,包括有监督学习、无监督学习、半监督学习和强化学习,每种类型都有不同的目的,作用于不同类型的数据,以获得不同的结果
1.2.3. 机器人可以利用机器学习提高大脑各方面的能力,包括感知、计划、控制和协调
1.3. 有监督学习(supervised learning)是指利用人类标注的数据集来训练模型(常见的例子是神经网络),从而对数据进行准确分类或预测结果
1.3.1. 有监督学习为模型提供已标注的训练数据
1.3.2. 受过大量图像训练的成功模型能识别图像中未经人类标注的狗或杯子,从而学会识别图片中的对象,但它并不知道杯子或狗到底是什么,也不知道喝水时该选哪个杯子,散步时该带什么出门
1.4. 深度学习(deep learning)是机器学习的一个子领域,主要研究受大脑启发的算法,即人工神经网络
1.4.1. 应用范围最广的激励函数是sigmoid函数,它本质上是一个阶跃函数,如果输入小于阈值,则输出0;如果输入大于阈值,则输出1
1.4.2. 人工深神经网络由输入层、(通常是大量的)隐藏层和输出层组成
1.4.3. 包括前馈神经网络、卷积网络、递归神经网络、长短期记忆网络(LSTM)、生成以抗网络(GAN)、自编码器和变分自动编码器(VAE)
1.4.4. 应用于很多领域,包括计算机视觉、语音识别、自然语言处理、机器翻译、生物信息学、医学图像分析、气候科学、材料科学、棋盘游戏、药物设计等
1.4.5. 不仅限于有监督学习,还可应用于所谓的无监督学习任务
1.5. 无监督学习(unsupervised learning)是机器学习的一种类型,算法在没有任何明确指导或标注示例的情况下学习数据中的模式和结构
1.5.1. 目标是识别模式,找到底层结构,从模型中提取有意义的洞见
1.5.2. 当你拥有未经人类分析和标注的数据,想从中提取一些特征时,无监督学习是一种非常有价值的方法
1.5.3. 无监督学习旨在发现数据中的模式、结构或关系,但不标注或注释数据
1.6. 半监督学习(semi-supervised learning)结合了有监督学习和无监督学习的元素,使用标注和未标注数据来训练模型
1.6.1. 标注的数据有助于指导学习过程,未标注的数据则有助于发现模式,提高泛化能力或将模型应用到其他任务中的能力
1.6.2. 当标注的数据过少或成本过高难以获取时,这种方法很有用
1.7. 自监督学习(self-supervised learning)是无监督学习的一种形式,它根据未标注的训练数据创建自己的标签
1.7.1. 该算法被训练为利用结构化但未标注的数据执行任务,目标是通过从数据中找到模式或规律性为任务提取有用的信息,而非通过告诉系统寻找的对象来实现这一点
1.7.2. 自监督学习旨在自行生成人类使用的标签
1.8. 强化学习(rei f rcement learning)是指智能体与环境交互,学习如何做决策或采取行动,最大限度地获得奖励或减少惩罚—它规定了一种试错形式
1.9. 模仿学习(imitation learning)是一种机器学习,学习算法试图模仿或效仿人类专家或其他熟练智能体的行为
1.9.1. 专家不使用奖励,而是提供一组演示,有效地向软件智能体展示如何完成某件事
1.9.2. 模仿学习就是机器人通过研究和模仿执行某项任务的另一智能体(通常是人)来学习
1.9.3. 自动驾驶汽车公司Waymo宣称其系统是世界上经验最丰富的驾驶员,因为他们的汽车机器人行驶的真实和模拟里程已超过200亿英里
1.9.4. 缺点:经过模仿学习,汽车不一定像人类一样驾驶
1.9.5. 对人类驾驶更细致地研究可能会让自动驾驶汽车的行为更接近人类驾驶员
1.10. 生成式人工智能(generative AI)是指一组技术,可以生成与现有数据模式相似或一致的新内容或数据
- 1.10.1. 生成式人工智能模型的目的不是简单地进行预测或数据分类,而是创建与训练数据相似的新信息,如图像、文本、音频甚至视频
1.11. 大型语言模型是具有数十亿到数千亿个参数的深度神经网络,其训练方式是在执行特定任务时处理庞大的文本数据集
- 1.11.1. 生成模型可用于生成许多其他类型的数据,包括音频、代码、模拟和视频等数据
2. 未来之路
2.1. 需要更智能、更灵敏的机械手
2.1.1. 灵敏的机械手提高了机器人的整体智能水平
2.1.2. 机器人的手指甚至无须看起来像手指,我们实验室开发的最强大的机械操纵器外观像一朵花
2.2. 需要更柔和、更安全的机器人
2.2.1. 机器人作为一个整体也需要更强的兼容性
2.2.2. 传统的机器人系统并不友好,它们笨重且危险
2.2.3. 工业机械手是工程学的杰作,可以执行高难度任务,但它们与人类隔离,通常被关在笼子里,因为它们经过预先编程去执行一系列操作,如果有人妨碍,程序是无法改变的
2.2.4. 机器人Baxter正是为了与人类合作而设计的
2.2.5. 人类和机器人是可以协同工作的
2.2.6. 人体有一个奇妙的感官—皮肤,当我们触碰到物体时,它会发出警报
2.2.6.1. 皮肤非常敏感,我们可以根据触觉推断物体的信息
2.2.6.2. 人造皮肤是一个异常活跃且复杂的研究领域,因而我无法预测机器人身上何时能覆盖密集而灵活的传感器,但人造皮肤的发展有利于我们开发出与人类安全互动的机器人,这一点毋庸置疑
2.3. 需要不像“机器人”的机器人
2.3.1. 机器人舞蹈的特点是动作笨拙、不连贯,这暴露出智能机器的一个更大的问题
2.3.2. 需要开发的是像自然界的生物一样敏捷的机器人
2.3.3. 想象一个机器适应人类,而不是人类适应机器的世界
2.4. 需要更好的方法来制造机器人
2.4.1. 传统的机器人是由许多部件(例如刚性构件、致动器、传感器、微处理器)组成的复杂系统,其设计、构建和控制需要大量的人类开发工作和多学科的专业知识
2.4.2. 机器人是由高智商、高技能且受过高级训练的人制造的
2.5. 需要更好的人造肌肉
2.5.1. 目前的柔性机器人用真空装置或泵来让空气或液体流动起来
2.5.2. 我们利用真空方法和FOAM致动器为夹具提供动力
2.5.3. 真空装置比泵更易融入机器人的身体,但仍需添加重要组件来产生真空压力
2.5.4. 人造肌肉要小而薄,更接近动物肌肉,而不是在目前较笨重的基础上做些改变
2.6. 需要更强大的电池
2.6.1. 电池技术取得了重大进展,但我们必须开发更小巧、灵活且能量密度更高的电池
2.6.2. 从计算机到汽车,各种笨重的大电池为许多电子设备增加了重量,它们也可能适用于较大的机器人
2.7. 需要更敏锐的传感器
2.7.1. 车用激光扫描仪或其较小版本能用于机器人的操作任务就好了,这样机械手就可以拥有目标抓取物形状的近距离图像
2.7.2. 不仅仅可以充当眼睛
2.7.3. 尽可能多地捕获周围环境中有价值的信息,包括景象、声音和感觉
2.8. 需要更快的大脑
2.8.1. 大脑是指物理大脑,即高级人工智能和机器学习模型运行的硬件组件
2.8.2. 如今,最先进的模型运行于GPU(图形处理器)平台或最初为图形而开发的计算硬件
2.8.3. 我们如果去开发专门为人工智能和机器学习模型设计的新的处理硬件,就可以更快、更高效地完成必要的模型训练和推理
2.8.4. 我们会根据最新的机器学习解决方案设计、创造低功耗芯片
2.9. 需要能够自然交流的机器人
2.9.1. ChatGPT及其他强大的聊天机器人的语言模型展示了文本生成引擎的非凡能力,让人们以为这些机器智能是在交流,但它们其实并不理解互动中单词的含义
2.9.2. GPT-3这种大型语言模型可作为人与机器人的接口,但在将相关单词转换为机器人可执行的步骤方面,我们仍有大量工作要做