基于PLC的轨检小车控制器设计
摘要:
本文提出了轨道检测车的总体设计方案,首先设计出轨检车总体结构,轨检车主要结构有纵梁、横梁、行走机构、导向机构、支撑架、控制计算机、电机等组成。接着对电机进行选型,选择合适的步进电机及与其相匹配的驱动器来给轨检小车提供动力,然后选出合适的软件来进行对电机的控制,画出其电气原理图。其次,对轨检车的主控模块进行设计,设计和分配PLC软件的I/O接口。总体就是对运动控制作了一个选型与分析,选择步进电机作为小车的主驱动,用PLC通过控制脉冲来控制轨检小车的速度。本次的设计目标在轨检车检测设备领域,结合先进的智能技术,研制出具有自主知识产权的新型检测设备,可实现高可靠性、高精度测量、高效率、智能化。
本次设计对于促进我国铁路运输的发展,提高铁轨检测的精度,减轻铁路工人劳动强度,保障铁路运输安全有着极其重要的意义。
关键词:轨检小车 PLC 运动控制
第二章 智能轨检小车的方案设计
根据课题的要求,确定如下方案:分析研究轨检小车的行驶要求,设计出轨检小车车身基本模型,要求满足小车的行驶需求,要考虑到实际。
通过这种方案能够对轨检小车的运动方向进行控制,而且可以对小车进行灵活的和精度高的控制,这种方案是对于行进于轨道上的轨检小车来讲是相对稳定,能满足对系统的基本要求。
2.1 轨检小车车体设计
在开始设计轨检小车车体的框架的过程中,查找相关资料,再从现有的轨道检测车的车身结构来看,现有的小车结构大致可以分为两类:H型车身结构和T型车身结构。
方案1:车身结构是H型的结构的话,小车就能够对左右两条轨道的高低和轨道的方向对其进行检测,使用常用的递推法来推算测量数据。H型车身结构有几个优点:工作时方便装拆,可以不费事的重复装拆,其有4只车轮,且相对的两只轮子之间有轴连接着,所以导向性好。不过也正是因其有4只车轮,H型车身结构的轨检小车结构刚度比较地差。
方案2:同样刚度的条件下,车身结构是T型的轨检小车对比H型,前者结构的轨检车会显得较为灵活,而且十分方便人员的操作。T型轨检小车有装拆方便,结构相对的紧凑,在对抗振动的时候刚度会很大,重量较轻便于人员的携带。而现有的轨道检测车车身结构也是T型综合以上的原因,本次设计考虑采用车身结构为T型。通过UG设计的小车模型,如图2.1所示。
轨检小车车轮中间需要开出一个孔来,这样可以保留轮子的整体强度,也降低了整个车轮的重量,便于安装。本次设计的车轮外圈要比内圈厚一些,这样的好处是当轨检小车进行加速的时候,小车的平稳性很好,保持在高速运行的时候,小车有较大的惯性。设计轨检小车的车轮如图2.2所示。
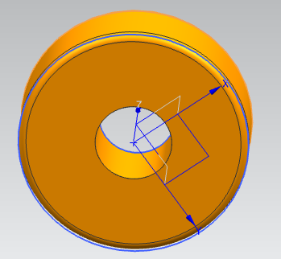
图2.2 小车车轮
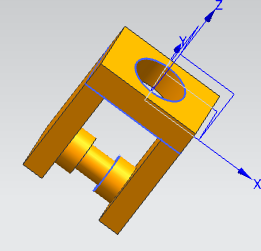
图2.3 车轮导向装置
轨检小车在轨道上运行,当遇到弯道时,需要转向,所以要给小车车轮加上一个导向装置,其是决定着小车是否能沿着铁路弯道平稳得行走。图2.3为小车车轮的导向装置。
小车要求结构紧凑,要有足够的刚度和较高的强度。导向装置的结构要布置合理,使小车的运动平顺可行。图2.4为小车的支撑结构。
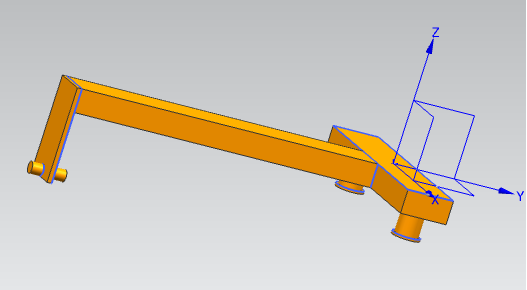
图2.4 小车的支撑结构
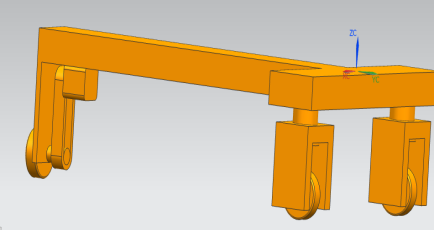
图2.1 轨检小车车身结构
第四章 轨检小车控制模块软件的设计
4.1 PLC介绍
PLC,中文定义是可编程控制器,简称是PLC,其是一种新型的以计算机技术为基本的工业自动化控制装置,采用的是可以编写程序的存储器械。其中存储的内部空间用来进行执行了顺序和逻辑运算,还可以对计时和算术运算等发出指令,然后通过输入输出,来控制各式各样的机械设备或者生产过程。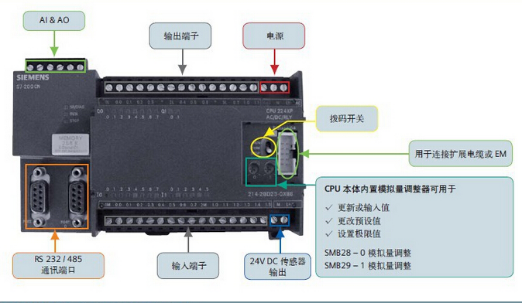
4.2 PLC分类及其选型
PLC按照结构形式来分,可分为整体,模块和叠装三种形式的PLC,其中叠装形式的PLC是前面两者优点的结合体。按照功能来进行分类的haunted,可以将PLC分成低中高三个不同类别。本次设计使用的PLC是西门子的S7-200,如下图所示,。S7-200系列PLC有着极其强大的功能,它既可以在独立的运行中实现功能,也可以在与其他相连成网络的同时进行复杂控制。所以这次PLC我将使用S7-200系列来进行对步进电机进行控制。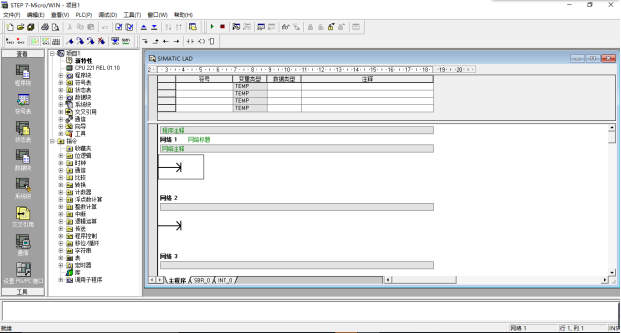
图4.1 S7-200 PLC端子和硬件介绍
4.3 PLC编程软件
本次设计使用的PLC编程软件是STEP7Micro/Win编程软件。此软件给予了用户很好的编程条件来进行开拓和编写新的应用程序。为了用户可以方便快捷的开发新的应用程序,STEP7Micro/Win编程软件上有三个不同的编辑器以供用户使用。此软件上有以下几个组成部分:SIMATIC管理器,符号编辑器,通信和硬件组态,编程语言和硬件的诊断工具。STEP7Micro/Win编程软件界面由菜单栏,工具栏,浏览栏,用户操作窗口和状态栏等几部分组成。此软件简单易懂,可以解决相对复杂的用户在自动化方面。此编程软件的界面可由下图所示。
图4.2 STEP7Micro/Win编程软件界面
4.4 PLC软件设计
4.4.1 程序流程图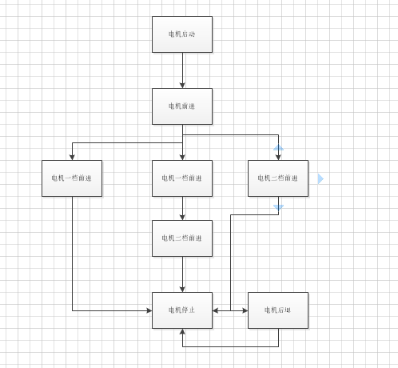
图4.3 轨检小车工作模式
本次的系统使用的是梯形图的编程,编程软件为STEP7Micro/Win编程软件,先在计算机上进行程序的编写和调试,当程序调试成功后,使用接线口把编写好的控制程序下载到PLC当中。本次设计的PLC程序包括了主程序,慢速档,快速档和停止档的子程序主要要使步进电机分成两个速度档,来满足轨检小车在轨道上不同速度的工作需求,进而来高质量地完成轨道检测工程。工作开始后,电动机启动,轨检小车开始在轨道上前行,进行作业。小车有两个档的速度可以选择,当检测一条全新的轨道时,小车可以以一档慢速前进,增加其测量的精度。在通过无需检测的轨道时,以二挡的速度快速通过,大大地节省了工作的时间,提高了轨检小车的作业效率。轨检小车以一档的速度起步,使用两档的速度在轨道上进行工作,这三种工作方式(如图4.3所示)根据现场的工作需求来进行自由转换,以适应不同的工作环境。等小车作业结束后,电动机既可以停止转动,让小车停下来,等待操作人员,也可以通过电动机反转来带动小车返回初始位置。
第五章 轨检小车控制系统调试
5.1 调试准备工作
元器件准备:
1、220V转化为24V的电源模块(如图5.1所示);
2、西门子S7-200PLC(如图5.2所示);
3、步进电机驱动器(如图5.3所示);
4、两相混合式步进电机(如图5.4所示)。

图5.1 控制电路中220V化为24V的电源模块

图5.2西门子S7-200PLC
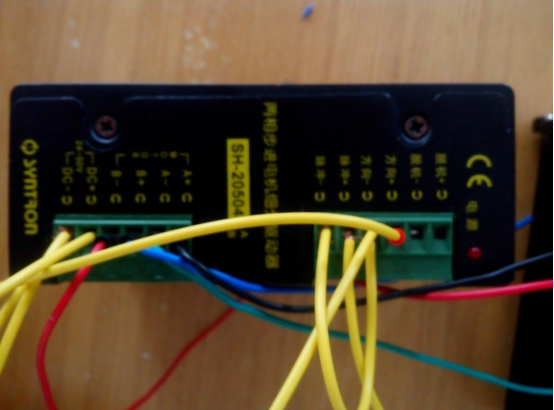
图5.3 步进电机驱动器接口

图5.4 两相混合式步进电机
所有的元器件准备好之后,进行元器件之间的接线,接线完成后仔细地复查一遍,确认接线没有错误,再开始下一步的调试。
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。