LS-DYNA | 载荷与边界条件
1、概述
• 与隐式静力分析不同,所有显式动力分析施加的载荷必须是时间的函数,ANSYS中时间载荷步的概念将不再适用。
• 在显式动力分析中只能使用两个数组来定义载荷。一个数组是时间变量,另一个是载荷变量。
• 阻尼是用来减小与载荷对应的动力响应。
• 因为时间的相关性,许多ANSYS 中的加载命令 (如:F and SF)在LS-DYNA中不再适用。
• 另外,D命令不能用来加载,因为它不与时间相关,它只能用来施加约束(永久性的零位移约束).
• 在显式动力分析中,耦合(CP)和约束方程(CE)仅对位移的平动(U)和转动(ROT) 有效。在大变形中使用耦合(CP)和约束方程(CE) 要分外小心,另一种约束方法(如, 用EDCNSTR)将在本章后面讨论。
• 初始速度 (EDVEL) 和刚体 (EDMP, RIGID) 的定义在显式动力分析中非常重要,它们可以通过避免渐增载荷和减少模型的自由度数来减少CPU 时间。
• ANSYS/LS-DYNA 通常被用来求解瞬态动力分析问题 (EDDRELAX, OFF,它也可以求解静力问题,但这类问题最好使用隐式方法求解,如:ANSYS。
• 一个真动力松弛分析 (EDDRELAX, DYNA) 使得LS-DYNA显式求解器可以通过增加阻尼直到动能降为零来执行一个静力分析。一旦动力松弛分析已经确定了系统的初始应力状态(如预应力),就可以接着进行全瞬态动力分析。
• 对预加载几何结构应力初始化 (EDDRELAX, ANSYS) 类似于真动力松弛分析,但它需要通过前面的隐式静态分析预先获得预载变形。这种类型的分析称为隐式-显
2、WB环境加载
WB环境加载GUI操作相对简单,方便操作
任何一种载荷直接和表格相连,直接输入和时间相关的参数。
3、ANSYS经典环境加载
• 在ANSYS/LS-DYNA中,所有瞬态加载必需使用EDLOAD命令,并按以下步骤:
– 创建组元( component)或Part
– 定义数组参数
– 使用EDLOAD命令加载
创建组元( component)或Part:
• ANSYS/LS-DYNA 中的许多载荷是加在节点组元上的 。但压力是施加在单元组元( element components )上,而刚体载荷是被施加在Part上。
• 就当前所选的节点使用 CM 命令创建节点组元
• Utility Menu > Select > Entities > Nodes
Utility Menu > Select > Comp/Assembly > Create Component…
• 最好给创建的集合定义一个意义明确的名字,这样可以避免将载荷加到错误的结构上。
定义数组参数 :
• 在 ANSYS/LS-DYNA中,所有载荷都是按特定时间间隔施加 ,并成组地定义时间数组参数及相应的载荷数组参数 (*DIM and *SET):
Utility Menu > Parameters > Array Parameters > Define/Edit > Add
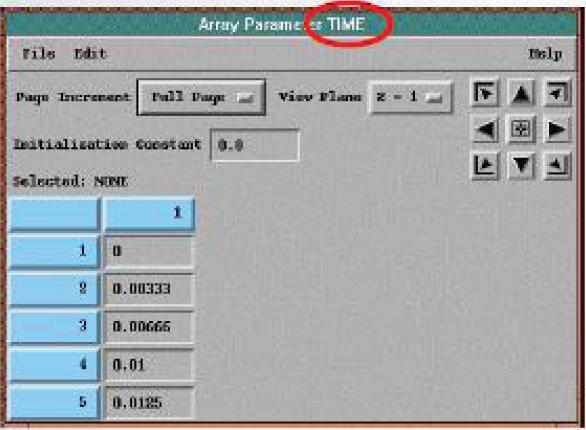
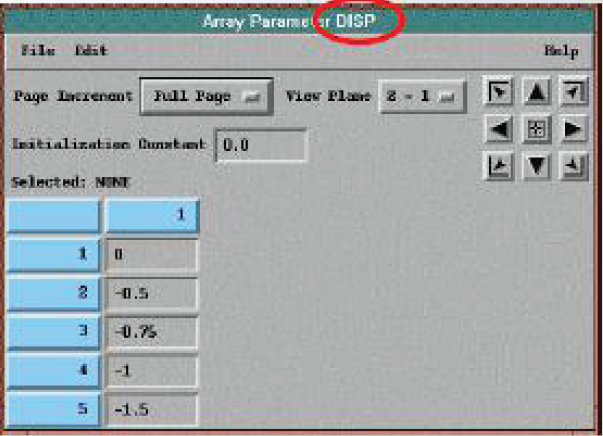
• 每一个时间值与一个载荷值对应。
• 载荷应施加在整个求解时间中。当达到定义的时间终点时,载荷将会迅速置为零,为避免结构的突然卸载,可以适当延长载荷的终止时间超过分析结束的时间,特别是在随后需要进行重起动的分析中应该注意这一点。
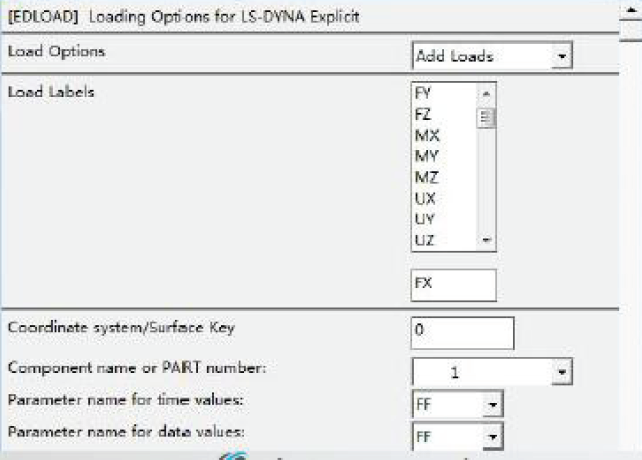
– 使用EDLOAD命令加载:
• 完成组元(component)或Part和参数数组定义后可以使用EDLOAD 命令来加载:
Solution > Loading Options > Specify Loads
• 先选择载荷选项中的(Add Loads)这一选项同时也可以列出载荷(listing Loads) 和删除载荷( deleting load)
选择所要施加载荷的类型:
对节点组元( Components) :
Forces: FX, FY, FZ
Displacements: UX, UY, UZ
Velocities: VX, VY, VZ
Accelerations: AX, AY, AZ
Base Accelerations: ACLX, ACLY, ACLZ
Moments: MX, MY, MZ
Rotations: ROTX, ROTY, ROTZ
Angular Velocities: OMGX, OMGY, OMGZ
Temperatures: TEMP
对单元组元( Element Components) :
Pressures: PRESS
对 Parts (刚体) :
Forces: RBFX, RBFY, RBFZ
Displacements: RBUX, RBUY, RBUZ
Velocities: RBVX, RBVY, RBVZ
Moments: RBMX, RBMY, RBMZ
Rotations: RBRX, RBRY, RBRZ
Angular Velocities: RBOX, RBOY, RBOZ
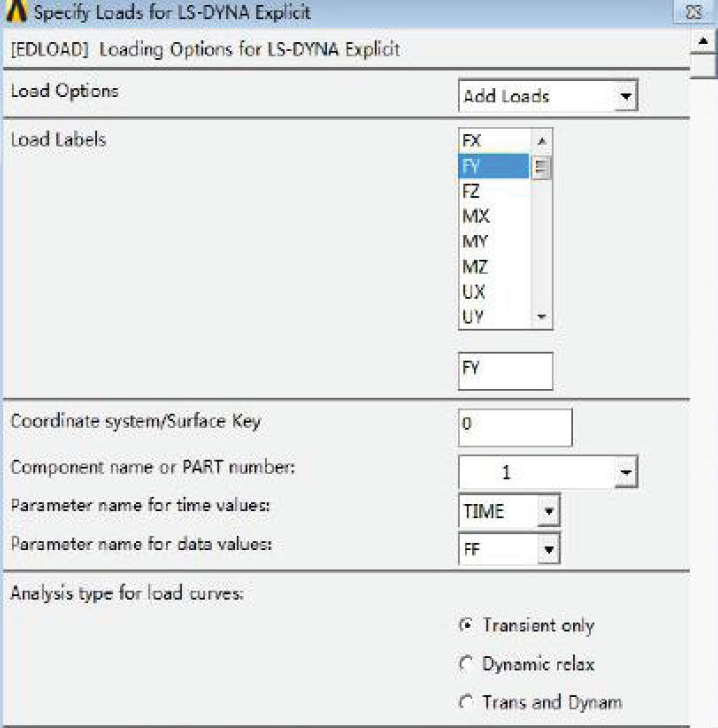
• EDLOAD 菜单的这个选项或者定义一些特定载荷类型(参见命令手册中的规定)的局部坐标系( 通过EDLCS定义),或者施加压力时的单元面号(surface) 。
• 下面的空格根据载荷类型或者定义节点、单元组元号或者定义Part 号,如前所述。
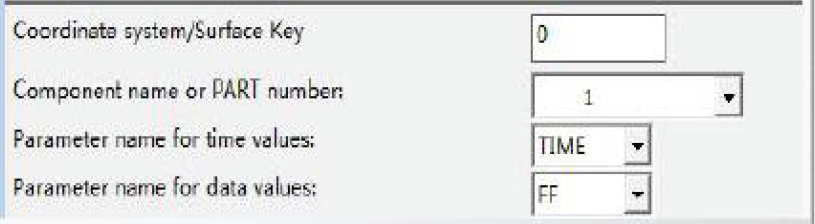
• 选定时间( TIME )和相应载荷(LOAD)数组 ,如果该栏空着,则可以指定预先定义的载荷曲线 号(用 EDCURVE创建) ,通过这种方法可以免去定义多次施加在不同组元上的相同载荷。
• 预先定义的载荷曲线可以有载荷缩放系数(没有时间缩放系数)。
• 对多种载荷要指定它的开始时间和终结时间,在瞬态分析中,这种方法比赋零值要好。
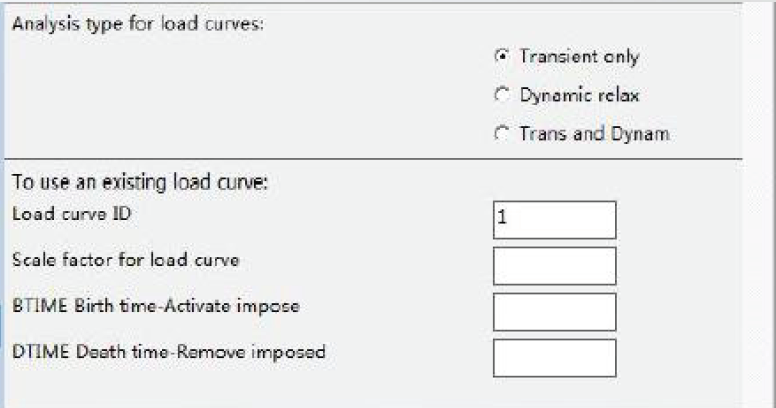
• 最后,你要指定分析阶段,默认值是瞬态阶段 “Transient only” ,如果你的载荷是应用于动力松驰分析(用来模拟隐式静态求解)选“Dynamicrelax”。如果包括两种分析,请选 “Trans and Dynam” 。
• 如ANSYS/LS-DYNA 用户手册第四章讲到的, 在动力松驰分析中如果载荷曲线定义了渐变(从零载荷)到稳定的动力松弛阶段,则使用最后一项(Trans and Dynam) 可能会出问题。在松驰阶段后时间重置为0,开始瞬态分析,以前预加的载荷被移走,重新渐变加载进行瞬态分析,这样可能会引起不必要的振动。
• 最好的途径是使用两条曲线:一条反映“Dynamic relax” 阶段的从零渐变的载荷,另一条开始于前一条曲线结束点的反映“Transient only”阶段的载荷。
• 在动力松驰分析和指定几何应力初始化分析中,仍然存在时间与载荷的概念。由于在随后的瞬态动力学分析中将时间重置为零,你可以认为这是一个假定的初始时间。
• 在定义了载荷曲线后,你可以用EDPL命令来显示这条载荷曲线:Solution > Loading Options... > Plot Load Curve > LCID
• 当选择了Plot LoadCurve选项时,载荷参考号(LCID )会自动显示在右图的表中。
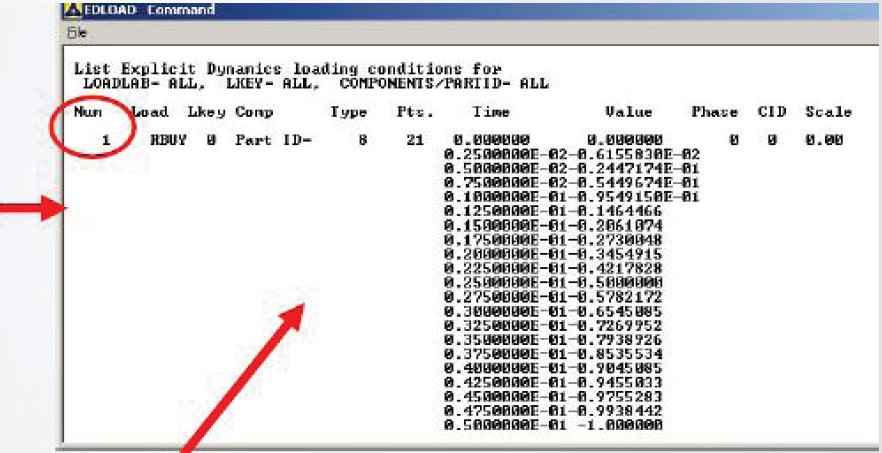
• 此列表能够使你验证所加载荷的信息,其中包括载荷类型,加载的组件,以及时间与加载的数据值。记住要经常检查此列表!
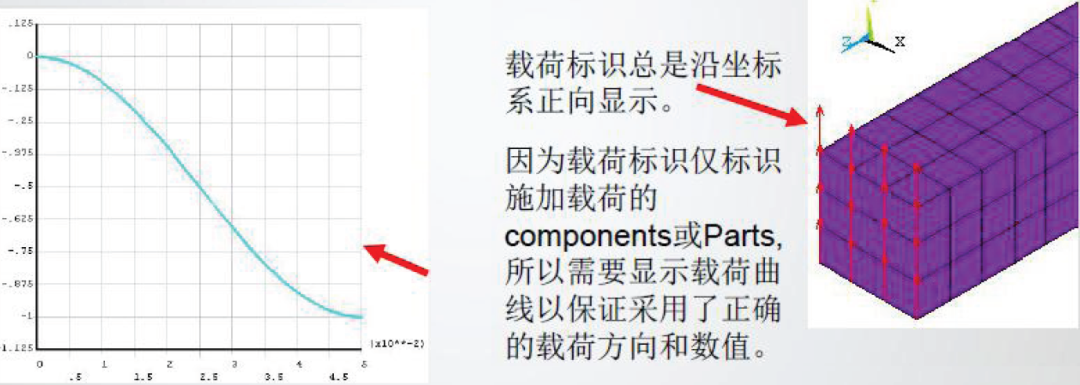
• 通过执行EDFPLOT, ON 可以显示载荷标识
• Utility Menu > PlotCtrls > Symbols … > LS-DYNA LoadSymbols > Show
• 在开始瞬态分析时,初始速度有利于稳定加载。
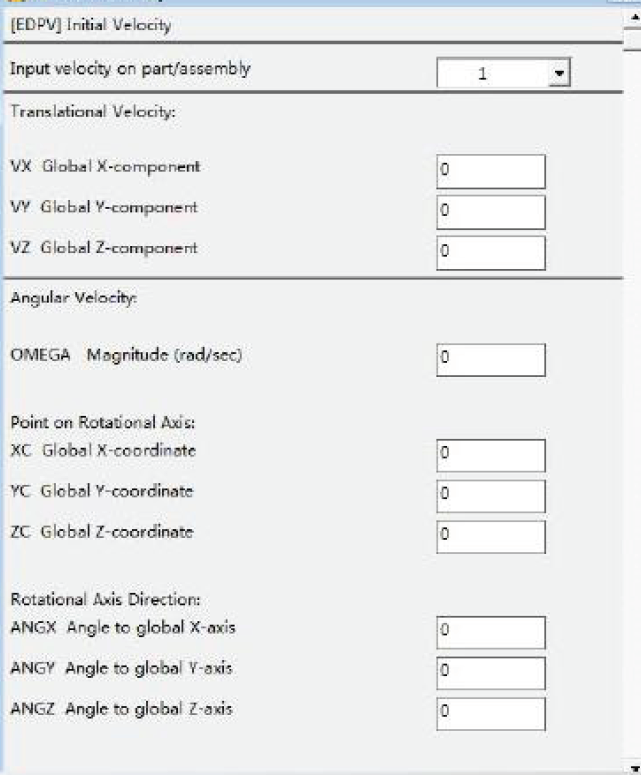
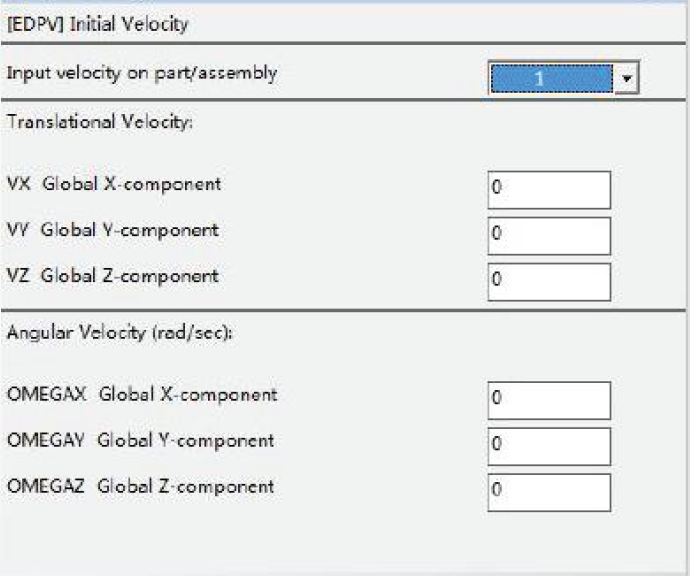
• ANSYS/LS-DYNA 允许使用EDVEL命令对节点或节点组(component)施加平动或转动的初始速度,同样也可以使用EDPVEL 命令对 Parts 或Part 集合施加初始速度.
• EDPVEL 命令实际上是对属于某个Part 的节点建立一个集合,所以它可以象EDVEL命令一样使用,输入参数类似,在这儿不再讨论。
• 使用EDVEL命令有两种方法定义初始速度:
– VGEN :在GUI操作中使用 w/ Axial Rotate
– VELO :在GUI操作中使用 w/ Nodal Rotate
EDVEL, VGEN 命令:
• VGEN 命令定义相对于总体坐标系的平动和对任一轴的转动。
• VGEN 命令可以对转动的component施加速度。
• VGEN命令不能用在简单或完全重起动分析中 。
EDVEL, VELO 命令:
• VELO 命令可以施加节点或节点组元相对于总体坐标系的初始平动或转动速度。
• VELO 命令将旋转自由度直接施加于节点上,所以只对 BEAM161和SHELL163 单元适用.
• VELO 不能用在完全重启动分析中。
EDVEL, VGEN命令 : w/ Axial Rotate
• 指定所要施加初始速度的节点或节点组元。同样存在listing 和deleting选项。
• 在总体Cartesian坐标系中施加X, Y,Z方向 的平动速度。
• 定义角速度,旋转轴的X、Y、 Z 坐标和相对于 总体笛卡儿坐标系 X、Y、 Z的角度。
EDVEL, VELO命令 : w/ NodalRotate
指定所要施加初始速度的节点或节点组元。同样存在listing 和deleting 选项。
• 输入总体坐标系X, Y, Z 方向的平动速度。
• 输入相对于总体坐标系X, Y, Z方向的角速度(ω) 。
VGEN和VELO :
• 对相同的节点或节点组元重新执行 EDVEL 命令将会覆盖以前设定的值 。
• VGEN 和 VELO 命令不能在同一个分析中使用.
• 如果EDDRELAX, ANSYS (隐式到显式顺序求解) 在 EDVEL, VGEN命令之前使用, 那么ANSYS将自动设*INITIAL_VELOCITY_GENERATION命令PHASE 项:
PHASE=0 用于刚体节点 (初始速度基于最初的几何模型)
PHASE=1 用于可变形体的节点 (初始速度基于变形体的几何模型)
– 因此,一个节点组元不应该把刚性体和变形体混合在一起。
• 阻尼是在瞬态动力学分析中用来减小结构分析中不切实际的振动。
• 可以通过EDDAMP 命令在 ANSYS/LS-DYNA中定义质量 阻尼(alpha)和刚度阻尼 (beta) :
Preprocessor > Material Props > Damping ...
• 定义施加阻尼的 Part 号. 如果 Part = ALL (or blank), global alpha 阻尼将被应用于整个模型。
• LCID (EDCURVE) 命令用来指定相对于时间的alpha阻尼
• 或者,不变的阻尼系数, VALDMP(alpha or beta), 可以用来代替对时间的alpha阻尼曲线 或者使用alpha LCID 命令中的比例系数.
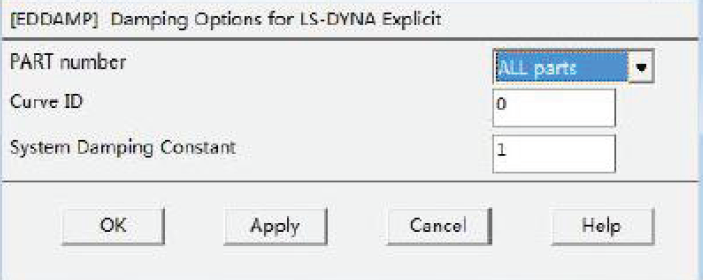
• 当 Part = ALL 或曲线 ID (LCID)被指定时,alpha 阻尼会自动的应用于模型。质量比例 阻尼对于低频率振动是有效的,并会抑制刚性体运动。不能被同时定义常数和与时间相关的alpha阻尼。
• 当LCID = 0(or blank) 且阻尼系数被指定时,beta 阻尼被应用于指定的 Part。刚度比例阻尼对于高频率振动是有效的。与时间相关的刚度阻尼是无效的。
• 如果对一个 Part要同时定义 alpha 和 beta 阻尼时, 可以使用 EDDAMP,PART, LCID来定义 alpha 阻尼 , 用MP, DAMP, MAT, VALDMP来定义相对于材料(不是Part)的beta阻尼。所以最好每种材料定义在单独Part中,以免互相冲突。
• 为了看到EDDAMP命令所指定的阻尼,执行:edsolv$stat ! Utility Menu->List->Status->LS-DYNA列出了显式动力加权阻尼
Load Part Lcid Valdmp
Damping ALL 0 20.0000000
Damping 1 0 0.100000000E-04
Damping 2 0 0.100000000E-04
Damping 3 0 0.100000000E-04
Damping 4 0 0.100000000E-04
Damping 5 0 0.100000000E-04
Damping 6 0 0.100000000E-04
Damping 7 0 0.100000000E-04
• 上面的信息显示在ANSYS输出窗口(或输出文件).
• MPLIST 只列出 由 MP,DAMP 命令指定的BETA 阻尼.
• 这里所显示的大的质量比例 (ALPHA) 阻尼将迅速减小动力响应。
• 施加在每一个Part 上的刚度 (BETA) 阻尼用来消除高频振荡。
• 这里所显示的大的质量比例 (ALPHA) 阻尼将迅速减小动力响应。
• 施加在每一个Part 上的刚度 (BETA) 阻尼用来消除高频振荡。
刚体的一般介绍:
• 刚体用于定义模型中的刚性部分 并且可以减少执行一个显式分析所使用的CPU时间。
• 在ANSYS/LS-DYNA中,所有刚体的节点自由度都与其质心自由度耦合在一起。因此,刚性体无论其单元节点数量多大,都只有六个自由度。
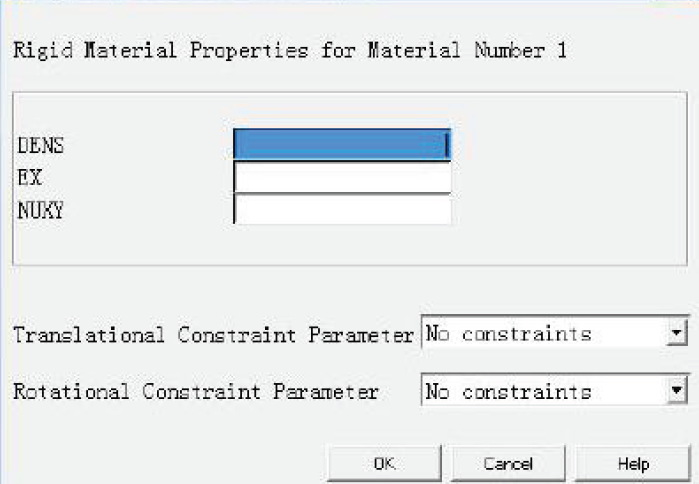
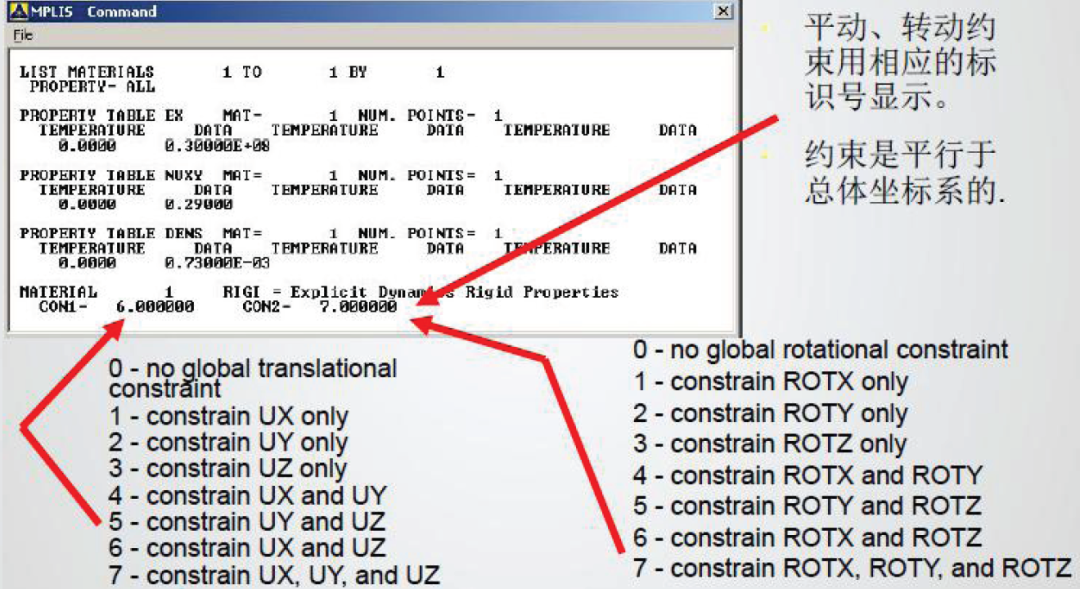
• 程序通过组成刚体的单元的体积和密度自动计算出质量、质心和惯量特性。这些特性都可以由EDIPART 命令定义的值覆盖。
• 作用于刚体上力和力矩由每一时间步的节点值叠加而得, 刚体的运动通过质心计算而得,并把相应的位移值传递给节点。
• 必须输入精确的刚体材料特性 (EX, NUXY, and DENS)。杨氏模量用来计算接触罚刚度(penalty stiffness),所以它的值不应该是任意大。
• 通过这些命令定义刚体: EDMP, RIGID, MATID, CON1, CON2
Preprocessor > Material Props > Material Models > LS-DYNA > Rigid
Material
• GUI在一个 窗口里同时包括 MP命令 (定义 EX, NUXY, andDENS) 和 EDMP, RIGID 命令(施加刚体约束)的定义。
• 具有相同MATID的单元,尽管互相不相连,可以定义在一个刚性体中。
• 平动和转动约束被施加在刚体质心。
• GUI根据定义方式显示材料特性,命令( MPLIST )则以另一种格式输出。
刚体加载 :
• 如前所述,所有的刚体位移都应用于Part号 而不应用于component。在使用EDLOAD命令施加刚体载荷前要经常检查 Part 列表,因为EDMP, RIGID,MATID 命令定义材料刚性 (不是 Part)。此外, 划网格时对不同的PART尽量要使用不同的材料
• Solution > Loading Options > Specify Loads > Add Loads
可以施加的刚体载荷 :
RBFX, RBFY, RBFZ (Forces)
RBUX, RBUY, RBUZ (Displacements)
RBVX, RBVY, RBVZ (Velocities)
RBMX, RBMY, RBMZ (Moments)
RBRX, RBRY, RBRZ (Rotations)
RBOX, RBOY, RBOZ (Angular Velocities)
对某些载荷类型可选择局部坐标系号(用EDLCS命令建立) 。
合并刚体 :
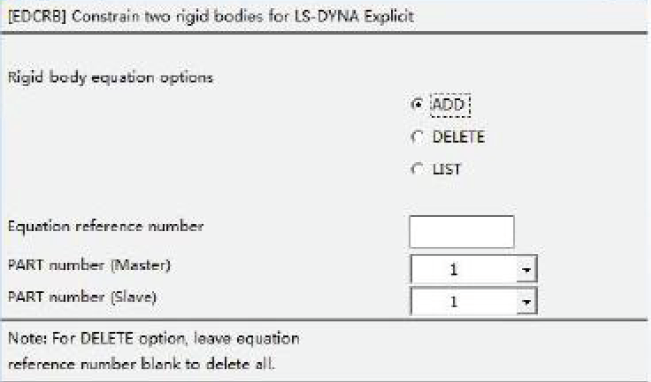
• 可以使用 EDCRB 命令将两 个刚体合并,合并后它们将被看作一个刚体:
Preprocessor > Coupling / Ceqn > Rigid Body CE
• 从Part 附属于主 Part. 从PART的参数将被忽略。
• 根据需要,可以将多个从PART合并到主PART中,但不要创建新的主PART。
• 为避免覆盖合并了的刚体,不要重复使用 EDCRB 命令定义同一参考号。
刚体的惯性量 :
• 使用EDIPART 定义刚体的惯性量。
– 缺省情况下, LS-DYNA自动地通过有限元网格(单元体积,密度,位置)来计算刚体的惯性。
– 当模型比较复杂或网格比较粗糙时,人工定义刚体的惯性比缺省值要准确。
– EDIPART 允许仅对部分结构进行网格划分。
– 使用EDIPART命令时必须已经定义了Parts 。
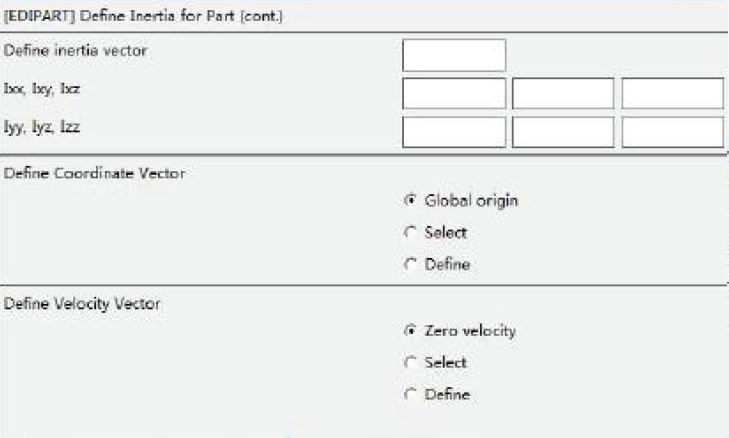
Preprocessor > LS-DYNA Options > Inertia Options > Define Inertia
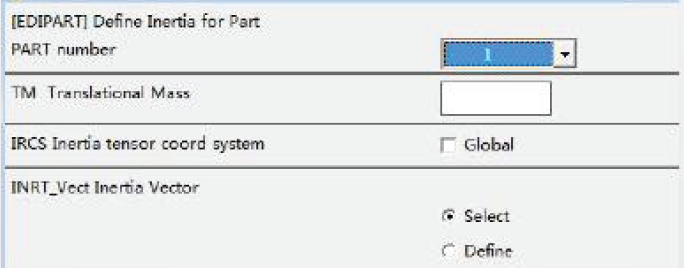
• 指定刚体的惯性量和初始状态:
– 质心的位置 (X, Y, Z)
– 平动质量
– 惯性张量 (IXX, IXY, IXZ, IYY, IYZ, IZZ)
– 初始速度 (RBVX, RBVY, RBVZ, RBOX, RBOY, RBOZ)
• 如果没有选择global origin,GUI自动跳出一个窗口要求指定相应坐标向量。
•总结 :
• 与ANSYS中的隐式分析不同, 在定义PART时不要使用过高的弹性模量值(EX )来使之刚化,需要精确的材料特性来计算接触刚度。 使用 EDMP, RIGID 命令来定义相应材料刚性。
• 不能给刚体的节点施加约束,所有的约束都必须施加到刚体的质心上。
• 两个刚体不能共享同一节点,用EDCRB 命令可以将刚体合并到一起。
• 将结构中变形不重要的部位定义为刚体 (如:金属成形中的冲头与模具),这样可以大大节省CPU时间。
• 在 ANSYS/LS-DYNA中, 非零位移作为与时间相关的载荷施加,然而有许多种约束方式可以用来定义其它的边界条件。
ANSYS/LS-DYNA 约束 :
– 约束
– 节点坐标系旋转
– 对称边界面
– 非反射边界面
– 额外节点组元
– 节点刚体
– 壳与实体的连接
– 铆接
– 点焊
• 注: 同一节点或同一自由度不允许多重约束。
约束 : Solution > Constraints > Apply > On Nodes (etc.) …
• D 命令只能对节点施加零位移 (转动和平动)。如前所述,非零位移要用EDLOAD 命令施加,由于速度和加速度不是物理自由度,所有不能约束它们,然而分析中可以计算这些数值并将之作为节点的自由度存储以便进行随后的后处理。
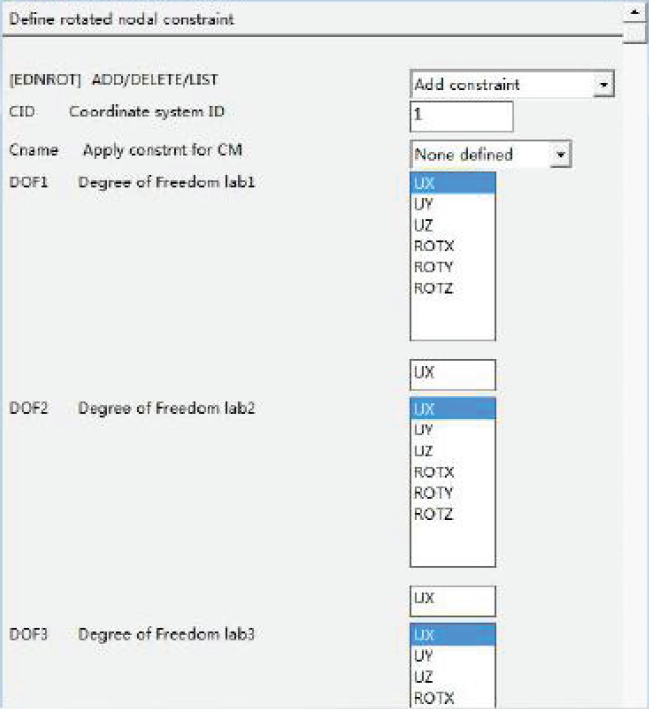
Nodal CS Rotations : Solution > Constraints > Apply > Rotated Nodal
• EDNROT 命令在用EDLCS命令定义的旋转节点坐标系中定义零位移约束。
• 除了定义(adding)旋转节点约束外,还可以列出(list)和删除(delete) 它们。
• 因为局部坐标系(CID)不能自动被激活,它须要指定它。
• 节点旋转只对指定的节点组元有效,对选择的节点集无效(如ANSYS中使用select entity选择的节点集)。
• 最多可以定义六个自由度 (UX, UY,UZ, ROTX, ROTY, 和ROTZ)
• 注: 求解结果不能根据EDNROT命令所使用的局部坐标系给出。
对称边界面 : Solution > Constraints > Apply > Symm Bndry Plane …
• EDBOUND 命令定义平面对称和循环对称,它允许只对模型的某一对称部分建模。
• 对于滑移(sliding)对称,由垂直于过总体坐标原点的矢量来定义边界面,并且定义一个与此面相关联的节点组元( Cname )。
这种情况下,不必定义第二个节点组元。约束选项(COPT)定义节点移动方式 :
COPT=0: 节点沿垂面移动,
COPT=1: 节点沿矢量方向移动
• 对循环对称 (EDBOUND, CYCL), 通过总体坐标原点矢量定义旋转轴,定义循环对称时要用到两个节点组元 (Cname1 和 Cname2) ,第二个节点组元的节点不仅要在周向偏移相同的角度,其节点号与第一组集合相应的节点必须要按某一定量增加。
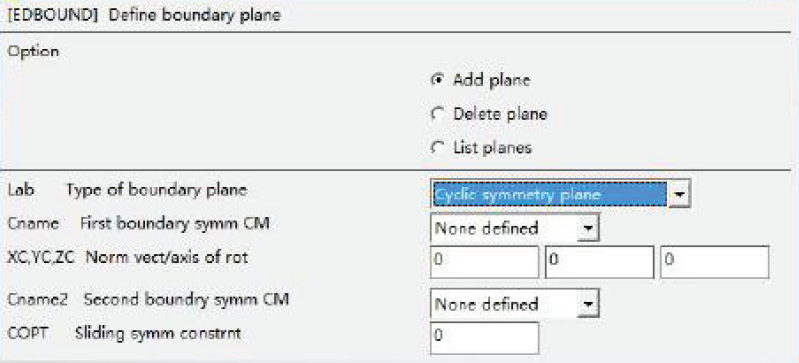
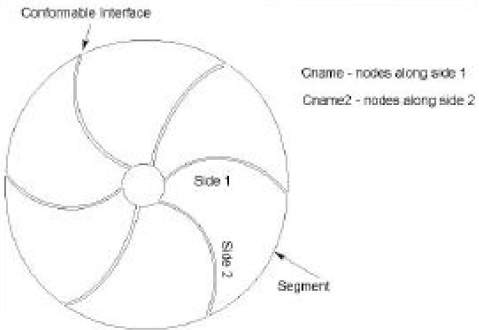
不用定义约束选项(COPT)
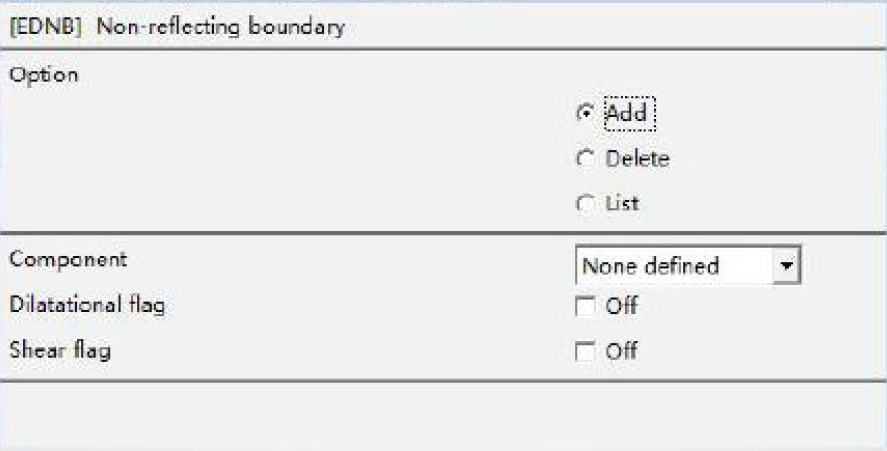
非反射边界 : Solution > Constraints > Apply > Non-Refl Bndry
• 用 EDNB 命令定义非反射边界, 它可以防止人为应力反射波 (产生于模型外部边界)重新进入模型从而破坏结果。
• 地质力学特别的需要一个无限域表示地层,非反射边界可以大大减小模型尺寸同时又可以表达无限域。
• 非反射边界只用于SOLID164单元外部表面上的节点,指定集合中的节点不应该用其它方式约束,否则会消除阻尼器吸收入射应力波的效果,通常有限域的高质量足以限制运动。
• LS-DYNA 假设这些外部边界上的材料是线性的,所以有限域应该足够大以满足这一假设。
• 阻尼器定位为垂直于膨胀波,相切于剪切波,可同时激活这两种类型的标记。
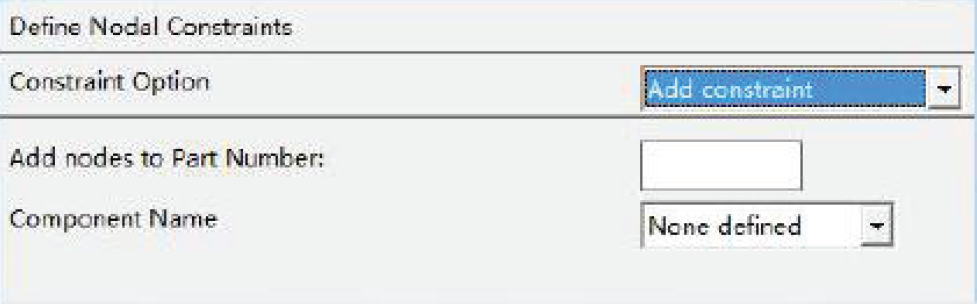
额外节点组 : Solution > Constraints > Apply > Additional Nodal … >Extra Node Set …
• 用 EDCNSTR, ,ENS 命令来创建额外节点组( Extra Node Set), 它在已有刚体上增加一组节点。
• 这些点可以在空间任何位置,它们可被当作加载点、集中质量位置或变形体的依附点。
• 这些额外节点的坐标随刚体移动而更新,所以它只能从属于一个刚性体。
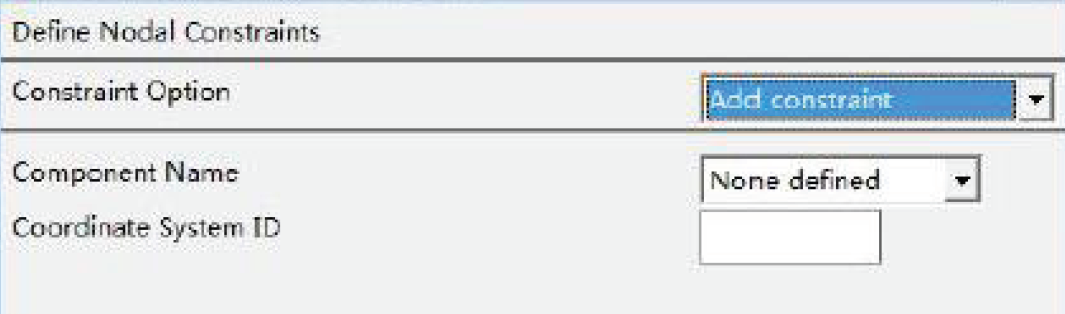
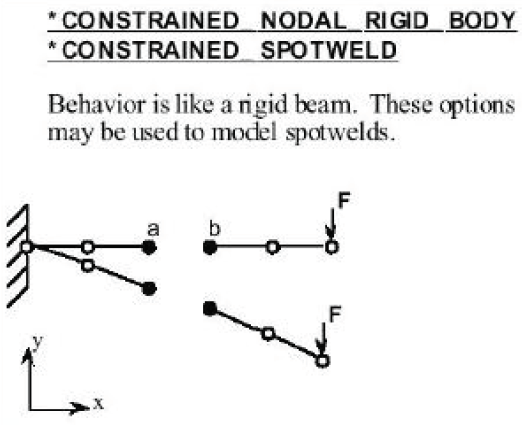
节点刚性体: Solution > Constraints > Apply > Additional Nodal … >Nodal rigid body …
• 用 EDCNSTR, ,NRB 命令创建节点刚性体,它是变形parts节点之间的一种刚性连接(焊点)。
• 节点刚性体与存在的part 和材料无关,质量特性取决于节点的质量与位置。
• 数据的输出参照指定的局部坐标系 (CID from EDLCS)。
• 优于 CE’s – 节点组的旋转可以根据刚体动力学来更新
– 约束方程 (CE) 能带来非物理的响应
– 非重合节点“a” 和 “b” 的约束比较,如下图所示:EDCNSTR , , NRB command:

• 由于约束方程(CE’s )和耦合(CP’s)特性较差, 此处不作介绍。
壳与实体的连接 : Solution > Constraints > Apply >Additional Nodal …>Shell-Solid tie
• 用EDCNSTR, ,STS 命令创建壳与实体的连接。
• 壳163 单元的节点沿一直线最多可以与实体164 体单元的9 个节点(其中一节点与壳节点重合)相连而不必将壳嵌入实体就可以传递扭矩。
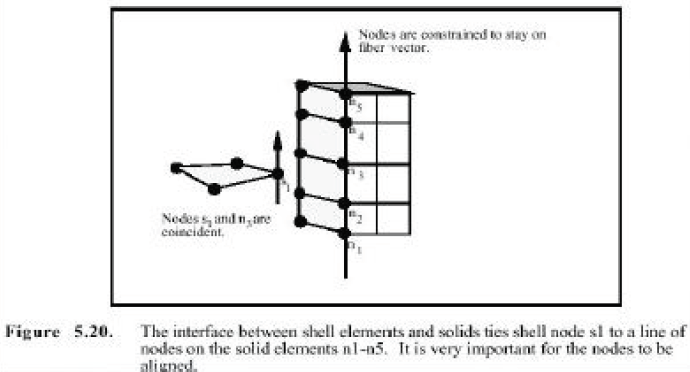
• 类似于节点刚体约束
• ANSYS自动将SOLID164单元的节点排列为需要的空间顺序
铆接 : Solution > Constraints > Apply > Additional Nodal … >Massless rivet
• 用 EDCNSTR, ,RIVET 命令创建无质量的铆接。
• 两个非重合节点象焊点一样连接在一起,但不具有失效能力(点焊在后面讨论)。
• 铆接推荐用于连接固体单元,因为它们没有旋转自由度。
点焊 : Preprocessor > LS-DYNA Options > Spotweld > Massless Spotwld or Genrlizd Spotwld
• 在 ANSYS/LS-DYNA中用 EDWELD 命令创建节点约束来模拟焊接,用这个命令有两种选项来创建无质量焊接:
– 无质量点焊
– 一般焊接
无质量点焊 :
• 对于无质量点焊选项,两个非重合节点被焊在一起从而创建一根无质量的刚性梁。
• 这两个节点必须有转动惯量(如只有壳和梁的节点可行)并且这些节点不能有自由度约束。
• 无质量点焊支持脆性失效机理,当满足下面的方程时,点焊失效(连接断开):
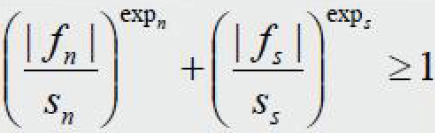
• 用户可以定义许用法向张力和剪切力 (分别为Sn 和 Ss )以及其相应指数。
• 对每一个新的点焊,用户必须使用新的参考号,使用相同的参考号会覆盖以前的点焊。
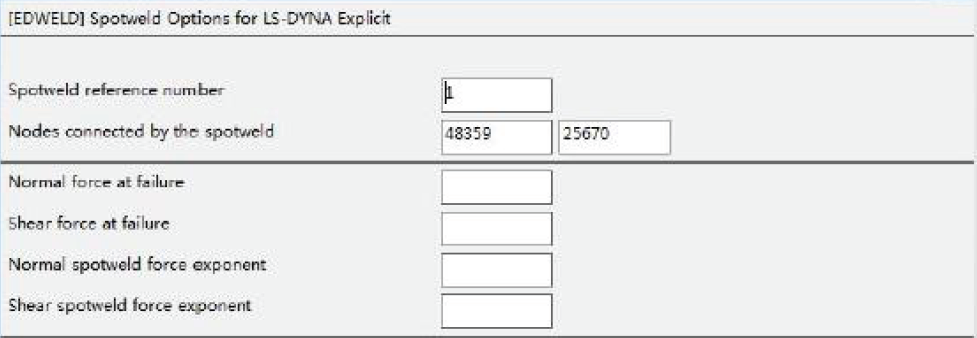
• 在点焊创建以后,可以通过GUI操作来显视点焊,可以用/PBC,WELD, ,1命令激活点焊的显示。

一般焊接 :
• 一般焊接与无质量点焊非常相似,但它们又有一些不同点。
• 在一般焊接中,多于两个节点被连接在一起(通过节点组元而不是节点号来定义) ,如果使用局部坐标系,节点可以是重合的。
• 除支持脆性失效外,一般焊接还支持因塑性应变引起的韧性失效,当外推节点应变超过了定义的许用节点应变时,连接断裂,这类似于焊缝与周围材料的撕裂。如果使用了多组点焊,失效将会从外到里递进发展。
• 一般焊接还允许指定焊接失效时间,这时无论是何种载荷条件,都将强制焊接破坏。
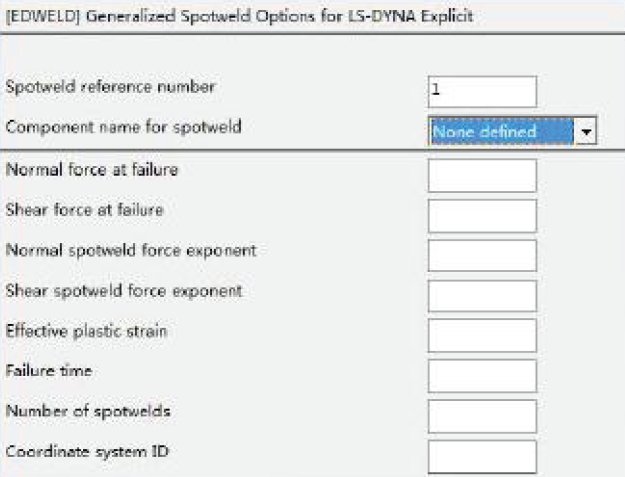
• 指定节点组元(component )
• 对每一个焊接,三种失效机制可以同时被激活(断裂、塑变和失效时间)
• 除支持脆性失效外,一般焊接还支持因塑性应变引起的韧性失效,当外推节点应变超过了定义的许用节点应变时,连接断裂,这类似于焊缝与周围材料的撕裂。如果使用了多组点焊,失效将会从外到里递进发展。
• 一般焊接还允许指定焊接失效时间,这时无论是何种载荷条件,都将强制焊接破坏。
• 指定节点组元(component )
• 对每一个焊接,三种失效机制可以同时被激活(断裂、塑变和失效时间)