STM32 GPIO(通用输入输出)详解:从模式原理到实战应用
前言:GPIO——STM32的"万能接口"
在STM32微控制器中,GPIO(General Purpose Input/Output,通用输入输出)是最基础也最核心的外设。几乎所有嵌入式项目都会用到GPIO:小到控制一个LED闪烁,大到驱动复杂的传感器阵列,GPIO都是连接MCU与外部世界的"桥梁"。
GPIO的核心功能是通过软件配置实现引脚的输入/输出控制,但它的灵活性远不止于此:通过不同的模式配置,同一引脚可以实现按键检测、LED驱动、模拟信号输入、甚至复用为UART/SPI等外设功能。
本文将从GPIO的硬件结构讲起,详细解析STM32 GPIO的8种工作模式(4种输入+4种输出)、速度配置、引脚复用原理,最后通过LED控制、按键输入、电平检测三个实战案例,帮助你彻底掌握GPIO的使用技巧。无论你是STM32新手还是有经验的开发者,本文都能带你对GPIO有更深入的理解。
一、GPIO硬件结构:引脚背后的"电路开关"
要理解GPIO的工作模式,首先需要了解其硬件结构。STM32的每个GPIO引脚都对应一套复杂的内部电路,通过寄存器配置可以切换不同的工作模式。
1.1 GPIO端口与引脚
STM32的GPIO分为多个端口(Port),每个端口包含16个引脚(Pin),命名规则为"端口字母+引脚编号",例如:
- PA0:A端口的第0号引脚
- PB5:B端口的第5号引脚
- PC13:C端口的第13号引脚(STM32F103最小系统板的LED常用引脚)
不同型号的STM32支持的端口数量不同:
- 入门级(如STM32F103C8T6):支持GPIOA、GPIOB、GPIOC等6个端口;
- 高性能(如STM32H743):支持多达14个端口,满足复杂外设需求。
1.2 GPIO内部电路结构
每个GPIO引脚的内部电路由保护二极管、上下拉电阻、输入缓冲器、输出驱动器组成:

- 保护二极管:两个反向并联的二极管,防止引脚输入电压过高(超过VDD)或过低(低于VSS),起到静电保护作用;
- 上拉/下拉电阻:可通过软件配置接入,用于输入模式时稳定引脚电平;
- 输入缓冲器:将外部信号引入内部电路,分为"施密特触发器"(数字输入)和"模拟开关"(模拟输入);
- 输出驱动器:由P-MOS和N-MOS管组成,控制引脚输出高/低电平(推挽模式)或仅拉低/拉高(开漏模式)。
这种结构使得GPIO引脚既能作为数字量输入/输出,也能通过模拟开关接入ADC,实现模拟信号采集。
1.3 GPIO寄存器:软件控制的"开关面板"
STM32通过寄存器控制GPIO的工作模式,每个端口(如GPIOA)有一组专用寄存器,核心寄存器包括:
| 寄存器名称 | 功能描述 | 关键位含义 |
|---|---|---|
| GPIOx_MODER | 模式寄存器(2位/引脚) | 00=输入,01=通用输出,10=复用功能,11=模拟 |
| GPIOx_OTYPER | 输出类型寄存器(1位/引脚) | 0=推挽,1=开漏 |
| GPIOx_OSPEEDR | 输出速度寄存器(2位/引脚) | 00=低速,01=中速,10=高速,11=超高速 |
| GPIOx_PUPDR | 上下拉寄存器(2位/引脚) | 00=浮空,01=上拉,10=下拉,11=保留 |
| GPIOx_IDR | 输入数据寄存器(1位/引脚) | 读取引脚当前电平(0=低,1=高) |
| GPIOx_ODR | 输出数据寄存器(1位/引脚) | 写入控制引脚输出(0=低,1=高) |
| GPIOx_BSRR | 位设置/复位寄存器(16位设置+16位复位) | 置1时设置/复位对应引脚,原子操作 |
这些寄存器是GPIO配置的核心,HAL库或标准库的底层本质都是通过读写这些寄存器实现功能的。
二、GPIO工作模式详解:输入与输出的8种配置
STM32 GPIO的工作模式分为输入模式和输出模式两大类,每类包含4种具体模式,不同模式对应不同的电路连接方式和应用场景。
2.1 输入模式:读取外部信号的4种方式
输入模式下,GPIO引脚用于检测外部电平信号,根据是否启用上下拉电阻和输入信号类型,分为4种模式:
(1)浮空输入(Floating Input)
- 电路特点:上拉/下拉电阻均不接入,引脚电平完全由外部信号决定;
- 工作原理:外部信号通过施密特触发器接入输入缓冲器,读取IDR寄存器可获取引脚电平;
- 适用场景:外部电路已包含上拉/下拉电阻(如I2C总线,外部有上拉电阻);需要检测交变信号(如方波);
- 注意事项:若外部无驱动信号,引脚电平会漂浮(受电磁干扰影响),可能出现不稳定状态。
配置代码(HAL库):
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT; // 输入模式
GPIO_InitStruct.Pull = GPIO_NOPULL; // 浮空(无上下拉)
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
(2)上拉输入(Pull-Up Input)
- 电路特点:内部上拉电阻(约40kΩ)接入,未接外部信号时引脚默认高电平;
- 工作原理:外部信号为低电平时,引脚被拉低;外部信号悬空时,上拉电阻将引脚拉至VDD(高电平);
- 适用场景:按键检测(按键一端接GND,另一端接GPIO,按下时电平为低);无外部上下拉的数字输入;
- 优势:无需外部电阻,简化硬件设计,避免电平漂浮。
配置代码:
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP; // 上拉输入
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
(3)下拉输入(Pull-Down Input)
- 电路特点:内部下拉电阻接入,未接外部信号时引脚默认低电平;
- 工作原理:外部信号为高电平时,引脚被拉高;外部信号悬空时,下拉电阻将引脚拉至VSS(低电平);
- 适用场景:外部信号默认应为低电平的场景(如检测高电平触发的传感器);
- 与上拉输入的区别:默认电平相反,根据外部电路选择(避免上下拉冲突)。
配置代码:
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLDOWN; // 下拉输入
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
(4)模拟输入(Analog Input)
- 电路特点:输入缓冲器的施密特触发器被关闭,模拟开关接通,引脚直接接入ADC模块;
- 工作原理:外部模拟信号(如0~3.3V电压)通过模拟通道传入ADC,可进行模数转换;
- 适用场景:连接模拟传感器(如光敏电阻、温敏电阻);需要采集电压信号(如电池电压检测);
- 注意事项:此时数字输入缓冲器不工作,读取IDR寄存器无效(需通过ADC获取数据)。
配置代码:
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG; // 模拟输入
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
2.2 输出模式:控制外部电路的4种方式
输出模式下,GPIO引脚用于驱动外部电路,根据输出结构和功能分为4种模式,核心区别在于输出驱动器的工作方式。
(1)推挽输出(Push-Pull Output)
- 电路特点:输出驱动器由P-MOS和N-MOS管组成,可输出高电平(VDD)和低电平(VSS);
- 工作原理:
- 输出高电平时,P-MOS导通,N-MOS截止,引脚接VDD;
- 输出低电平时,N-MOS导通,P-MOS截止,引脚接VSS;
- 优势:输出驱动能力强(可提供±20mA电流,STM32F103);高低电平切换速度快;
- 适用场景:驱动LED(直接串联限流电阻);控制继电器、三极管;输出数字信号(如SPI时钟线)。
配置代码:
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL; // 输出模式下,上下拉通常无效
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // 低速
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
(2)开漏输出(Open-Drain Output)
- 电路特点:仅N-MOS管工作,P-MOS管不导通;输出高电平时,N-MOS截止,引脚悬空(需外部上拉电阻);
- 工作原理:
- 输出低电平时,N-MOS导通,引脚接VSS;
- 输出高电平时,N-MOS截止,引脚电平由外部上拉电阻决定(通常接VDD);
- 适用场景:
- 电平转换(如3.3V MCU驱动5V外设,外部接5V上拉电阻);
- 线与逻辑(多个设备共用一根总线,如I2C的SDA/SCL线,通过开漏实现线与);
- 避免短路(多个设备同时输出时,开漏模式不会导致VDD和VSS直接连接)。
配置代码:
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; // 开漏输出
GPIO_InitStruct.Pull = GPIO_NOPULL; // 外部需接下拉电阻
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_MEDIUM; // 中速
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
硬件注意:开漏输出必须外接上拉电阻(1~10kΩ),否则无法输出高电平。
(3)复用推挽输出(Alternate Function Push-Pull)
- 电路特点:输出驱动器与推挽输出相同,但引脚功能由复用外设(如UART、SPI)控制,而非软件直接写ODR;
- 工作原理:GPIO引脚被分配给特定外设(如PA9复用为USART1_TX),外设通过内部信号控制输出驱动器;
- 适用场景:外设输出信号(如UART发送端、SPI时钟线SCK、定时器PWM输出);
- 配置步骤:先配置引脚为复用推挽模式,再初始化对应外设(外设会自动控制引脚)。
配置代码(USART1_TX为例):
// 配置PA9为USART1_TX(复用推挽)
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // 复用推挽
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 高速(串口需要较高速度)
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);// 初始化USART1(外设控制引脚)
MX_USART1_Init();
(4)复用开漏输出(Alternate Function Open-Drain)
- 电路特点:输出结构与开漏输出相同,引脚功能由复用外设控制;
- 适用场景:需要线与功能的外设(如I2C的SDA/SCL,复用为开漏输出,支持多设备共用总线);
- 注意事项:同开漏输出,需外部上拉电阻。
配置代码(I2C1_SDA为例):
// 配置PB7为I2C1_SDA(复用开漏)
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; // 复用开漏
GPIO_InitStruct.Pull = GPIO_PULLUP; // 内部上拉(或外部上拉)
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // I2C速度较低
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);// 初始化I2C1
MX_I2C1_Init();
2.3 输出速度配置:为什么需要关心速度?
GPIO的输出速度(Speed)用于控制输出驱动器的开关速度,通过OSPEEDR寄存器配置,分为4个等级(以STM32F1为例):
| 速度等级 | 最高频率 | 适用场景 | 功耗特点 |
|---|---|---|---|
| 低速(Low) | 2MHz | LED指示灯(切换频率低) | 低(开关损耗小) |
| 中速(Medium) | 10MHz | 普通数字输出(如按键反馈信号) | 中 |
| 高速(High) | 50MHz | 高速外设(如SPI、UART) | 高(开关损耗大) |
| 超高速(Very High) | 100MHz+ | 高性能外设(如HDMI、高速ADC触发) | 极高(仅高性能型号支持) |
速度选择原则:
- 满足功能需求即可,不必追求最高速度(高速会增加功耗和电磁干扰);
- 高频信号(如PWM、SPI时钟)需选高速;低频信号(如LED闪烁)选低速;
- 复用外设的速度需与外设工作频率匹配(如UART波特率115200,中速即可;SPI 10MHz,需高速)。
三、GPIO引脚复用:一个引脚,多种功能
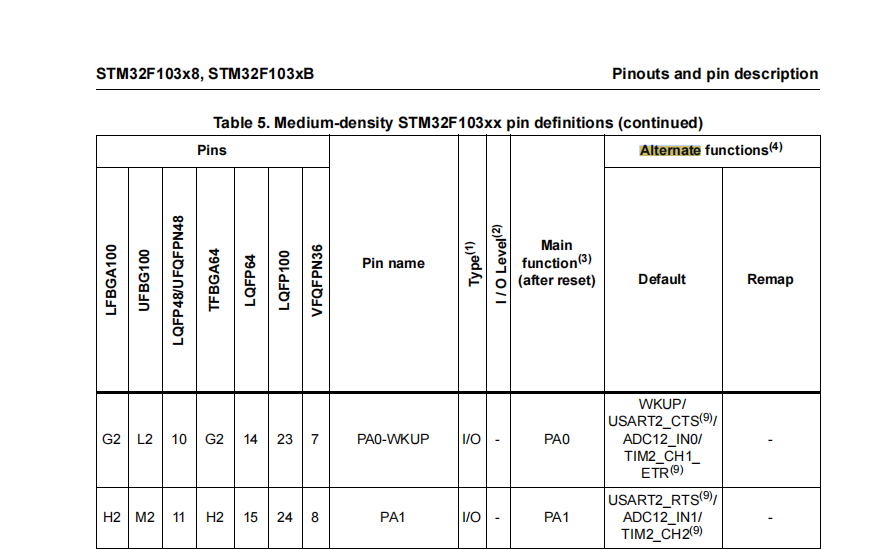
STM32引脚数量有限,为实现复杂功能,多数引脚支持复用功能(Alternate Function)——同一引脚可被不同外设共享(如PA0可作为普通GPIO,也可作为TIM2_CH1或ADC1_IN0)。
3.1 复用功能表:查询引脚支持的外设
每个STM32型号的引脚复用功能不同,需参考数据手册的"Pinout"章节(如STM32F103C8T6的PA0支持:GPIO、TIM2_CH1、TIM5_CH1、ADC1_IN0)。
复用功能查询步骤:
- 打开芯片数据手册(Datasheet);
- 找到"Pin Configuration"或"Alternate Function Mapping"表格;
- 查找目标引脚(如PA0),查看支持的复用功能。
3.2 复用功能配置步骤
以PA0复用为TIM2_CH1(定时器通道1)为例,配置步骤:
-
使能GPIO和外设时钟:
__HAL_RCC_GPIOA_CLK_ENABLE(); // 使能GPIOA时钟 __HAL_RCC_TIM2_CLK_ENABLE(); // 使能TIM2时钟 -
配置GPIO为复用模式:
GPIO_InitStruct.Pin = GPIO_PIN_0; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // 复用推挽(定时器输出PWM) GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 高速(PWM需要高频切换) HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); -
初始化外设:
TIM_HandleTypeDef htim2; htim2.Instance = TIM2; htim2.Init.Prescaler = 72-1; // 72MHz/72=1MHz htim2.Init.Period = 1000-1; // 1MHz/1000=1kHz PWM // ... 其他配置 ... HAL_TIM_PWM_Init(&htim2);// 配置TIM2_CH1为PWM输出 TIM_OC_InitTypeDef sConfigOC = {0}; sConfigOC.OCMode = TIM_OCMODE_PWM1; sConfigOC.Pulse = 500; // 占空比50% HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
此时,PA0不再由GPIO直接控制,而是由TIM2_CH1控制,输出1kHz的PWM波形。
3.3 重映射(Remap):灵活分配外设引脚
部分外设支持引脚重映射(Remap),即同一外设可映射到不同引脚(如USART1默认引脚为PA9/PA10,可重映射到PB6/PB7),解决引脚冲突问题。
重映射配置需通过AFIO寄存器(复用功能I/O)实现,以USART1重映射为例:
// 使能AFIO时钟(重映射必须)
__HAL_RCC_AFIO_CLK_ENABLE();// 配置USART1重映射到PB6(TX)和PB7(RX)
GPIO_PinRemapConfig(GPIO_Remap_USART1, ENABLE); // 标准库函数
// HAL库中通过GPIO_InitStruct的Mode间接配置,无需直接操作AFIO// 配置PB6和PB7为复用功能
GPIO_InitStruct.Pin = GPIO_PIN_6 | GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // TX为复用推挽
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
四、GPIO实战应用:从基础到进阶
4.1 应用1:LED控制(推挽输出)
LED是GPIO最基础的应用,通过推挽输出控制LED的亮灭或闪烁。
硬件连接
- LED正极串联220Ω限流电阻,连接到STM32的PC13引脚;
- LED负极连接GND;
- 原理:PC13输出低电平时,电流从VDD→电阻→LED→PC13→GND,LED点亮;输出高电平时,无电流,LED熄灭。
软件实现(闪烁LED)
int main(void)
{HAL_Init();SystemClock_Config();// 初始化PC13为推挽输出GPIO_InitTypeDef GPIO_InitStruct = {0};GPIO_InitStruct.Pin = GPIO_PIN_13;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // LED低速即可HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);// 主循环:LED每秒闪烁一次while (1){HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); // 低电平,LED亮HAL_Delay(500); // 延时500msHAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET); // 高电平,LED灭HAL_Delay(500);}
}
优化:使用BSRR寄存器实现原子操作
HAL_GPIO_WritePin内部通过GPIOx_ODR操作,可能被中断打断(导致电平异常),推荐用BSRR寄存器(原子操作):
// 替代HAL_GPIO_WritePin,直接操作寄存器
#define LED_ON() GPIOC->BSRR = GPIO_PIN_13 << 16; // 复位PC13(低电平)
#define LED_OFF() GPIOC->BSRR = GPIO_PIN_13; // 置位PC13(高电平)// 主循环中使用
while(1)
{LED_ON();HAL_Delay(500);LED_OFF();HAL_Delay(500);
}
4.2 应用2:按键输入(上拉输入+中断)
按键输入有"轮询"和"中断"两种方式,中断方式更高效(无需CPU持续查询)。
硬件连接
- 按键一端连接PA0,另一端连接GND;
- PA0配置为上拉输入:未按下时,内部上拉电阻使PA0为高电平;按下时,PA0被拉低为低电平。
软件实现(中断方式检测按键)
// 全局变量:按键状态标志
uint8_t key_pressed = 0;int main(void)
{HAL_Init();SystemClock_Config();// 初始化PA0为上拉输入,使能中断GPIO_InitTypeDef GPIO_InitStruct = {0};GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING; // 下降沿中断(按键按下时触发)GPIO_InitStruct.Pull = GPIO_PULLUP; // 上拉输入HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);// 配置NVIC中断HAL_NVIC_SetPriority(EXTI0_IRQn, 0, 0); // 优先级0HAL_NVIC_EnableIRQ(EXTI0_IRQn); // 使能EXTI0中断// 初始化LED(用于指示按键状态)GPIO_InitStruct.Pin = GPIO_PIN_13;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);while (1){if (key_pressed){key_pressed = 0; // 清除标志HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); // 翻转LED}}
}// 中断服务程序
void EXTI0_IRQHandler(void)
{HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0); // 调用HAL库处理函数
}// 中断回调函数(按键按下时执行)
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if (GPIO_Pin == GPIO_PIN_0){// 消抖:延时后再次检测HAL_Delay(20); // 20ms消抖if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET){key_pressed = 1; // 置位标志}}
}
关键技术:消抖处理
机械按键按下时会有10~50ms的抖动(电平快速跳变),可能导致多次中断,解决方案:
- 硬件消抖:按键两端并联100nF电容;
- 软件消抖:在中断回调函数中延时后再次检测引脚电平(如上述代码中的
HAL_Delay(20))。
4.3 应用3:模拟电平检测(模拟输入+ADC)
GPIO模拟输入模式可配合ADC采集外部模拟信号(如电位器电压、传感器输出)。
硬件连接
- 电位器一端接3.3V,另一端接GND,中间抽头接PA0;
- PA0配置为模拟输入,接入ADC1_IN0通道。
软件实现(读取电位器电压)
ADC_HandleTypeDef hadc1;// ADC初始化函数
static void MX_ADC1_Init(void)
{ADC_ChannelConfTypeDef sConfig = {0};hadc1.Instance = ADC1;hadc1.Init.ScanConvMode = DISABLE; // 单通道模式hadc1.Init.ContinuousConvMode = ENABLE; // 连续转换hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT; // 右对齐hadc1.Init.NbrOfConversion = 1; // 转换次数HAL_ADC_Init(&hadc1);// 配置PA0为ADC1_IN0通道sConfig.Channel = ADC_CHANNEL_0;sConfig.Rank = ADC_REGULAR_RANK_1;sConfig.SamplingTime = ADC_SAMPLETIME_55CYCLES_5; // 采样时间HAL_ADC_ConfigChannel(&hadc1, &sConfig);
}int main(void)
{HAL_Init();SystemClock_Config();MX_ADC1_Init();// 启动ADCHAL_ADC_Start(&hadc1);while (1){// 等待ADC转换完成HAL_ADC_PollForConversion(&hadc1, 100);// 读取ADC值(12位,范围0~4095)uint32_t adc_value = HAL_ADC_GetValue(&hadc1);// 计算电压(3.3V参考电压)float voltage = (adc_value * 3.3f) / 4095.0f;// 打印结果(需初始化UART,代码略)printf("ADC值:%d,电压:%.2fV\r\n", adc_value, voltage);HAL_Delay(500); // 每500ms读取一次}
}// ADC MSP初始化(配置GPIO为模拟输入)
void HAL_ADC_MspInit(ADC_HandleTypeDef* adcHandle)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if(adcHandle->Instance == ADC1){__HAL_RCC_ADC1_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();// PA0配置为模拟输入GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_ANALOG; // 模拟输入HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);}
}
原理说明
- 电位器输出电压范围0~3.3V,PA0通过模拟输入模式将电压传入ADC;
- ADC将模拟量转换为12位数字量(0对应0V,4095对应3.3V);
- 通过公式
电压 = (ADC值 × 参考电压) / 4095可计算实际电压。
五、GPIO使用注意事项与优化技巧
5.1 引脚电流限制
STM32 GPIO引脚的输出电流有限制(参考数据手册):
- 单个引脚最大输出电流:±20mA(STM32F1);
- 整个端口最大电流:100mA(如GPIOA所有引脚总电流);
- 芯片总电流:不同型号不同(F103最大150mA)。
超过限制的解决方案:
- 驱动大功率设备(如电机、高亮LED)时,需通过三极管或MOS管扩流;
- 多个引脚同时输出时,计算总电流,避免超过端口/芯片限制。
5.2 抗干扰设计
GPIO引脚易受电磁干扰,尤其在工业环境中,需注意:
- 输入引脚:关键信号(如按键)可增加RC滤波电路(10kΩ电阻+100nF电容);
- 输出引脚:高速切换的引脚(如PWM)应尽量短,避免产生高频噪声;
- 接地:模拟输入引脚的地线应与数字地分开(避免数字噪声干扰模拟信号)。
5.3 低功耗优化
电池供电设备需通过GPIO配置降低功耗:
- 未使用的引脚:配置为输入模式(上拉/下拉),避免悬空(悬空引脚会产生漏电流);
- 输出引脚:无需输出时,配置为输入模式(输出驱动器关闭,功耗降低);
- 模拟输入:不使用ADC时,将引脚配置为数字输入(关闭模拟开关,减少漏电流)。
5.4 寄存器操作vs HAL库
- HAL库:代码规范,跨系列兼容,适合新手和快速开发;但函数调用层次多,效率稍低;
- 寄存器操作:直接操作GPIOx寄存器(如
GPIOA->ODR |= GPIO_PIN_0),效率高,适合对实时性要求高的场景(如高频PWM)。
寄存器操作示例(翻转LED):
// 替代HAL_GPIO_TogglePin
GPIOC->ODR ^= GPIO_PIN_13; // 异或操作,翻转PC13电平
六、总结与进阶学习
GPIO作为STM32的基础外设,其灵活性和多功能性使其成为嵌入式开发的必备技能。本文从硬件结构到软件配置,详细讲解了:
- 8种工作模式的原理与适用场景(输入4种+输出4种);
- 引脚复用与重映射的配置方法;
- LED控制、按键输入、模拟检测三个实战案例;
- 实用技巧(电流限制、抗干扰、低功耗优化)。
进阶学习方向:
- GPIO与定时器结合:使用定时器PWM控制LED亮度(需复用推挽输出);
- GPIO与DMA:通过DMA读取GPIO输入数据(适合高速采集场景);
- 硬件抽象层设计:封装GPIO操作函数,实现跨平台兼容(如同时支持STM32和Arduino)。
掌握GPIO的核心是理解"模式配置决定引脚行为",实际开发中需根据外部电路选择合适的模式,平衡功能、效率和可靠性。无论是简单的LED闪烁还是复杂的外设驱动,GPIO都是构建嵌入式系统的基石。
附录:GPIO模式速查表
| 模式类型 | 配置(HAL库) | 核心特点 | 典型应用 |
|---|---|---|---|
| 浮空输入 | GPIO_MODE_INPUT+GPIO_NOPULL | 无上下拉,电平由外部决定 | 外部有上下拉的信号(I2C) |
| 上拉输入 | GPIO_MODE_INPUT+GPIO_PULLUP | 未接信号时为高电平 | 按键检测(一端接GND) |
| 下拉输入 | GPIO_MODE_INPUT+GPIO_PULLDOWN | 未接信号时为低电平 | 高电平触发的传感器 |
| 模拟输入 | GPIO_MODE_ANALOG | 接入ADC,可采集模拟信号 | 电位器、温度传感器 |
| 推挽输出 | GPIO_MODE_OUTPUT_PP | 可输出高低电平,驱动能力强 | LED、数字信号输出 |
| 开漏输出 | GPIO_MODE_OUTPUT_OD | 需外部上拉,支持线与 | 电平转换、多设备共用总线 |
| 复用推挽输出 | GPIO_MODE_AF_PP | 外设控制的推挽输出 | UART_TX、SPI_SCK |
| 复用开漏输出 | GPIO_MODE_AF_OD | 外设控制的开漏输出,需外部上拉 | I2C_SDA/SCL、SMBus |