无人机报警器技术要点与捕捉方式
一、技术要点
1. 多传感器协同探测
雷达探测:采用相控阵雷达(AESA)实现水平360°扫描(<1秒/圈),探测距离达5-10公里,精准输出目标距离、方位、速度信息。
无线电侦测:覆盖300MHz-6GHz频段,被动接收无人机遥控与图传信号,通过射频指纹识别机型。
光电确认:结合可见光(2000万像素)与红外热成像(640×512分辨率),识别无人机轮廓及热信号(电机/电池),定位精度≤5米。
声学辅助:麦克风阵列捕捉螺旋桨噪声(200-5000Hz),用于近距离目标确认。
2. 智能识别与数据融合
信号分析:解调通信信号提取设备ID、飞行参数,比对合法无人机数据库。
AI图像识别:基于YOLOv8等算法识别机型,结合卡尔曼滤波预测轨迹,遮挡3秒内重捕获率≥90%。
多源融合:采用JPDA/D-S证据理论融合雷达、光电、无线电数据,降低虚警率。
3. 分级响应机制
威胁评估综合航向、速度、机型(如爆炸物风险),触发驱离、迫降或硬摧毁等响应。
二、技术难点
1. 复杂环境适应性
电磁干扰:城市Wi-Fi/蓝牙与无人机频段重叠(2.4/5.8GHz),需空时自适应处理(STAP)抑制虚警。
气象影响:雨雾衰减雷达信号(30GHz雷达暴雨衰减3dB/km),光学探测距离下降50%。
背景噪声:风声掩盖螺旋桨噪声(>40dB失效),飞鸟、风筝易被误判。
2. 低小慢目标探测
微特征识别:微型无人机RCS仅0.01m²,需UHF波段雷达平衡穿透力与分辨率。
声光局限:声学探测距离≤1公里,光学需500mm长焦镜头识别远距目标。
3. 实时处理与资源限制
360°扫描需每秒处理TB级数据(高清视频+雷达点云),依赖边缘计算(如NVIDIA Jetson)。
雷达功耗>100W,便携设备需牺牲探测距离(如6.5kg设备限2.5公里)。
4. 反制副作用控制
大功率干扰误伤医疗设备,需定向波束成形(波束宽度≤5°)。
导航诱骗仅对民用GPS有效,军码加密难以破解。
三、捕捉方式
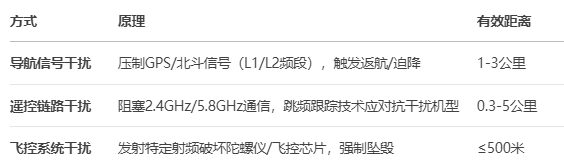
(1)软干扰:切断控制链路
(2)硬拦截:物理捕获
网捕装置:
地面发射网具(压缩空气/火箭推进),射程100-300米,捕获率≥80%。
拦截无人机携网近距离释放,适合低空低速目标。
激光拦截:
高能激光(100-500W)烧毁电机/电池,作用距离1-2公里,响应≤2秒。
声波驱离:
超声波(20-40kHz)干扰气压计,无电磁污染,适用于医院等敏感区。
分布式组网与智能化自适应防御演进,需平衡探测效率与误报风险。
