蓝光三维扫描技术:手机闪光灯模块全尺寸3D检测的高效解决方案
——某头部手机厂商代工企业零部件质量管控案例
3C消费电子行业,以其产品更新迭代速度快、竞争激烈著称。在这个追求极致工艺、精益求精的领域,产品的尺寸精度、外观质量、生产效率都至关重要。
快速变化的市场需求,要求企业具备更短的产品开发周期,并保证尺寸精度质量。手机闪光灯模组零件形状和轮廓复杂,要实现全面、准确的检测并非易事,蓝光三维扫描技术能够在短时间内完成对零件全尺寸检测,保证产品能够严格符合尺寸规格要求。

为何选择蓝光3D扫描进行检测?
可直接在车间条件下测量零部件,蓝光三维扫描仪是对坐标测量机 (CMM)的完整补充。
高公差特征的精密检测,选择三坐标,全尺寸测量交给蓝光三维扫描仪,有助于发现质量问题并加快检测效率。
蓝光3D扫描技术适用于各类零部件检测扫描,而不管其尺寸、形状、几何结构、表面粗糙度或材料如何。
闪光灯模块全尺寸检测重要性
1、确保产品功能与性能
性能保障:闪光灯的LED位置、透镜曲率、反光杯尺寸等直接影响光线分布和亮度。全尺寸检测可避免光斑不均、色温偏差等问题,确保补光效果符合摄影需求。
电气兼容性:模块尺寸偏差检测,可预防因装配误差引发的短路、过热等故障。
2、提升组装效率与良率
避免装配冲突:手机内部空间高度紧凑,全尺寸检测可避免组装干涉问题,减少返工。
降低供应链风险:通过检测供应商提供的部件尺寸一致性,避免因来料问题导致的生产线停滞或批次性缺陷。
3、满足高精度设计要求
微型化趋势适配:闪光灯模块,小空间集成多种功能(如双色温LED、激光对焦),全尺寸检测确保其在极限设计下精准安装和运行。
软硬件协同优化:尺寸精度影响闪光灯与摄像头算法的配合,微小偏差可能导致软件调校失效。
检测难题
手机闪光灯模块外形轮廓(如曲面弧度、安装孔位、共面度)是确保光学对齐与组装精度的核心指标,关键尺寸需严格控制公差。传统手段面临三大难题:
检测方法适用性
1、精度不足
投影仪仅能测量2D轮廓,无法量化曲面弧度(如导光板曲率半径公差±0.015mm);
手工卡尺抽检(覆盖率<10%)导致批次性尺寸超差漏检。
2、效率低下
接触式测量易划伤光学器件表面;
全尺寸检测耗时长,无法支持研发阶段快速迭代;
人工比对CAD图纸效率低,易误判复杂曲面。
3、数据不可溯
检测结果依赖纸质记录,无法构建尺寸公差数据库以优化工艺。
蓝光三维扫描检测方案
面对手机闪光灯模组部件厚度偏薄,尺寸小且曲面、位置度检测精度要求高带来的检测难题,采用新拓三维XTOM-MATRIX 500万像素的蓝光三维扫描仪,并通过调整扫描参数,确保从不同角度获取模块部件的完整3D数据。
复杂型面检测适用性
曲面、孔腔检测:蓝光3D扫描可捕捉复杂曲面、孔腔底面;
微结构再现能力:高分辨率工业相机,精准量化遮光槽的宽度波动;
透明/高反光件处理:蓝光滤波/显影剂,抑制透射干扰。
手机闪光灯模块部件检测
新拓三维XTOM-MATRIX蓝光三维扫描仪,扫描采集点云密度大,测量开口类槽孔,圆柱类,立柱类(带螺纹及不带螺纹),以及平面类特征具有明显优势。以下为3D扫描输出的手机闪光灯模块三角网格数细节数据:

手机闪光灯模块三维数据模型
在三维检测软件中,将实物模型与原始数模进行对比,生成详细的色谱偏差图,可以直观地展示零件的尺寸偏差、形状误差等关键信息,测量结果也可以导出PDF报告。
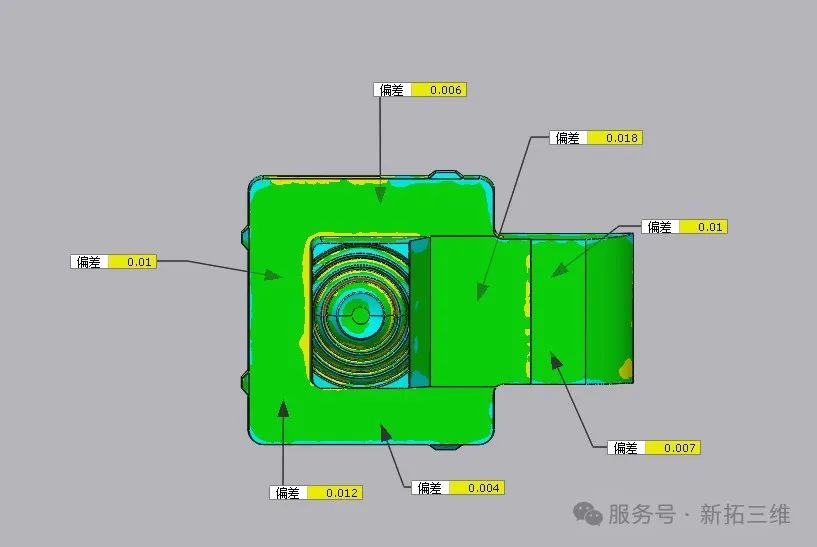
通过分析比对,确定加工余量或不足,确保成品符合设计要求及质量标准。3D检测便于数字化存档,作为制造过程各阶段状况的数字记录,以便后续质量追溯和管理。
数据分析与结果
品控升级:实现闪光灯模块全尺寸检测,分析平面度、遮光层厚度偏差分布;
工艺优化:通过色谱图锁定模具磨损规律,缩短修模周期;
标准输出:建立三维检测工艺库,适配摄像头模组、听筒等同类微型精密件检测。
蓝光3D扫描技术以其非接触、高效率、全尺寸检测等特性,完美适配手机微型零部件的复杂轮廓检测需求。
该方案在3C电子领域的应用,还包括手机中框曲面度、手机屏幕平面度、耳机轮廓度、Type-C接口共面度等典型检测场景,成为消费电子精密制造品质管控的标杆工具。